Спутниковые навигационные системы
В настоящее время в мире, помимо глобальных навигационных спутниковых систем ГЛОНАСС (Россия) и GPS (США), работы по развертыванию ГНСС БЕЙДОУ и ГАЛИЛЕО проводят Китай и страны Европейского союза. Япония и Индия разворачивают региональные навигационные спутниковые системы QZSS и IRNSS соответственно.
История развития ГНСС
Глобальные навигационные спутниковые системы
Архитектура штатных орбитальных группировок
|
|
|
| ||||||||||||||||||||||||||||||||||||||||||||||
ведутся НИР в рамках ФЦП | нет | ведутся НИР в рамках программы EGEP (2-е поколение) |
| ||||||||||||||||||||||||||||||||||||||||||||||
ведутся НИР в рамках ФЦП | нет | ведутся НИР в рамках программы EGEP (2-е поколение) |
| ||||||||||||||||||||||||||||||||||||||||||||||
 д.,
д.,Региональные навигационные спутниковые системы
Архитектура штатных орбитальных группировокКвазизенитный сегмент
| Геосинхронный сегмент
| ||||||||||||||||||||
|
|
О системе GPSИстория создания Global Positioning System (GPS) ведёт своё начало с 1973 г., когда Управление совместных программ,
входящее в состав Центра космических и ракетных исследований США, получило указание Министерства обороны США разработать, испытать и развернуть навигационную
систему космического базирования. Результатом данной работы стала система, получившая первоначальное название NAVSTAR (NAVigation System with Time And Ranging),
из которого прямо следовало, что система предназначена для решения двух главных задач – навигации, т. е. определения мгновенного положения и скорости потребителей,
и синхронизации шкал времени. Разработка концепции построения и архитектуры GPS заняла примерно 5 лет, и уже в 1974 году фирма Rockwell получила заказ на изготовление первых восьми космических аппаратов (КА) Block I для создания демонстрационной системы. Первый КА был запущен 22 февраля 1978, и в том же году Rockwell получила контракт на создание ещё четырёх КА. Первоначально предполагалось, что орбитальная группировка GPS будет насчитывать 24 КА в трёх орбитальных плоскостях высотой 20200 км и наклонением 63°. К моменту начала серийного производства в 1989 году космических аппаратов модификации Block II было принято решение об изменении параметров орбиты GPS, в частности, наклонение было изменено на 55°, а количество орбитальных плоскостей увеличено до 6. Выделяют два важных этапа развёртывания системы GPS – фазу первоначальной работоспособности (IOC) и фазу полной работоспособности (FOC). Этап IOC начался в 1993 году, когда в составе орбитальной группировки насчитывалось 24 КА различных модификаций (Block I/II/IIA), готовых к использованию по целевому назначению. Переход в режим FOC состоялся в июле 1995, после завершения всех лётных испытаний, хотя фактически система начала предоставлять услуги в полном объеме с марта 1994 года. Таким образом, GPS является полностью работоспособной уже в течение более чем двух десятилетий, при этом на протяжении всей своей истории GPS постоянно модернизировалась с целью удовлетворения требований различных категорий как гражданских, так и военных потребителей. При проектировании GPS предполагалось, что точность навигационных определений при использовании C/A-кода будет в пределах 400 м.
