Стрелка ст радар технические характеристики: «Стрелка» трактует сомнения в пользу водителей :: Autonews
Содержание
Радар Стрелка. Антирадар против Стрелки: радар-детектор SilverStone F1
Комплекс контроля дорожного движения автоматизированный стационарный Стрелка
Одновременное обслуживание до 3-4 полос движения делает комплекс, по сравнению с другими, экономически более эффективным. Комплекс выполняется в стационарном («Стрелка-СТ») и мобильном («Стрелка-М») вариантах.
Не просто найти эффективный радар детектор на стрелку СТ. Радар-детекторы SilverStone F1 против стрелки.
Комплекс контроля дорожного движения автоматизированный стационарный «Стрелка-СТ» устанавливается с помощью кронштейнов на опорах ЛЭП, располагаемых на расстоянии не более четырех метров от кромки проезжей части дороги, и предназначен для автономного выполнения следующих задач:
измерения скорости движения и дальности всех автотранспортных средств (АТС), движущихся в плотном потоке;
обработки видеозаписи с целью выделения и сопровождения автомобилей, превышающих разрешенную скорость движения;
обнаружения и распознавания государственных регистрационных знаков (ГРЗ) АТС, движущихся в потоке по четырем полосам движения;
формирования кадров видеозаписи АТС, превысивших разрешенную скорость движения, с включением в кадр идентификационного номера поста, даты и времени события, скорости движения и фрагмента с распознанным ГРЗ;
передачи видеоинформации и данных по волоконно-оптическим линиям связи либо по радиоканалу на сервер баз данных, располагаемый в Оперативном Центре Управления;
формирования и отображения на рабочем месте оператора ОЦУ информации, поступающей от удаленного комплекса;
печати Протокола об административном правонарушении с включением в него видеокадров автомобиля в момент регистрации превышения скорости и на дистанции 50 метров. Печать может осуществляться на обратной стороне бланка с помощью встроенного цветного принтера.
Уверенное детектирование радара Стрелка-СТ!
Радар-детекторы SilverStone F1 способны обнаруживать радары типа Стрелка-СТ, который широко используется полицией на территории России. Помимо этого, в память устройства внесена база координат расположения стационарных радаров, что позволяет максимально повысить точность предоставляемой информации.
Все модели радар-детекторов SilverStone F1 подскажут вам, что вы находитесь в зоне действия комплекса Стрелка.
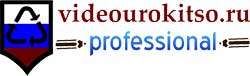
МОБИЛЬНАЯ ВЕРСИЯ РАДАРА «СТРЕЛКА-М»
Радар Стрелка М размещается на переоборудованном автомобиле типа «Газель», на крыше которого смонтирована силовая рама, с механизмом подъема стрелы с видеорадарным датчиком. Общая высота подъема видеорадарного датчика над поверхностью земли составляет 4,5 метра.
На стреле установлено поворотное устройство, обеспечивающее поворот датчика в азимутальной и угломестной плоскостях в пределах +/- 20 C. Подъем стрелы и поворот датчика осуществляется электродвигателями, управление которыми осуществляется инспектором с помощью компьютера, а контроль положения датчика отслеживается по изображению на экране монитора. Питание комплекса осуществляется от аккумуляторной батареи, заряд которой возможен как от внешней сети 220 В, так и от находящегося в заднем отсеке автомобиля, бензогенератора.
Все вторичные напряжения питания стабилизированы и защищены от перегрузок. В автомобиле установлены кондиционер и обогреватели, обеспечивающие нормальные условия работы экипажа в различных климатических условиях. Для связи с дежурной частью ГИБДД в автомобиле установлена радиостанция. В транспортном положении, с целью защиты комплекса от климатических воздействий и механических повреждений, он укладывается в специальный контейнер, открывающийся переключением тумблера, расположенного на пульте электропитания комплекса.
Радарный комплекс Стрелка-СТ/М и антирадары против него — Статьи
Последние несколько лет на территории РФ, в частности в Москве, сотрудниками ГИБДД все чаще используются комплексы по обнаружению нарушителей скоростного режима на дорогах, именуемое «СТРЕЛКА». Это новейшее оборудование, установленное на наших трассах, отличается от радаров прошлого тем, что ни один существующий радар-детектор не дает 100% информации об его местонахождении. Бывают эти комплексы двух видов: СТРЕЛКА-СТ (стационарный) и СТРЕЛКА-М (мобильный).
Тесты и их итоги
Радиотехнический комплекс «СТРЕЛКА» способен измерить скорость движущегося авто на расстоянии от 10 метров до 1 километра. Зависит это от угла установки прибора, а также от введенных параметров дальности и четкости. Важную роль к тому же играет ландшафт местности, на котором он установлен.
1. На дорогах с относительно невысокими скоростями (ограничение до 90 км/ч). Это одно или двух полосная трасса, с множеством населенных пунктов, соответственно с большим количеством ограничений скорости, и чаще всего с не совсем ровным ландшафтом.
В таких условиях «СТРЕЛКА» ставится под наиболее тупым углом по отношению к дорожному полотну и наклонен в сторону трассы. Параметры колеблются в таком диапазоне:
контроль начальной скорости: до 350-400м;
конечная скорость фиксируется на расстоянии 25 или 50м;
а оптика ГРЗ срабатывает на расстоянии 25-50м;
На сегодняшний день лучшим антирадаром, способным защитить водителей от данного радиолокатора, работающего в таком режиме, является продукт одного из лучших производителей радар-детекторов — Stinger RX-85 STM. Способен справится с поставленной задачей и аппарат российского производства Street Storm, оснащенный чипами EX. Обнаружить стационарный комплекс СТРЕЛКА-СТ им удается раньше, чем автомобиль попадает в зону его действия, происходит это на расстояния до 1.5 км.
2. На дорогах с относительно высокими скоростями движения (ограничение до 110 км/ч). Чаще всего это новенькие трассы с тремя или более полосами движения, где располагается минимальное количество населенных пунктов, и где установлено минимум знаком, ограничивающих скорость.
В такой ситуации комплекс будет расположен под наиболее острым углом к дороге и несущественно наклонен в сторону трассы. Параметры выставляются такие:
контроль первичной скорости: до 500-800м;
конечная скорость фиксируется на расстоянии 25 или 50м;
оптика ГРЗ срабатывает на расстоянии 25-50м;
И тут лучшим радар-детектором стал все тот же всемирный лидер Cobra — Cobra RU 865. Street Storm с чипами EX тоже расположился в числе устройств, способных обнаружить «СТРЕЛКУ» до входа в радиус ее действия. Делают они это на расстоянии до двух километров.
И что же мы наблюдаем в результате? С задачей по определению скорости автомобилей этот радиолокатор справляется и показывает себя на все 100 процентов. К нашему большому сожалению, на устройства по его обнаружению мы не всегда можем положиться. Однако все же существует способ избавить нас от этой головной боли. Для этого необходимо встроить в антирадары фильтрующие сигналы АЦП, настроенные под нужные виды радаров: «СТРЕЛКУ», Кордон либо схожие с ними системы.
В чем тут дело?
В основе этого комплекса лежат военные разработки начала двухтысячных (фактически бесшумные сигналы малой мощности). Эти устройства были переделаны для использования в гражданской сфере, частота 24.150 ГГЦ c разбивкой по канальным парам подчастот.
Исходя из этого, антирадары, принимающие сигналы на данной частоте, показывают не совсем конкретные значения в К-диапазоне (каналы-подчастоты). Их маленькая эффективность это следствие расположения сигналов от комплекса на нижней границе шкалы балансa сигнал/помехa. Аппараты с хорошей чувствительностью в диапазоне 24ГГц распознают сигнал радара на приличной дальности, но им необходимо обработать сигнал по большому количеству параметров, и именно поэтому они не могут выдать предупреждение тогда, когда нам это необходимо.
Внедрив в радар-детектор настройки на радиочастоты «заточенные» специально под «СТРЕЛКУ» (отдельно АПЦ), можно распознать ее с расстояния в 1.5 км.
Существует и еще один вариант для обнаружения стационарных комплексов – с помощью GPS по POI-точкам, сведения о которых есть во всех базаx навигаторов и комплексoв от Beltronics (STI-R), Cobra (Cobra iRadar 130 RU) или Radartech Pilot 21RS, который детектирует к тому же Стрелку и радарной частью.
Будем надеяться, что скоро появятся приборы, которые будут выполнять эту задачу с идеальной точностью. А как только они появятся, мы обязательно о них расскажем.
Отличия приложений антирадаров Стрелка и еСтрелка
Отличие приложений антирадаров Стрелка, еСтрелка и Антирадар N1 в основном состоит в уведомлениях о камерах видеофиксации ГИБДД.