Реальная точность измерений по C/A-коду оказалась в 10 и более раз выше – 15-40 м ( Текущий третий этап модернизации GPS предполагает разработку и производство космических аппаратов следующего поколения Block III, которые в сочетании с усовершенствованным наземным комплексом управления и навигационной аппаратурой потребителей обеспечат улучшенные характеристики в части помехозащищённости, точности, доступности и целостности координатно-временного и навигационного обеспечения. Услуги системы GPSСистема GPS предоставляет два вида услуг:
Каждый космический аппарат излучает навигационные сигналы на нескольких несущих частотах. Квадратурные составляющие сигналов, передаваемых на каждой из несущих частот,
подвергаются фазовой манипуляции различными дальномерными псевдослучайными последовательностями (ПСП). Структура некоторых из этих ПСП опубликована, соответственно данный сигнал может приниматься
всеми потребителями. Структура другой части ПСП закрыта, поэтому данный сигнал доступен для приёма только санкционированным потребителям, которым структура ПСП известна. Услуга стандартного позиционирования SPS и временной синхронизации доступна для всех категорий потребителей безвозмездно и глобально и реализуется посредством излучения всеми космическими аппаратами GPS навигационных радиосигналов, модулированных дальномерным кодом C/A (Coarse/Acquisition – грубый приём). Код C/A представляет собой ПСП Голда длительностью 1 023 символа с тактовой частотой 1,023 МГц. Таким образом, ПСП C/A-кода имеет период повторения T = 1 мс, что соответствует интервалу однозначного измерения псевдодальности около 300 км. Программа развития GPS предусматривает предоставление гражданским потребителям услуги SPS с помощью сигналов L2C, L5 и L1C. Услуга точного позиционирования PPS реализуется посредством излучения всеми космическими аппаратами орбитальной группировки GPS навигационных радиосигналов в диапазонах L1 и L2, модулированных дальномерным P(Y)-кодом. Услуга PPS предназначена для использования исключительно вооружёнными силами США, федеральными агентствами США и вооружёнными силами некоторых союзников. Орбитальная группировкаШтатная орбитальная группировка GPS состоит из 32 основных космических аппаратов, расположенных на шести круговых орбитах, обозначаемых латинскими буквами от A до F. Дополнительно на некоторых орбитах может находиться один или два резервных КА, предназначенных для сохранения параметров системы при выходе из строя основных КА. Наклонение орбитальных плоскостей 55°, долготы восходящих узлов различаются на 60°. Высоте орбит 20 200 км соответствует период обращения 11 ч 58 мин, т. е. орбиты космических аппаратов GPS являются синхронными.
Текущее состояние ОГ GPS Типы космических аппаратовВ настоящее время восполнение орбитальной группировки осуществляется запуском космических аппаратов Block IIF («F» – follow on – продолжение). Основной задачей КА Block III является предоставление навигационных услуг с помощью нового навигационного радиосигнала L1C и повышение точности эфемеридно-временной информации, доступности навигационного радиосигнала, мощности излучения, а также увеличение срока активного существования.
Навигационные радиосигналыСпектр навигационных радиосигналов системы GPS
СТРУКТУРА ЦИ НАВИГАЦИОННЫХ РАДИОСИГНАЛОВ СИСТЕМЫ GPSВнедрение новых навигационных сигналов GPS сопровождается совершенствованием структуры цифровой информации и применением новых видов модуляции,
а также переходом от структуры навигационного сообщения типа NAV на структуры типа CNAV и CNAV-2. Навигационные сообщение типа CNAV являются усовершенствованными версиями навигационного сообщения NAV, позволяющие точнее передавать оперативную и неоперативную информацию о состоянии GPS. В навигационном сообщении CNAV содержится информация того же типа, что и в сообщении NAV (текущее время, признаки состояния КА, эфемеридно-временная информация, альманах системы и т.п.), однако эта информация передается в новом формате. Вместо использования архитектуры суперкадров/кадров сообщение передается в виде пакетов различной длительности. Наиболее существенными изменениями структуры CNAV являются расширение количества космических аппаратов используемых по целевому назначению с 32 до 63, а также возможность оперативно передать данные о работоспособности конкретного аппарата (целостности) с задержкой менее 6 с. Система координат и шкала времениСистема координатВ GPS используется Всемирная геодезическая система 1984 года (World Geodetic System – WGS-84). Очередное уточнение параметров системы WGS-84 (G1678) состоялось в 2012 году, при этом расхождения между действующей системой WGS-84 и ITRF 2008 составляет величину порядка 1 см, т. е. обе системы являются фактически идентичными.