Антирадар Стрелка — наиболее продвинутое приложение-антирадар в плане настроек.
С одной стороны, вы можете максимально гибко настроить всё под-себя, с другой стороны — нужно разобраться в документации. Некоторые моменты вызывают вопросы и вводят «в-ступор».
Есть мастер настроек, но он довольно сложен.
Антирадар еСтрелка и Антирадар N1 — больше заточены на «программа считает сама».
Нет понятия «Профили» — приложение само определяет ширину луча и дальность по ходовым характеристикам (скорость движения, время поддержания скорости, плотность камер впереди).
Нет понятия трех уведомлений, вместо них одно и опция «повторять».
Не настраивается бипер — он интеллектуальный в-зависимости от превышения.
Нет виджетов.
Зато в еСтрелка есть карты (поскольку оно изначально бесплатное) и более понятные настройки уведомлений.
Если впереди несколько объектов — Стрелка проговорит уведомление по каждому «Внимание камера … » потом «внимание переход….», а еСтрелка построит фразу «Внимание камера и переход….» — это удобнее.
Если в Стрелке надо выключить вибро для камеры — это нужно сделать в 9-ти местах (3уведомления*3профиля). В еСтрелка — в одном месте. Конечно, в Стрелке есть для этого Мастер, но с ним еще надо разобраться…
Вобщем, каждое из приложений имеет свои достоинства и особенности — лучше всего попробовать каждое из них!
Антирадар Стрелка
Антирадар №1 и еСтрелка
Профили
Нет (автоматически)
ТРИ уведомления
ОДНО уведомление и опция «повторять»
Бипер настраиваемый
Бипер автоматический
Мастер настроек (сложный)
Группы объектов
Виджеты
—
Android Auto*
—
—
КАРТЫ
* Android Auto поддерживается только для версии, скачанной с этого сайта.
Комплекс измерения скорости кордон. Многоцелевой фоторадарный комплекс «кордон.
ПРИНЦИП РАБОТЫ И КАНАЛЫ СВЯЗИ
В состав рубежа входит следующее оборудование:
Фоторадарный блок (1 ).
Блок электропитания (2 ).
Комплект соединительных кабелей.
Устройство для крепления фоторадарного
датчика.
Фоторадарный датчик устанавливается на опоре (мачте освещения) рядом с
проезжей частью дороги на высоте до 10 метров и подключается к сети 220 В.
Допускается также установка комплекса над проезжей частью дороги.
Датчик автоматически измеряет скорость всех транспортных средств в зоне
контроля и сохраняет две фотографии для каждого нарушителя: общим планом
(групповой снимок всей зоны контроля с выделением данного нарушителя) и
крупным планом (фотография нарушителя с визуально различимым номерным
знаком). Данные о нарушении включают в себя также распознанный номер,
зафиксированную скорость ТС, нарушения (движение по обочине, встречной
полосе или полосе для общественного транспорта), направление движения, дату
и время нарушения, значение максимально допустимой скорости на данном
участке дороги, название контролируемого участка, географические координаты,
серийный номер комплекса, номер и срок действия свидетельства об утверждении
типа средств измерений.
Первый видеоролик, демонстрирующий
принцип работы комплекса «КОРДОН» в одном направлении
Видеоролик, демонстрирующий
принцип работы комплекса «КОРДОН»
одновременно в двух направлениях
Видеоархив и данные о зафиксированных нарушениях хранятся в зашифрованном
виде в памяти датчика и могут быть переданы в ЦОД (3) по
защищенным проводным или беспроводным каналам связи (Ethernet, GPRS, Wi-Fi)
с использованием электронной подписи и технологии VPN для последующей
централизованной обработки.
В случае технических неполадок (длительного отсутствия связи),
возможна загрузка данных непосредственно с датчика с помощью ПО «Загрузчик
данных» на промежуточный носитель. Например, пользователь, оснащенный
ноутбуком с Wi-Fi, имеет возможность подключиться по беспроводному каналу
связи и импортировать данные на свой ноутбук.
ОСНОВНЫЕ ФУНКЦИИ И ОСОБЕННОСТИ
Автоматическое измерение скоростей, определение положения и
фотофиксация всех ТС на четырех полосах дорожного движения в обоих
направлениях.
Автоматическое фиксирование других нарушений ПДД: движение по
обочине и полосе для общественного транспорта, выезд на полосу встречного
движения.
Возможность установки порогов скорости для каждой отдельной
полосы и различных категорий ТС (грузовые, легковые).
Автоматическое распознавание различных форматов номерных
знаков стран СНГ и Европы.
Быстрое обучение системы распознавания новым форматам.
Возможность проверки распознанных номеров по различным федеральным и
региональным базам розыска.
Автоматическое сохранение данных о зафиксированных нарушениях во
встроенной памяти датчика.
Передача данных о зафиксированных нарушителях в единую централизованную
базу данных по проводным или беспроводным каналам связи.
Возможность выгрузки данных о зафиксированных нарушениях по резервному
беспроводному каналу связи (Wi-Fi).
Встроенный модуль навигации ГЛОНАСС/GPS.
Автоматическая коррекция системного времени и даты комплекса по сигналам
ГЛОНАСС/GPS.
Инфракрасная подсветка для обеспечения работы в ночное время.
Система видеонаблюдения в режиме реального времени.
Сохранение видеозаписей в архив, возможность поиска по заданному
промежутку времени.
Возможность интеграции в системы управления дорожным движением.
Сбор статистических данных об интенсивности транспортного потока.
Защита встроенного программного обеспечения и данных от
несанкционированного вмешательства.
Ведение журнала событий и действий пользователя комплекса.
Простота установки и настройки комплекса. При монтаже и обслуживании
комплекса не требуется перекрытие полос движения.
Встроенный сенсорный дисплей для упрощения настройки датчика.
Малые масса и габариты датчика, низкая потребляемая мощность.
ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ И ПОДДЕРЖКА
Отдел
ST100 Starterkit — Radartutorial
Стартовый комплект ST100
ST100 Starter Kit — лабораторная система для полного
радиолокатор непрерывного действия (CW)
и состоит из материнской платы с интерфейсом USB 1 к компьютеру, простой
K-Band
трансивер (K-LA1) в виде
активная антенна
и программное обеспечение для оценки полученных сигналов. Поставщиком этого инструмента является
RFbeam Microwave Ltd., г.
со штаб-квартирой в Швейцарии.Стартовый комплект ST100 идеально подходит для развития опыта в области
Доплеровский радар и может быть модифицирован в своем применении дополнительно предлагаемыми трансиверами.
Так как ожидаемый
Доплеровские частоты
находятся в диапазоне до 16 кГц (что соответствует
радиальная скорость
360 км / ч), ядро основной платы состоит из стереопроцессора, который был разработан для акустических приложений.
Этот оборудован двумя встроенными малошумными
аналого-цифровые преобразователи,
которые передают цифровой выходной сигнал с разрешением 16 бит через интерфейс USB-1 на компьютер.Два независимых канала позволяют анализировать амплитуду и фазовый угол с помощью трансивера с синхронным детектором и
I & Q– выходные контакты.
Программа представляет эти сигналы на экране компьютера в виде двух графиков:
Временная и частотная области.
Принятые сигналы могут храниться в памяти компьютера. и может быть воспроизведен на материнской плате для повторного представления результатов измерения в более позднее время.
Эта функция делает этот стартовый комплект очень интересным для обучения.
потому что результаты, полученные в полевых экспериментах, можно будет изучить отдельно в классе позже.
ST100 с его созданным в LabView программным обеспечением может подавать сигналы для ваших приложений, например, в технике безопасности.
В простейшем случае это может быть мониторинг помещения с помощью доплеровского радара, который указывает на любое движение в этом помещении.
Поскольку электромагнитные волны радара проникают даже через тонкие стены, эту технику можно установить очень незаметно.
При использовании двух стартовых комплектов, каждый из которых оснащен приемопередатчиком с усиленной узконаправленной патч-антенной,
тогда можно создать полноценный барьерный радар.Оба устройства затем работают с небольшим сдвигом частоты.
Тогда оба устройства будут иметь постоянный выходной сигнал без помех. Но каждый злоумышленник изменяет полученные сигналы, вызывая сильные колебания
первая зона Френеля,
и таким образом вызывает тревогу.
Патч-антенны приемопередатчика обычно состоят из передающей антенны в дополнение к отдельной приемной антенне.
На некоторых моделях приемная антенна может быть дополнительно разделена на две половины.
для оценки фазы между двумя каналами приема,
и, таким образом, иметь возможность определять направление на основе программного обеспечения.