Система времениСистемное время GPS связано с координированным всемирным временем (UTC) в соответствии с наблюдениями морской обсерватории США (USNO).
Номинально шкала времени GPS имеет постоянное, равное 19 с, расхождение с международным атомным временем TAI. Наземный комплекс управленияУправление орбитальной группировкой GPS осуществляет 2-ая оперативная космическая эскадрилья Космического командования ВВС США. В настоящее время управление орбитальной группировкой GPS осуществляет наземный комплекс управления 2 поколения (Operational Control Segment — OCS), который включает в себя: Главный центр управления системой GPS на базе ВВС Шривер
Резервный центр управления системой GPS
Станции мониторинга Национального агентства геопространственной разведки
Глобальную сеть закладочно-измерительных станций
Станции мониторинга GPS ВВС США
Запросные станции GPS L-диапазона Наземный комплекс управления GPS реализует беззапросную технологию эфемеридно-временного обеспечения. Глобальная сеть командно-измерительных станций позволяет производить закладку информации на борт с периодичностью 4 — 6 ч. Интерфейсный контрольный документИнтерфейсный контрольный документ GPS: www.gps.gov/technical/icwg/ Официальный сайтОфициальный сайт системы GPS: www.gps.gov Пользовательский информационный центр GPS: www.navcen.uscg.gov Наверх |

 Возможность получения такой точности измерений с помощью несложной коммерческой АП вызвала в США опасения, что сигналы GPS могут быть использованы потенциальным противником, в том числе в системах высокоточного оружия.
В качестве защитной меры, начиная с космического аппарата Block II, в GPS были реализованы два метода преднамеренной деградации (загрубления) точности навигационно-временного обеспечения гражданских потребителей –
селективный доступ и одновременно принятые меры по защите от так называемых уводящих помех.
Деактивация режима селективного доступа была осуществлена 2 мая 2000 г. около 4:00 (UT). Точность автономной навигации возросла почти в 10 раз, что дало гигантский импульс к развитию прикладных навигационных технологий.
Возможность получения такой точности измерений с помощью несложной коммерческой АП вызвала в США опасения, что сигналы GPS могут быть использованы потенциальным противником, в том числе в системах высокоточного оружия.
В качестве защитной меры, начиная с космического аппарата Block II, в GPS были реализованы два метода преднамеренной деградации (загрубления) точности навигационно-временного обеспечения гражданских потребителей –
селективный доступ и одновременно принятые меры по защите от так называемых уводящих помех.
Деактивация режима селективного доступа была осуществлена 2 мая 2000 г. около 4:00 (UT). Точность автономной навигации возросла почти в 10 раз, что дало гигантский импульс к развитию прикладных навигационных технологий.
 В соответствии с действующими планами КА Block IIF должны сменить на орбите КА Block IIA, КА Block III придут на смену Block IIR («R» – replacement – замена).
В соответствии с действующими планами КА Block IIF должны сменить на орбите КА Block IIA, КА Block III придут на смену Block IIR («R» – replacement – замена).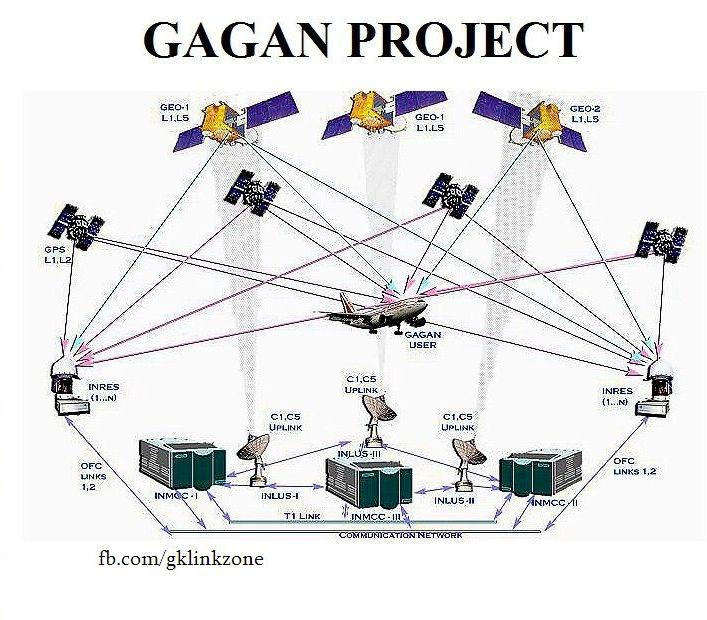
 Отсчёт времени ведётся в неделях GPS и секундах в рамках текущей недели, начало отсчёта – 00 ч 00 мин 06.01.1980.
В системе GPS номер недели записывается с помощью 10-разрядного двоичного числа, максимальное значение номера недели равно 1 023.
Нулевой номер недели повторился в полночь с 21 на 22 августа 1999 г.
Отсчёт времени ведётся в неделях GPS и секундах в рамках текущей недели, начало отсчёта – 00 ч 00 мин 06.01.1980.
В системе GPS номер недели записывается с помощью 10-разрядного двоичного числа, максимальное значение номера недели равно 1 023.
Нулевой номер недели повторился в полночь с 21 на 22 августа 1999 г.О системе БЭЙДОУИдея создания китайской национальной региональной навигационной системы была предложена в 1983 году. Концепция системы, использующей два геостационарных космических аппарата
(рабочее название системы Twinsat), прошла экспериментальную проверку в 1989 г. Эксперимент проводился на базе двух связных космических аппаратов DFH-2/2A, уже находившихся
на орбите. Первый этап создания системы БЭЙДОУ (Beidou – Северный Ковш – китайское название созвездия Большой Медведицы) был начат в 1994 году. В 2000 году было запущено два геостационарных спутника: космический аппарат (КА) Beidou-1A (30 октября 2000) и Beidou-1B (20 декабря 2000). Аппараты системы Beidou-1 построены на базе связной геостационарной платформы DFH-3. 15 декабря 2003 китайская система БЭЙДОУ первого поколения была сдана в эксплуатацию. Запуск третьего геостационарного спутника Beidou-1C в 2003 году улучшил эксплуатационные характеристики системы. Развитие системы БЭЙДОУ второго поколения БЭЙДОУ-2 началось в 2004 году. К концу 2012 года было запущено еще 14 спутников (5 геостационарных спутников, 5 спутников на наклонной геосинхронной орбите (ГСНО) и 4 спутника на средних орбитах), что позволило завершить развертывание орбитальной группировки. БЭЙДОУ-2 была разработана по принципу совместимости с БЭЙДОУ-1, с применением схемы пассивного позиционирования, что позволяло ей обеспечивать пользователей в странах Азиатско-тихоокеанского региона услугами определения местоположения, скорости, времени, широкодиапазонных дифференциальных поправок и отправки коротких сообщений. Третий этап – это создание системы третьего поколения БЭЙДОУ-3, начат в 2009 году. Основной целью является обеспечение к 2018 году основных услуг для пользователей, находящихся на территории и акватории обоих Шелковых путей (сухопутного и водного), а также соседних регионов, и завершение развертывания орбитальной группировки из 35 КА, предназначенной для обеспечения услугами пользователей глобально к 2020 году. Услуги системы БЭЙДОУСистема БЭЙДОУ будет предоставлять два вида глобальных и два вида региональных услуг. Глобальными услугами являются услуги с открытым и санкционированным доступом. Региональные услуги — это услуга широкозонной дифференциальной коррекции и услуга передачи коротких сообщений. Орбитальная группировкаКосмический сегмент БЭЙДОУ представляет собой орбитальную группировку смешанного типа, состоящую из КА на орбитах 3 типов.