Влияние дальности на разрешающую способность по пеленгу
Влияние длины развертки на разрешение по дальности
Влияние усиления приемника на разрешающую способность по дальности
Однопунктовые зоны
Оценка количества самолетов
3-17
Общие указания по составу
3-18
ЛОЖНЫЕ КОНТАКТЫ
3-18
Морской возврат
3-18
Малые доли
3-19
Облака
3-19
Импульсы радара
3-20
Двухдиапазонное эхо
3-21
Эхо-сигналы второго цикла
3-21
Отраженные эхо
3-21
Просыпается
3-21
Разные предметы на поверхности
3-21
ИНТЕРПРЕТАЦИЯ PPI
3-21
Тени от радара
3-21
3-1
Искажение ширины луча и искажение длительности импульса
3-21
Звон боковых лепестков
3-22
Низменность
3-22
Суда у берега
3-22
РАЗЛИЧНЫЕ СООБРАЖЕНИЯ
3-24
Смена курса
3-24
Слепые сектора
3-24
ЗАЩИТА ОТ ЗАДЕЛЕНИЯ И ОБНАРУЖЕНИЯ
ВВЕДЕНИЕ
3-25
ТАКТИЧЕСКОЕ ЗАГЛУШЕНИЕ РАДАРА
3-25
ЭЛЕКТРОННОЕ ЗАГЛУШЕНИЕ
3-26
Типы
3-26
Непрерывные или немодулированные помехи
Низкочастотные модулированные помехи
Высокочастотные модулированные помехи
Модуляция случайного шума
Глушение импульсов
Общие
Что должен делать оператор
3-28
МЕХАНИЧЕСКОЕ ЗАЖИГАНИЕ
3-30
Введение
3-30
Что должен делать оператор
3-32
ОБМАН ВРАГА
3-33
Окно
3-33
Дискретные отражатели
3-34
3-2
ЭКСПЛУАТАЦИЯ ОСНОВНЫХ ТИПОВ РАДИОЛОКАЦИЙ
ВВЕДЕНИЕ
Различные радары различаются по внешнему виду. У каждого есть свои специальные ручки,
виды презентации,
и «гаджеты», в зависимости от основной функции индивидуального набора.
Независимо от этого физического
дисперсии, в общем смысле можно много сказать о хорошем
оперативные методы
для всех радаров. Однако не предполагается, что информация в
этот раздел следует за
письмо при любых условиях и во всех тактических ситуациях.
Чтобы всегда получать максимальное тактическое преимущество от радара,
радар работает
методы должны меняться по мере изменения ситуации.Методы работы
должен быть гибким. Здравый смысл и глубокое знание военно-морской тактики должны определить, какой из
эти методы
следует использовать в любой ситуации.
Краткое описание различных основных элементов управления и индикаторов сформирует
фундамент для большего
подробное обсуждение методов работы.
1. Шкала диапазона . Какие масштабы использовать трут в каких условиях? Как
часто должны быть весы
сдвинута?
2. Регулировка усиления .Это соответствует регулировке громкости трансляции.
получатель. Если это должно быть установлено
высокий, низкий или средний?
3. Поворот антенны . Следует ли постоянно вращать антенну? Как быстро
он должен повернуться?
Должен ли он всегда искать область в 360 градусов? Если прекратить, на сколько?
4. Диапазон . Как следует читать диапазоны? Если шаг диапазона и
связанные циферблаты использоваться, когда
при условии? Следует ли использовать оценочные диапазоны с помощью
импровизированные гаммы?
5. Подшипники . Какими способами можно читать подшипники? Если
ошибка быть использована, или
следует ли вместо этого использовать курсор?
6. Объем . Если радиолокационная станция оснащена двумя и более типами
электронно-лучевые индикаторы, которые
следует использовать, и при каких условиях одно предпочтительнее другого?
Ответы на эти вопросы для разных типов радаров
действующие в различных тактических
ситуаций, предоставит вам основу для оперативных
техники. На этом основании
каждое особое обстоятельство потребует изменений, которые могут быть только
определяется опытом эксплуатации РЛС и здравым смыслом.
Есть три основных типа радаров:
1. Надводный поиск 2. Воздушный поиск 3. Управление огнем
В этом разделе мы обсудим работу первых двух типов.
в общих чертах. Однако,
поскольку радары управления огнем имеют очень разные характеристики,
рекомендуемый рабочий
методы будут конкретизированы для каждого типа и появятся только в
Часть 4.
Каждый тип радара был разработан для одной конкретной цели, и
ничего, что ты, как
оператор может изменить эти цели. Радиолокатор воздушного поиска — это
плохой поиск поверхности
радар, и наоборот. Каждый из этих типов может служить в аварийной ситуации как
РЛС управления огнем,
но он не мог ожидать, что они предоставят диапазоны, ориентиры и положение
углы с одинаковыми
степень точности как РЛС управления огнем, специально разработанная для этого
цель. В случае
выход из строя радаров воздушного или наземного поиска, системы управления огнем
снаряжение может действовать как обыск
задавать.
РАДАР ПОИСКА ПОВЕРХНОСТИ
Слова поверхностный поиск вводят в заблуждение, поскольку поиск — лишь один из многих
функции, которые имеют
был делегирован этому общему типу радара. Шесть основных функций:
перечисленные ниже вместе
с предложениями по оптимальной эффективности радара при любых условиях.
Дальний поиск крупных целей .
Важно, чтобы большие надводные цели обнаруживались максимально.
возможная дальность действия радара,
так что можно использовать эффективную атаку или тактику уклонения.Диапазон
масштаб должен быть длиннее
чем ожидаемая максимальная дальность на кораблях. Регулятор усиления должен быть установлен
для максимума
читаемость эха на расстоянии от 30 000 до 60 000 ярдов. Этот параметр должен быть
ранее установленный
для каждого конкретного набора радаров. Антенна должна быть повернута на
самая низкая доступная скорость; ан
периодическое сканирование следует производить с использованием ручного управления, если
при условии. Прицел «А» (если
радар оборудован таким образом) обычно показывает начальный контакт перед ним
появляется на PPI.
3-3
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ РАДАРА
Если контакт установлен, остановите антенну (при наличии средств
для остановки на
контакт) достаточно долго, чтобы получить первоначальный подшипник и прицел «A»
спектр. Попытаться
классифицируйте контакт специально, используя предыдущие знания о
возможности вашего
конкретный радар. Данные относительно ранее наблюдаемых максимальных диапазонов на
разные типы
корабли, размер пункта и состав пунктов будут полезны при создании этого
решение. Два курса
акции теперь открыты для вас. Вы можете следовать процедуре, описанной для
вспомогательная система управления огнем, или
вы можете возобновить обычный поиск. Ваше решение, естественно, будет основано на
тактическая ситуация.
Предположим для этого обсуждения, что вы не заинтересованы в стрельбе по
новый контакт. Однако,
вы могли бы пожелать приблизиться к ним, чтобы маневрировать
вокруг него. Ваша процедура,
тогда будет продолжать поиски на большие расстояния, считывание пеленгов и
диапазоны контакта »на
муха », не останавливая антенну.С практикой достаточно
поэтому точные данные могут быть
получается для поддержания достаточно точного трека. Важный
рассмотрение на лету
техника работы заключается в том, что вы продолжаете поиск других
контакты (которые капитан
может позже решить атаковать), не жертвуя поисковой эффективностью
радар, остановив его
антенна на контакте, который по общему признанию не представляет особого интереса.
Диапазоны, считываемые на лету, будут более точными
и его легче получить, если прицел диапазона «A» оснащен
шкала диапазона скотча, и если
PPI отмечен тонкими чернилами кружков диапазона. Подшипники можно оценить
прямо из PPI.
Ближний поиск мелких целей.
Это можно назвать поиском подводной лодки или катера, и его следует
проводится в первую очередь, когда
крейсерская самостоятельно. Во время круиза в компании OTC обычно
назначить поиск
функция каждого радара в силе. Шкала дальности для малой цели
поиск должен обычно
быть самой короткой доступной шкалой, хотя на некоторых наборах ее можно найти
что средняя шкала
можно использовать с большей пользой.Коэффициент усиления приемника должен быть изменен на за весь поиск его
настройка в зависимости от количества присутствующих морских возвращений и других тактических
соображения. Искать
перископы близко на борту, немного увеличьте усиление и ищите около
внешние границы зоны возврата в море надводных подводных лодок и малых сторожевых судов. Помни это возврат в море
в основном то же самое, что и эхо от цели, и что оно должно присутствовать
если должен быть обнаружен небольшой эхо-сигнал от цели .
Опыт эксплуатации определит правильную настройку усиления для
разное количество моря
возвращение.Вращение антенны должно быть как можно медленнее; снова сделать
случайное руководство
поиски. Новые цели должны появиться либо в области «A», либо в PPI.
почти
Рисунок 3-1. Избегайте этого, используя радар при изменении курса или выходе из строя.