Типы космических аппаратов
Навигационные радиосигналыКосмические аппараты системы БЭЙДОУ-2, находящейся в эксплуатации, передают сигналы B1 и B2, что позволяет предоставлять открытые бесплатные услуги в Азиатско-Тихоокеанском регионе. После запуска в 2015 году КА нового поколения руководство программой БЭЙДОУ сообщило об изменении структуры навигационного сигнала B1: смещение центральной частоты c 1561,098 МГц на 1575,42 МГц (как у гражданских сигналов GPS L1 и Galileo E1) и изменение модуляции QPSK на MBOC (аналогичную модуляции будущего сигнала GPS L1C и Galileo E1). Это направлено на обеспечение взаимодополняемости системы БЭЙДОУ c ГНСС ГАЛИЛЕО и GPS. Спектр навигационных радиосигналов системы БЭЙДОУ
Структура ЦИ навигационных радиосигналов системы БЭЙДОУСистема координат и шкала времениСистема координатПараметры движения КА БЭЙДОУ передаются в китайской геодезической системе координат 2000 г.
Система времениВ качестве шкалы времени системы определено китайское универсальное глобальное время, которое поддерживается атомными стандартами частоты, установленными в центре управления в Пекине. Время системы БЭЙДОУ (BDT) связано с координированным всемирным временем (UTC) и синхронизировано с ним с точностью 100 нс. Началом отсчёта BDT является 0 ч 0 мин 1 января 2006 (UTC). По заявлению создателей системы, предусмотрена совместимость BDT со временем GPS/Galileo. Расхождение между шкалами времени GPST/GST измеряется и передаётся. Наземный комплекс управленияНаземный комплекс управления БЭЙДОУ построен по классической централизованной схеме: сеть беззапросных измерительных станций формирует отсчёты первичных измерений навигационных параметров радиосигналов навигационных космических аппаратов и передаёт их в центр управления системой, в котором формируется информация, закладываемая на борт космических аппаратов посредством специальных земных станций. Сеть беззапросных измерительных станций БЭЙДОУ также располагается на территории Китая. Интерфейсный контрольный документИнтерфейсный контрольный документ БЭЙДОУ: http://www.beidou.gov.cn/xt/gfxz/ Официальный сайтПользовательский информационный центр БЭЙДОУ: www.beidou.gov.cn Наверх | ||||||


 Предполагается излучение навигационных радиосигналов в трёх частотных диапазонах B1, B2 и B3, расположенных в тех же областях L-диапазона, что и сигналы других ГНСС.
Предполагается излучение навигационных радиосигналов в трёх частотных диапазонах B1, B2 и B3, расположенных в тех же областях L-диапазона, что и сигналы других ГНСС. (China Geodetic Coordinate System 2000 – CGCS2000).
Центр данной системы координат совпадает с центром масс Земли. Ось Z направлена на опорный полюс Международной службы вращения Земли (IERS Reference Pole),
ось X – из центра системы координат в точку пересечения опорного меридиана Международной службы вращения Земли (IERS Reference Meridian) и плоскости, перпендикулярной оси Z. Ось Y дополняет данную систему координат до правой тройки.
(China Geodetic Coordinate System 2000 – CGCS2000).
Центр данной системы координат совпадает с центром масс Земли. Ось Z направлена на опорный полюс Международной службы вращения Земли (IERS Reference Pole),
ось X – из центра системы координат в точку пересечения опорного меридиана Международной службы вращения Земли (IERS Reference Meridian) и плоскости, перпендикулярной оси Z. Ось Y дополняет данную систему координат до правой тройки. Долгосрочная стратегия развития системы предполагает создание
глобальной сети станций для повышения точностных характеристик навигационных услуг системы БЭЙДОУ.