3-4
ЭКСПЛУАТАЦИЯ ОСНОВНЫХ ТИПОВ РАДИОЛОКАЦИЙ
одновременно, при условии, что усиление установлено достаточно высоким для работы PPI.Эти индикаторы должны
поочередно наблюдать в течение равных периодов времени, чтобы снизить нагрузку на глаза
и однообразие. Если контакт
выполняется, следуйте процедурам, перечисленным для дальнего поиска. Если приступ
должно быть сделано на
цели, наведите радар управления огнем на контакт и возобновите
искать немедленно. Там
нет необходимости пытаться дублировать функцию РЛС управления огнем
с поисковой РЛС,
если только поисковый радар не требуется для решения проблемы торпеды, пока
РЛС управления огнем главной батареи занята.
Станционное обслуживание .
Существуют ситуации, когда потребуется исключительное использование поиска.
радар для станции
сохранение. Следует понимать, что когда этот радар используется для станции
сохраняя, это не
выполняющий по прямому назначению поисковый радар.
Нормальные требования к содержанию станции таковы, что антенна
должен быть повернут
непрерывно, используя шкалу ближнего действия на индикаторе. Подшипники и
диапазоны на гиде, или
на других подходящих кораблях в строю, можно оценить по PPI
объем.Было найдено
полезно, когда преобладают подходящие условия, для содержания участка непосредственно на
лицо удаленного PPI
осциллографа с помощью хинаграфического карандаша, или поставить точку на эталонном PPI
представляя место на
область, где руководство должно появиться, когда вы находитесь на станции. любой
индикация неправильной станции
сразу станет очевидным в этой системе. Искать не должно
забыто при хранении
станции, и штатный план смещения шкал дальности и усиления приемника
следует принять. Прирост
следует отклонять только при получении необходимого содержания станции
Информация .
По общему признанию, бывают ситуации, когда требуется чрезвычайно точная станция.
сохранение. Когда это
В этом случае следует соблюдать дополнительную процедуру пожаротушения с использованием
самый точный
диапазоны и пеленги доступны с радара. Поиск обязательно должен быть
забыли, или
сведены к минимуму, при сложных маневрах.
Навигация .
Одна из наиболее полезных функций РЛС поиска поверхности — это
вклад в навигацию.
Однако ограничения, возникающие при таком использовании радара, должны быть
полностью понял.Если вы не знаете контур и состав земли,
отражая энергию радара, вы
никогда не безопасно сообщать расстояние до «ближайшей точки суши». За
например, если вы
начиная с крутого обрыва, который поднимается
прямо вверх от кромки воды, можно смело предположить, что
диапазон до ближайшего
На сушу положительно указывает дальность, полученная с экрана радара. Если, однако,
местность постепенно поднимается от кромки воды до горы или горного хребта.
расстояние внутри страны,
существует вероятность, что значок на экране вашего радара был произведен
отражение от
горный массив, а не от пляжа.Практически невозможно
определить точную точку
отражение от наклонной поверхности и погрешность всего в несколько сотен
ярды могут оказаться
катастрофичен в тесной навигационной работе. Всегда держите контурную карту
близлежащая земля доступна для
ссылка, когда требуется навигационная информация. После осторожного
практика в «радарной карте»
сравнение с контурными картами знакомой местности, вы можете стать опытным
в оценке
отражающие поверхности на незнакомой местности. Это обсуждение относится к
конечно, к пилотированию, так как
радарные «вырезки» обычно будут отличаться от визуальных касательных, опять же в зависимости
по контуру
земельные участки.
Ширина луча антенны также должна быть учтена при попытке
сделано для получения радара
изображение береговой линии. Несколько иллюстраций покажут, почему это так.
Первая серия иллюстраций на рисунке 3-2 показывает, как радар берега
линия меняется как
корабль переходит из одного положения в другое. Обратите внимание, что гавань была
полностью скрыт
радиолокационной береговой линией во всех случаях, и что корабль, который может быть
расположен где-нибудь внутри
затененные области не будут отображаться из-за этой ширины луча
искажение.Пояснительная
примечания к первому рисунку применимы ко всем последующим
иллюстрации.
Все примеры основаны на предположении, что равные
отражение получается из
все точки вдоль береговой линии. Хотя это редко бывает на самом деле, это
это необходимое предположение
для теоретической ситуации. Береговая линия радара будет отличаться от
фактическая береговая линия
количество в зависимости от ширины луча антенны, контура и
состав земли в
непосредственной близости от береговой линии, пеленг судна от
берег в любой момент
время и используемое усиление приемника.
Невозможно описать все ситуации, с которыми он мог бы столкнуться.
на береговой линии
с радаром. Каждая проблема имеет свои особенности и должна быть решена.
лечится индивидуально
корабль задействован.
Более точные исправления можно получить, если эхо-сигналы от меньших участков суши
используются. О ИЦП
как показано на рисунке 3-3, точки X и Y обеспечат наилучшую навигацию
исправить.
3-5
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ РАДАРА
Рисунок 3-2.
3-6
ЭКСПЛУАТАЦИЯ ОСНОВНЫХ ТИПОВ РАДИОЛОКАЦИЙ
Часто бывает полезно построить график диапазона и слышимости в обратном направлении от вашего
оценка, или позиция DR,
и проанализируйте диаграмму, чтобы определить, есть ли возможные отражающие
поверхность. Хорошие и были диапазоны
пусть он идентифицирован таким образом. Он должен помнить,
Рисунок 3-3. Небольшие участки суши обеспечивают точную навигацию.
однако, что сама диаграмма может быть ошибочной, поэтому ее известная точность
необходимо учитывать в этом
процедура. Сборник эскизов композиции шипов может быть
полезно, когда вы вернетесь к
конкретное место.
Рисунок 3-4. Видные ориентиры помогают определить местонахождение корабля.
Вспомогательное управление огнем .
Вы, по определению, используете свой радар поиска поверхности в качестве
радар контроля огня, как только вы
начать отслеживать контакт.Часто это желательная процедура, несмотря на
тот факт, что поиск
эффективность при таких операциях снижается. Если на вашем корабле нет
управление огнем
радар, или, если такое оборудование вышло из строя, вам, возможно, придется полагаться
полностью на РЛС поиска поверхности для управления стрельбой.
Оператор радара должен указать более точные диапазоны и пеленги, чем
предоставленные
получение их «на лету». Есть два метода развития сюжета.
для противопожарных работ.Они будут подробно объяснены в RADFIVE. Независимо от того, какой метод
был выбран, вы
должен остановить антенну, чтобы получить точные диапазоны от прицела «А» и
подшипники из
индикатор пеленга. Если прицела «А» нет, наиболее точный метод
получения этих данных
должны быть выбраны в зависимости от конкретных установленных радаров.
Для обнаружения радара антенна должна быть зафиксирована на цели, пока
снаряды летят так, что
на индикаторе радара можно заметить брызги.Торпедоуправление работает
обычно делегируется
РЛС поиска поверхности и CIC, поскольку РЛС управления огнем заняты
необходимая меблировка
информация для решения проблемы перестрелки. Несмотря на высокий
степень точности
необходимо для удовлетворительного решения пожаротушения и
проблемы с управлением торпедой, лучший
процедура состоит в том, чтобы делать один или два полных оборота антенны каждую минуту
или так, чтобы убедиться
эта большая игра не приближается с другой стороны.
Композиция .
Весь радарный персонал требует непрерывной практики, прежде чем они станут
опытный в анализе
пип на экране радара. Когда вы находитесь в
компания с дружной
кораблей делать заметки (о влиянии позиционного угла, размера и типа
цели, диапазоны и относительные
подшипники) от состава эха.
Знакомые двояковыпуклые эхо часто отмечаются от больших кораблей, таких как
линкоры и
носители на средних или близких дистанциях. Колебания пипса
отличается, когда отражающий
объект — катящийся эсминец или более устойчивое грузовое судно.Это
среди «уловок, если
торговля «, которую оператор должен освоить, прежде чем он сможет рассмотреть
выше среднего.
ВОЗДУШНЫЙ ПОИСК
Постоянно меняющаяся тактика противника в отношении воздушных атак
затрудняет очертание
лучшие приемы эксплуатации для этого типа РЛС. Хотя основная
тактические ситуации будут
обсуждаться в этом разделе, ему хорошо бы помнить, что есть
не работает
условия, которые будут выполняться для всех условий радиолокационной защиты и
наступательные действия.
3-7
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ РАДАРА
Дальний поиск с воздуха .
Проблема, связанная с этим типом поиска, очевидна. Мы хотим сделать
начальный радиолокационный контакт
с ударными группами противника на максимальной дальности действия РЛС. Патрульные самолеты
и шпионы больше всего
перехватили до того, как они смогли передать по радио сообщения о нашей оперативной группе.
Шкала дальности должна быть установлена так, чтобы обеспечивать максимально возможную дальность в
соответствие с
наблюдаемые максимальные дальности действия конкретного радара, PPI и «A»
прицелы следует смотреть
поочередно с медленным вращением антенны. Получатель усиления, если он
установить на максимум
читаемость наблюдаемого индикатора. Это означает, что выигрыш
контроль будет на
различное положение для работы «A» и PPI.
При контакте с радаром антенна должна быть остановлена, а эхо-сигнал
тщательно изучены, чтобы определить
состав пипса.Цель должна быть атакована BL, и
область «A» должна
показать ответ IFF, если цель дружественная.
Следует немедленно возобновить медленное вращение антенны, а
всесторонний поиск продолжен
для обнаружения других возможных целей. Порядок действий в это время
будет варьироваться в зависимости от
многие факторы слишком многочисленны, чтобы представить их в этой книге. Тип силы,
наличие
истребителей, и обнаружение других тележек повлияет на решение
целевой группы
командующего, но вот что он может сказать в общем случае: открытие
тележки требует
даже больше
тщательный поиск 360-градусной области вокруг отряда. Удерживайте антенну во вращении медленно .
Подшипники должны быть получены от курсора подшипника на PPI, и
диапазоны должны быть оценены
непосредственно из PPI без использования метки диапазона. Это будет
благодаря диапазону красок
круги с интервалом в пять миль на стеклянной поверхности трубки PPI,
исключение использования
неудовлетворительная шкала дальности, которой снабжены эти агрегаты. Когда PPI не
доступные, диапазоны и
подшипники необходимо считывать «на лету» с помощью скотча.
шкала на шкале «А».
Ближний поиск и сопровождение множественных целей.
Эта процедура поиска может быть применена при атаке торпедного самолета.
неизбежный или вероятный,
и когда рейды приближаются с разных позиций. Непрерывный
вращение антенны
необходимость. Шкала диапазона должна быть установлена в среднее положение, а
усиление с поправкой на
максимальная читаемость PPI. Диапазоны и подшипники должны быть получены в
так же, как
что обсуждалось для дальнего поиска (из PPI).
Скорость вращения антенны следует увеличивать по мере приближения атаки
сила, и вы должны
будьте готовы перейти к ближнему масштабу, как только цели
достиг внешнего диапазона
пределы этой шкалы.Вы также должны быть готовы перейти на управление огнем. операция связи с
он тесно связан с операцией поиска с близкого расстояния.
Особенно важно сохранить на карте все свои самолеты.
воздух при контакте
с врагом возможно.Если этого не сделать, «шпион» или низколетящий
штурмовик может
появляются на экране неизвестного оператору радара. Эта практика
может потребовать, чтобы
антенну периодически останавливать, чтобы проверить возврат IFF, но однажды трек
был начат
любой конкретный самолет, проблема идентификации должна быть упрощена, и
тележки обнаружены
немедленно.
Сопровождение истребителя .
Для ночного перехвата этот вид работы радара должен выполняться
ночью истребитель
работать так, чтобы директор-истребитель мог эффективно сделать PPI
перехват.360 градусов
поиск прекращается, и антенна направляется только на область в
близость к
попытка перехвата. Однако этот метод концентрирует все ваши усилия.
на небольшой площади, и
следует использовать только при наличии достаточного охвата воздушным поиском со стороны
другие радары в силе.
Если команда оператора-плоттера не может предоставить самую последнюю информацию о радаре
картинка
дневной перехват, слежение за истребителем должно быть задействовано.
Слежение за множественными целями
однако предпочтительнее этого метода, поскольку все области покрываются
радар.
Слежение за сушей и поиск по суше .
Отслеживание целей над сушей не так сложно, как может показаться на первый взгляд,
хотя это искусство, которое
требует немалой практики. На самом деле это особый вид
Уловка директора истребителя, требующая особой техники.
Когда самолеты пролетают над сушей, их контакты не видны на экране.
PPI. Используйте «А»
прицела и шкалы кратчайшей дальности, по которой виден самолет (если вы
намерены отследить это).Когда антенна вращается вручную, медленно тренируйтесь по суше,
наблюдая за
прыгающий пункт среди устойчивых. Это укажет на наличие
самолет над землей, а ты
может тогда считывать его расстояние почти так же точно, как если бы земли не было. Чтобы
найти свою опору,
осторожно отрегулируйте антенну для максимальной активности прыгающего конуса.
Вы должны практиковать эту технику на дружественных самолетах в порту. МКФ
дает отличный
метод проверки время от времени, чтобы быть уверенным, что вы находитесь в самолете.
Связной с пожарными .
Когда атакующие группы самолетов закрылись в пределах 20 миль от сил,
важно, чтобы
поддерживать тесное сотрудничество между РЛС воздушного поиска и
РЛС управления огнем. В
орудия часто приходится «разговаривать» непосредственно с радара воздушного поиска или
электрическая цель
системы обозначения, подключенные к этому РЛС.
В зависимости от конкретной установки радар может быть настроен на оснащение
либо истинный, либо относительный
подшипники.Предпочтительно использовать настоящие подшипники, если они подходят
конверсии были
включены в
Рисунок 3-6. Быстрое вращение антенны для сопровождения целей на малых расстояниях.
3-9
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ РАДАРА
противопожарное оборудование. Если нет, он должен указать относительные ориентиры.
Антенна должна вращаться как можно быстрее, а диапазон масштабирования
должен быть использован
самый короткий из доступных на радаре. Хотя это значительно снижает эффективность воздушного поиска корабля, главное
должен быть отдан артиллеристу
когда самолеты приблизились к дальности атаки.
Боковые лепестки особенно опасны при этом типе операций, а
оператор должен быть быстрым
чтобы различать вовлеченные посторонние эхо. Это поможет уменьшить
получить насколько
возможно, чтобы свести к минимуму эти эхо-сигналы.Они часто могут быть
отличается сравнением
их ширина (в градусах)
с эхом, полученным за счет излучения главного лепестка.
Композиция .
Прицел «А» имеет наибольшее значение, когда состав контакта
должен быть получен.
Постоянные учения эксплуатационных бригад по оценке состава
дружественные самолеты из
бесценная ценность как средство получения надежных данных для использования в
вражеские набеги.
Состав рейдов следует проверять регулярно, примерно каждые
20 миль от цели
путешествия, чтобы убедиться, что любое разделение атакующих групп может быть отмечено:
предполагаемый размер
рейд надо перепроверить.
ПИПОЛОГИЯ
ВВЕДЕНИЕ
Pipology предполагает изучение и интерпретацию всех типов контактов
видно по индикаторам радара.
Композиция — слово очень похожее, но не всеобъемлющее, и
отвечает на вопросы: что
тип? Как много? друг или враг? Определение композиции — это искусство,
и, возможно,
самый приятный этап работы радара. Учитывая достаточно времени, почти любой
могу получить подшипник
и дальность до цели, но это требует навыков, воображения и, прежде всего,
опыт, чтобы определить
сочинение.С постоянным опытом и повышенными навыками ваш
прогнозы должны быть о
80% правильно. Попытка идентифицировать каждое появляющееся эхо даст вам
практика вам нужна, и
по возможности попросите кого-нибудь выяснить, что это за цель,
и таким образом проверьте
точность вашей оценки.
Способность интерпретировать пункты проистекает из знаний, полученных в процессе обучения.
и из бесконечного
часов практики на радаре. Важно не только распознать
цель, но и
распознать его в кратчайшие сроки.Некоторые из преимуществ
скорости бывают:
1. Он помогает плоттерам собирать информацию.
2. Он помогает офицерам корабля быстро принимать решения и принимать решения.
3. Это дает бригаде-постановщику оружия и операторам компьютеров необходимое время.
в наводке оружия на
цель.
4. Это повышает общую эффективность радиолокационных часов.
Пипсы бывают разных типов. Каждый тип поддается интерпретации.В
вообще есть четыре
характеристики пунктов, которые дадут вам полезную информацию
интерпретация.
1. Размер пункта.
2. Форма шипа.
3. Покачивание или колебания в высоте.
4. Движение по дальности или азимуту.
Прицел «А» наиболее подходит для наблюдения за размером и отклонением пипсов, развернутый или
Прицел ближнего действия «A» для наблюдения за формой , в то время как движение лучше всего видно на
ИЦП.В
в следующем разделе эти характеристики пипса рассматриваются более подробно, чтобы
помочь вам в интерпретации
вещи, которые вы, вероятно, увидите на радарах.
СОСТАВ
Друг или враг .
Первое, что необходимо определить, это статус друга или врага
контакт. Это можно сделать
только с помощью вашего интеррографа IFF или путем получения информации от
другой корабль в
ваша сила, которая уже установила этот статус. Методика
разрешение такой ситуации является
вопрос доктрины.Вы будете проинформированы о том, нужно ли вам
произвести идентификацию,
как правило, вы делаете.
Установив статус друга или врага контакта, следующий шаг
замечать быстроту
и степень колебания эха. Учитывайте высоту
эхо, вспоминая эффект
диапазона и затухания; затем отметьте глубину или толщину эхо. Если
эхо насыщено, уменьшить
выигрыш. Посмотрите на верхнюю и боковые стороны эхо-сигнала, чтобы увидеть наличие двух
шишки или много маленьких
неровности.С какой скоростью движется эхо? Посмотри на все
и нарисуй свой
весь фон знаний и опыта, чтобы интерпретировать то, что вы видите.
3-10
ПИПОЛОГИЯ
Оценка размеров корабельных целей .
В первую очередь от того, от чего зависит размер пункта (сила полученного
эхо) зависят? Ответ
это, к сожалению, довольно много вещей, самая важная из которых
находятся:
1.Дальность цели.
2. Размер мишени.
3. Высота вашей антенны (особенно когда речь идет о надводных целях).
4. Высота мишени.
5. Является ли цель луком или залпом (угол цели).
6. Атмосферные условия.
7. Материал, из которого состоит мишень.
8. Правильность настройки.
9. Состояние материальной части РЛС.
Из-за наличия множества переменных невозможно определить
точный размер цели в
каждый случай, но вы всегда можете разумно
Рисунок 3-7.Две средние, три маленькие мишени.
точная оценка. Вот что вы знаете: если у вас есть большой и маленький
нацеливаться на
примерно такой же диапазон, большая цель будет производить большую
пип (более сильное эхо),
при прочих равных условиях. Итак, если вы обнаружите любую вражескую оперативную группу
приближается, картинка на
ваш PPI может выглядеть так, как показано на рисунке 3-7. Таким образом, только положительных вещь такого размера
сообщит вам относительный размер различных целей примерно на
тот же диапазон.
Лучший способ определить приблизительный размер цели — это
соблюдать диапазон, в котором
был впервые обнаружен. Этот метод особенно хорош с СВЧ.
РЛС поиска поверхности, такие
как SG, SF, SL, SO и т. д. Радиоволны от этих радаров распространяются в
практически прямая линия. В
в любом заданном диапазоне требуется объект определенного размера, чтобы вернуть эхо, которое
просто видно на
экран или прицел с настроенным радаром как можно лучше. Следовательно,
различные виды
цели или типы кораблей впервые становятся видны в прицел на некоторых
определенный диапазон.Эхо
сначала исходят от мачты и верхней надстройки корабля. В
предложения надстройки
цель примерно одинакового размера независимо от направления, с которого
это видно.
Каждый радар будет иметь свои характеристические диапазоны для обнаружения
различные типы мишеней,
в зависимости от высоты установки антенны, мощности и
чувствительность конкретного
снаряжение.
Оценка приблизительного размера целей меньше максимального
диапазон может быть сделан
учитывая силу эхо-сигнала, дальность и целевой угол.Чтобы
облегчить этот процесс
журнал, который он должен вести для записи этих данных. Затем данные могут быть
сведены в таблицу для быстрого ознакомления,
с указанием силы эхо-сигнала в единицах Е, дальности, угла цели и типа корабля,
а также любые специальные
особенности пипса, которые можно было бы заметить.
Система обозначения силы эха E основана на соотношении
высота эха до травы
высота. На это соотношение не влияет настройка усиления.
контроль. См. Рисунок 1-17 в Части 1, Общие принципы работы радара.
Целевой угол является важным фактором, за исключением крайнего максимума.
спектр.Это угол
измеряется от носа корабля-цели по часовой стрелке (вправо) до
линия, проведенная между твоими
корабль и целевой корабль. Другими словами целевой угол — это относительный
пеленг вашего корабля как видно
с целевого корабля. Если вы находитесь позади него, целевой угол равен 1800;
если ты его понимаешь
левый луч, целевой угол 270 градусов. Целевой угол можно найти по
отслеживание цели несколько
минут (см. RADFIVE, The Surface Plotting Manual ). Ссылка на это
табулирование будет
Рисунок 3-8.Относительные максимальные дальности действия РЛС для различных типов кораблей.
3-11
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ РАДАРА
дают один из лучших ключей к приблизительному размеру кораблей, увиденных первым
ниже максимума
спектр.
Подскакивающее движение пипса дает еще один способ оценки
приблизительный размер
корабль. Большая цель обычно проявляется в виде медленно покачивающейся иглы, различающейся по длине.
размер от среднего до
большой.Меньший объект обычно дает более сильно колеблющийся звук,
и, особенно если море
прерывистый, может давать эхо, которое будет колебаться между средними
пип и совсем без пипса.
Конечно, волнение моря влияет на количество порхающих шипов.
и это всегда должно быть
принимая во внимание. В безветренный день эхо от неподвижных объектов,
например маяк,
будет производить абсолютно устойчивый шип, рукоять, если ваш собственный корабль катится,
даже этот тип объекта
будет создавать восходящие и падающие сигналы, если антенна не будет стабилизирована.
Другой способ иногда определять тип движущегося объекта — это
отслеживание и построение его
положение за определенный период времени, чтобы определить его скорость. Иметь ввиду,
однако движение
собственного корабля заставляет цель менять положение на экране радара.
Вот несколько примеров информации, которую вы можете получить от
радар. Попробуй определить
от них какая цель: вы обнаруживаете объект на расстоянии 9000 ярдов. На
PPI это только появляется
раз в два-три оборота.При осмотре на телескопе
Пип развевается
быстро. По отслеживанию и нанесению цели вы определяете ее скорость
ему около 35 узлов.
Поскольку вы не подняли цель, пока она не оказалась достаточно близко к вам,
это указывает на то, что это
малая цель: быстрое колебание также указывает на маленькую цель. Из
скорость 35 узлов вы
Можно предположить, что целью является небольшая, быстрая лодка, возможно, PT. Такой же
тип цели, имел это
был неподвижен, мог быть буем, особенно если вы были рядом с сушей
где буйки он мог бы
ожидается.
Оценка количества судов .
Разрешение по пеленгу и дальности . Цели при этом
диапазон представит отдельные пункты, только если они отличаются по азимуту на
определенный минимальный угловой
расстояние. Этот угол называется азимутальным разрешением радара, и
это варьируется от набора к выпуску
(пропорционально ширине луча). С другой стороны, цели на
такой же подшипник будет представлен
отделять пункты только тогда, когда они разделены в диапазоне определенным минимумом
расстояние.Этот
расстояние называется , разрешение по дальности радара, и оно также варьируется
от множества к множеству (будучи
пропорционально длительности импульса)
На рисунке 3-10B показано изображение, появляющееся на прицеле диапазона с
антенна натренирована на
одиночная цель,
а на рис. 3-10C показано изображение, отображаемое на PPI под тем же
условия. Изучить
внимательно размер кочки. Теперь внимательно проверьте размер косточек на фигурах.
3-11B и 3-11C с
антенна нацелена на две цели в пределах вашего луча, обе одновременно
спектр.
На шкале диапазона пункт намного выше в результате большего количества отраженных
энергия учит вашу
антенна, а на PPI пип намного шире. Пип не глубже
(толще), так как
временная база представляет только диапазон цели. Рисунки 3-11B и
3-11C показывает только одну точку,
поскольку цели находились слишком близко друг к другу для разрешения пеленгации
используемый радар.
Рисунки 3-12B и 3-12C представляют собой изображения диапазона и PPI.
объем соответственно,
когда цели все еще находятся на том же расстоянии, но с их пеленгом
разница достаточно велика, чтобы
получить разрешение по азимуту, как показано на рисунке 3-12A.Здесь новый пип
появится как
антенна настраивается на пеленг каждой отдельной цели; их энергия
не будет кумулятивным
поскольку разница в пеленге больше, чем эффективный луч антенны
ширина.
Затем рассмотрим рисунки 3-13B и 3-13C. Здесь вы снова видите антенну
указывая только на один
цель, как показано на рисунке 3-13A. Внимательно сравните эти пипсы с теми
в цифрах
3-14В и 3-14С. Обратите внимание, что точки на рисунках 3-14B и 3-14C глубже как прямой
результат разницы в дальности между двумя целями.Если двое
цели под наблюдением
имеют даже большую разницу в диапазоне, глубокая точка будет казаться разделенной, так как
показано на рисунках 3-15B
и 3-15С. Здесь количество отдельных пиков будет указывать на количество
целей.
Влияние дальности на разрешение по азимуту . Как показано на рисунке 3-16,
способность радара
разделение двух целей близко друг к другу по пеленгу увеличивается по мере увеличения дальности уменьшается , потому что
Угловая разница в их подшипниках составляет , увеличение .Обратите внимание, что два
корабли покрыты
simultaneo
AdvanceGuard Технические характеристики — Navtech радар
не определено, не определено, не определено, не определено, не определено, не определено, не указано 1
Легкий переносной
Перехват, обнаружение и отслеживание целей
Классификация и дифференциация целей
Сетевые датчики
Локальное или дистанционное управление
Быстрое обучение навыкам
Быстрая установка
Низкая вероятность перехвата
Чрезвычайно надежный
Пограничная охрана
Наблюдение на поле боя
Охрана периметра гражданских объектов
Охрана периметра военных объектов
Охрана боевых операций
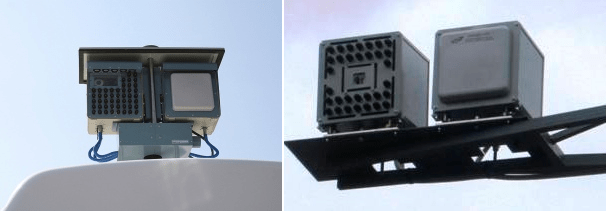
Переносной радар AT PGSR — уникальный легкий портативный радар. который способен перехватывать, обнаруживать и следовать за целями, движущимися по земле или близко к ней.Он также может классифицировать и дифференцировать цели на основе их размера и характеристик движения.
Радар представляет собой универсальное и экономичное решение, предлагающее множество преимуществ, что делает его идеальным выбором для пограничной службы, наблюдения за полем боя, безопасности гражданских и военных объектов и ведения боевых действий. операционные обязанности.
Благодаря небольшому весу и небольшим размерам, AT PGRSR может переноситься в рюкзаках группами из двух человек.Его также можно установить на транспортных средствах и на стационарных столбах по мере необходимости. AT PGSR может использоваться как автономное устройство, так и в сети от 2-3 радаров до нескольких десятков датчиков, в зависимости от специфики сценария наблюдения.
Передовые технологии DSP, интегрированные в AT PGSR, различают движущиеся и неподвижные цели, определяют точные параметры обнаруженных целей и управляют адаптивным обнаружением при изменении условий окружающей среды. Алгоритмы DSP предоставляют информацию в формате «готов к отображению» для операторского пульта или центра дистанционного управления.
Управление работой AT PGSR осуществляется с пульта оператора или командного центра. Управляющее программное обеспечение радара способно использовать различные форматы карт и отображать обнаруженные цели на карте. Программное обеспечение разработано в удобной для пользователя форме. Маленькие значки обозначают различные функции и упрощают обучение даже для неподготовленных пользователей. РЛС можно настроить и подготовить к работе за пять минут.Он прост в обслуживании и эксплуатации с минимальной потребностью в специальном обучении. Программное обеспечение поддерживает интеграцию этого единственного радара в сложные многосенсорные системы.
Радар очень прочен, способен выдерживать широкий спектр факторов окружающей среды, а также очень надежен, с минимальной вероятностью неисправности (наработка на отказ> 10000 часов).
Благодаря принципу работы AT PGSR имеет минимальную вероятность быть заблокированным или перехваченным (LPI-Low Probability of Intercept).
AT PGSR Портативное наземное наблюдение — Технические характеристики
Наблюдение и обработка данных
Типичная дальность обнаружения
Пешеход: 6 км (RCS 0,5 м²) Вооруженный солдат: 8 км RCS 1 м²) Автомобиль: 15 км (RCS 10 м²) Большой автомобиль: 24 км (RCS 50 м²)
Диапазон: 3 м (на расстоянии 3 км) Азимут: ≤ 0.3 °
Минимальная определяемая радиальная скорость
1,0 км / ч
Целевая пропускная способность
10 графиков / сек более 300 дорожек более 1000 отображаемых графиков
Окно точек
Да
Классификация целей
Автоматическая и аудио
Обработка
STC, FFT, CFAR, PLOT EXT., TRACK EXT.
Интерфейс данных / управления
RS-485, WIFI, Ethernet
Технические параметры
Принцип работы
FMCW
Антенна
28 дБи, патч, горизонтальная поляризация
Диапазон частот
Диапазон I / J (X), 32 фиксированных канала и автоматическое переключение
Макс.Передаваемая мощность
2 Вт
Источник питания радара
28 В постоянного тока (22 — 33 В постоянного тока), макс. 50 Вт
Непрерывная работа от одного комплекта батарей
10 — 12 ч.
Температурные диапазоны
Эксплуатация: от -32 ° C до + 50 ° C Хранение: от -40 ° C до + 60 ° C
Вес системы
30 кг
Размер радарного блока
69 x 47 x 13 см
MTBF
> 10 000 часов
Развертывание / упаковка
<5 минут
Ремонтопригодность
2 уровня BIT для LRM
RetWis — сквозное Настенный радар
See Through Wall Radar-RetWis 4.3
Профессиональный радар, предназначенный для локализации людей, остающихся за сплошными преградами. Принцип работы RetWis основан на обнаружении микродвижений, вызванных сердцебиением и дыханием людей, находящихся по другую сторону стены.
Уникальная технология, используемая в устройстве, гарантирует очень высокую чувствительность. Радиолокатор позволяет обнаруживать людей сквозь дерево , кирпичи или бетон на расстоянии до 20 м от стены (в зависимости от ее типа, толщины и конструкции здания).Радар RetWis следует размещать близко к стене, чтобы оператор мог наблюдать двух- или трехмерную карту , отображающую положение людей позади нее, на большом и четком дисплее. RetWis легкий (всего 7 кг с батареями), удобен в транспортировке и имеет компактную конструкцию , что позволяет быстро развернуть его, когда и где это необходимо. Видящий сквозь стену радар — незаменимый инструмент, поскольку информация о положении людей за прочными преградами неоценима во время спасательных операций или тактических операций.
Видящий сквозь стену радар RetWis может применяться в ряде ситуаций
в армии — знание о численности и размещении вражеских сил в соседней комнате значительно повышает безопасность солдат во время тактических операций
в полиция и правоохранительные службы — незаменимый напр. во время спасения заложников, позволяя определить количество и размещение людей на оккупированной территории, помогая ответственному офицеру принять решение о порядке действий
в аварийно-спасательных службах стихийных бедствиях, таких как ураганы, землетрясения или пожары, часто требовать оперативных действий для спасения жизней пострадавших от стихийного бедствия; устройство позволяет сэкономить драгоценное время, найти попавших в ловушку и раненых, а также повысить безопасность поисково-спасательных групп
Ключевые особенности системы RetWis
высокая чувствительность, дальность действия до 20 м
простое и интуитивно понятное управление
удобный и легкий
на штативе
для хранения данных
для горизонтальных и вертикальных поверхностей
Видео о продукте
Спецификация радара для просмотра сквозь стену — RetWis 4.3
Дисплей
цвет
Определение местоположения людей
двух- или трехмерный
FOV
по горизонтали — 130 °
по вертикали — 100 °
Дальность видимости настенного радара
до 20 м
Срок службы батареи
до 3 часов
Проникновение материалов
Размеры
500 × 420 × 160 мм
Вес видимого радара
7 кг
Видящий настенный радар — RetWis 4.3
Зарядное устройство
Кабели
Стойка с поворотной головкой
GPS.gov: Рабочие стандарты и спецификации
На этой странице:
На других страницах:
Эти документы определяют уровни технических характеристик, которые пользователи могут ожидать от GPS и связанных систем.
Некоторые ссылки на этой странице ведут к содержимому в формате Portable Document Format (PDF) и могут потребовать установки программного обеспечения PDF.Получить программное обеспечение
Стандарт производительности службы GPS Standard Positioning Service (SPS)
Этот документ определяет уровни производительности, которые правительство США предоставляет пользователям стандартной службы определения местоположения GPS, также известной как гражданская служба GPS.
Скачать 5-е издание
(2,1 МБ)
В настоящее время действует пятая редакция стандарта производительности GPS SPS от апреля 2020 года, которая заменяет собой все предыдущие версии.
Предыдущие версии представлены здесь для исторической справки. Эти документы больше не действуют.
Стандарт производительности службы точного позиционирования GPS (PPS)
Этот документ определяет уровни производительности, которые правительство США предоставляет авторизованным пользователям службы точного определения местоположения GPS, также известной как военная служба GPS.
Скачать 1-е издание
(1.8 МБ)
Первоначальный выпуск документа от 23 февраля 2007 г. действует в настоящее время.
Стандарт производительности системы глобального расширения GPS (WAAS)
Этот документ определяет уровни производительности, которые правительство США делает доступными для пользователей GPS SPS, дополненных системой глобального расширения.
Скачать 1-е издание
(1,4 МБ)
Первоначальный выпуск документа от 31 октября 2008 г. действует в настоящее время.
Технические характеристики GPS гражданского мониторинга
Цель этого документа — предоставить исчерпывающий сборник требований к мониторингу государственной службы и сигналов GPS на основе требований высшего уровня по постоянному мониторингу всех сигналов.
Скачать 3-е издание
(900 КБ)
Третье издание документа от 14 августа 2020 г. действует в настоящее время и заменяет собой все предыдущие версии.
 Печать может осуществляться на обратной стороне бланка с помощью встроенного цветного принтера.
Печать может осуществляться на обратной стороне бланка с помощью встроенного цветного принтера. Печать может осуществляться на обратной стороне бланка с помощью встроенного цветного принтера.
Печать может осуществляться на обратной стороне бланка с помощью встроенного цветного принтера.









 Поставщиком этого инструмента является
RFbeam Microwave Ltd., г.
со штаб-квартирой в Швейцарии.Стартовый комплект ST100 идеально подходит для развития опыта в области
Доплеровский радар и может быть модифицирован в своем применении дополнительно предлагаемыми трансиверами.
Поставщиком этого инструмента является
RFbeam Microwave Ltd., г.
со штаб-квартирой в Швейцарии.Стартовый комплект ST100 идеально подходит для развития опыта в области
Доплеровский радар и может быть модифицирован в своем применении дополнительно предлагаемыми трансиверами. Но каждый злоумышленник изменяет полученные сигналы, вызывая сильные колебания
первая зона Френеля,
и таким образом вызывает тревогу.
Но каждый злоумышленник изменяет полученные сигналы, вызывая сильные колебания
первая зона Френеля,
и таким образом вызывает тревогу. У каждого есть свои специальные ручки,
виды презентации,
и «гаджеты», в зависимости от основной функции индивидуального набора.
Независимо от этого физического
дисперсии, в общем смысле можно много сказать о хорошем
оперативные методы
для всех радаров. Однако не предполагается, что информация в
этот раздел следует за
письмо при любых условиях и во всех тактических ситуациях.
У каждого есть свои специальные ручки,
виды презентации,
и «гаджеты», в зависимости от основной функции индивидуального набора.
Независимо от этого физического
дисперсии, в общем смысле можно много сказать о хорошем
оперативные методы
для всех радаров. Однако не предполагается, что информация в
этот раздел следует за
письмо при любых условиях и во всех тактических ситуациях. Регулировка усиления .Это соответствует регулировке громкости трансляции.
получатель. Если это должно быть установлено
высокий, низкий или средний?
Регулировка усиления .Это соответствует регулировке громкости трансляции.
получатель. Если это должно быть установлено
высокий, низкий или средний? На этом основании
каждое особое обстоятельство потребует изменений, которые могут быть только
На этом основании
каждое особое обстоятельство потребует изменений, которые могут быть только В случае
выход из строя радаров воздушного или наземного поиска, системы управления огнем
снаряжение может действовать как обыск
задавать.
В случае
выход из строя радаров воздушного или наземного поиска, системы управления огнем
снаряжение может действовать как обыск
задавать. Антенна должна быть повернута на
самая низкая доступная скорость; ан
периодическое сканирование следует производить с использованием ручного управления, если
при условии. Прицел «А» (если
радар оборудован таким образом) обычно показывает начальный контакт перед ним
появляется на PPI.
Антенна должна быть повернута на
самая низкая доступная скорость; ан
периодическое сканирование следует производить с использованием ручного управления, если
при условии. Прицел «А» (если
радар оборудован таким образом) обычно показывает начальный контакт перед ним
появляется на PPI. Два курса
акции теперь открыты для вас. Вы можете следовать процедуре, описанной для
вспомогательная система управления огнем, или
вы можете возобновить обычный поиск. Ваше решение, естественно, будет основано на
тактическая ситуация.
Два курса
акции теперь открыты для вас. Вы можете следовать процедуре, описанной для
вспомогательная система управления огнем, или
вы можете возобновить обычный поиск. Ваше решение, естественно, будет основано на
тактическая ситуация. Подшипники можно оценить
прямо из PPI.
Подшипники можно оценить
прямо из PPI.
 Если контакт
выполняется, следуйте процедурам, перечисленным для дальнего поиска. Если приступ
должно быть сделано на
цели, наведите радар управления огнем на контакт и возобновите
искать немедленно. Там
нет необходимости пытаться дублировать функцию РЛС управления огнем
с поисковой РЛС,
если только поисковый радар не требуется для решения проблемы торпеды, пока
РЛС управления огнем главной батареи занята.
Если контакт
выполняется, следуйте процедурам, перечисленным для дальнего поиска. Если приступ
должно быть сделано на
цели, наведите радар управления огнем на контакт и возобновите
искать немедленно. Там
нет необходимости пытаться дублировать функцию РЛС управления огнем
с поисковой РЛС,
если только поисковый радар не требуется для решения проблемы торпеды, пока
РЛС управления огнем главной батареи занята. любой
индикация неправильной станции
сразу станет очевидным в этой системе. Искать не должно
забыто при хранении
станции, и штатный план смещения шкал дальности и усиления приемника
следует принять. Прирост
следует отклонять только при получении необходимого содержания станции
Информация .
любой
индикация неправильной станции
сразу станет очевидным в этой системе. Искать не должно
забыто при хранении
станции, и штатный план смещения шкал дальности и усиления приемника
следует принять. Прирост
следует отклонять только при получении необходимого содержания станции
Информация . Если, однако,
местность постепенно поднимается от кромки воды до горы или горного хребта.
расстояние внутри страны,
существует вероятность, что значок на экране вашего радара был произведен
отражение от
горный массив, а не от пляжа.Практически невозможно
определить точную точку
отражение от наклонной поверхности и погрешность всего в несколько сотен
ярды могут оказаться
катастрофичен в тесной навигационной работе. Всегда держите контурную карту
близлежащая земля доступна для
ссылка, когда требуется навигационная информация. После осторожного
практика в «радарной карте»
сравнение с контурными картами знакомой местности, вы можете стать опытным
в оценке
отражающие поверхности на незнакомой местности. Это обсуждение относится к
конечно, к пилотированию, так как
радарные «вырезки» обычно будут отличаться от визуальных касательных, опять же в зависимости
по контуру
земельные участки.
Если, однако,
местность постепенно поднимается от кромки воды до горы или горного хребта.
расстояние внутри страны,
существует вероятность, что значок на экране вашего радара был произведен
отражение от
горный массив, а не от пляжа.Практически невозможно
определить точную точку
отражение от наклонной поверхности и погрешность всего в несколько сотен
ярды могут оказаться
катастрофичен в тесной навигационной работе. Всегда держите контурную карту
близлежащая земля доступна для
ссылка, когда требуется навигационная информация. После осторожного
практика в «радарной карте»
сравнение с контурными картами знакомой местности, вы можете стать опытным
в оценке
отражающие поверхности на незнакомой местности. Это обсуждение относится к
конечно, к пилотированию, так как
радарные «вырезки» обычно будут отличаться от визуальных касательных, опять же в зависимости
по контуру
земельные участки. Несколько иллюстраций покажут, почему это так.
Несколько иллюстраций покажут, почему это так.
 Хорошие и были диапазоны
пусть он идентифицирован таким образом. Он должен помнить,
Хорошие и были диапазоны
пусть он идентифицирован таким образом. Он должен помнить,
 Это означает, что выигрыш
контроль будет на
различное положение для работы «A» и PPI.
Это означает, что выигрыш
контроль будет на
различное положение для работы «A» и PPI. Это будет
благодаря диапазону красок
круги с интервалом в пять миль на стеклянной поверхности трубки PPI,
исключение использования
неудовлетворительная шкала дальности, которой снабжены эти агрегаты. Когда PPI не
доступные, диапазоны и
подшипники необходимо считывать «на лету» с помощью скотча.
шкала на шкале «А».
Это будет
благодаря диапазону красок
круги с интервалом в пять миль на стеклянной поверхности трубки PPI,
исключение использования
неудовлетворительная шкала дальности, которой снабжены эти агрегаты. Когда PPI не
доступные, диапазоны и
подшипники необходимо считывать «на лету» с помощью скотча.
шкала на шкале «А». операция связи с
он тесно связан с операцией поиска с близкого расстояния.
операция связи с
он тесно связан с операцией поиска с близкого расстояния.


 Хотя это значительно снижает эффективность воздушного поиска корабля, главное
должен быть отдан артиллеристу
когда самолеты приблизились к дальности атаки.
Хотя это значительно снижает эффективность воздушного поиска корабля, главное
должен быть отдан артиллеристу
когда самолеты приблизились к дальности атаки.