Долгосрочная стратегия развития системы предполагает создание
глобальной сети станций для повышения точностных характеристик навигационных услуг системы БЭЙДОУ.Принципы спутниковой навигации
Космический сегмент
Космический сегмент, состоящий из навигационных спутников, представляет собой совокупность источников радионавигационных сигналов, передающих одновременно значительный объем служебной информации. Основные функции каждого спутника — формирование и излучение радиосигналов, необходимых для навигационных определений потребителей и контроля бортовых систем спутника.
Наземный сегмент
В состав наземного сегмента входят космодром, командно-измерительный комплекс и центр управления. Космодром обеспечивает вывод спутников на требуемые орбиты при первоначальном развертывании навигационной системы, а также периодическое восполнение спутников по мере их выхода из строя или выработки ресурса. Главными объектами космодрома являются техническая позиция и стартовый комплекс. Техническая позиция обеспечивает прием, хранение и сборку ракет-носителей и спутников, их испытания, заправку и состыковку. В число задач стартового комплекса входят: доставка носителя с навигационным спутником на стартовую площадку, установка на пусковую систему, предполетные испытания, заправка носителя, наведение и пуск.
Командно-измерительный комплекс служит для снабжения навигационных спутников служебной информацией, необходимой для проведения навигационных сеансов, а также для контроля и управления ими как космическими аппаратами.
Центр управления, связанный информационными и управляющими радиолиниями с космодромом и командно-измерительным комплексом, координирует функционирование всех элементов спутниковой навигационной системы.
Пользовательский сегмент
В пользовательский сегмент входит аппаратура потребителей. Она предназначается для приема сигналов от навигационных спутников, измерения навигационных параметров и обработки измерений. Для решения навигационных задач в аппаратуре потребителя предусматривается специализированный встроенный компьютер. Разнообразие существующей аппаратуры потребителей обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Современная спутниковая навигация основывается на использовании принципа беззапросных дальномерных измерений между навигационными спутниками и потребителем. Это означает, что потребителю передается в составе навигационного сигнала информация о координатах спутников. Одновременно (синхронно) производятся измерения дальностей до навигационных спутников. Способ измерений дальностей основывается на вычислении временных задержек принимаемого сигнала от спутника по сравнению с сигналом, генерируемым аппаратурой потребителя.
На рисунке приведена схема определений местоположения потребителя с координатами x, y, z на основе измерений дальности до четырех навигационных спутников. Цветными яркими линиями показаны окружности, в центре которых расположены спутники. Радиусы окружностей соответствуют истинным дальностям, т.е. истинным расстояниям между спутниками и потребителем. Цветные неяркие линии – это окружности с радиусами, соответствующими измеренным дальностям, которые отличаются от истинных и поэтому называются псевдодальностями. Истинная дальность отличается от псевдодальности на величину, равную произведению скорости света на уход часов b, т.е. величину смещения часов потребителя по отношению к системному времени. На рисунке показан случай, когда уход часов потребителя больше нуля – то есть часы потребителя опережают системное время, поэтому измеренные псевдодальности меньше истинных дальностей.
В идеальном варианте, когда измерения производятся точно и показания часов спутников и потребителя совпадают для определения положения потребителя в пространстве достаточно произвести измерения до трех навигационных спутников.
В действительности показания часов, которые входят в состав навигационной аппаратуры потребителя, отличаются от показаний часов на борту навигационных спутников. Тогда для решения навигационной задачи к неизвестным ранее параметрам (три координаты потребителя) следует добавить еще один — смещение между часами потребителя и системным временем. Отсюда следует, что в общем случае для решения навигационной задачи потребитель должен «видеть», как минимум, четыре навигационных спутника.
Для функционирования навигационных спутниковых систем необходимы данные о параметрах вращения Земли, фундаментальные эфемериды Луны и планет, данные о гравитационном поле Земли, о моделях атмосферы, а также высокоточные данные об используемых системах координат и времени.
Геоцентрические системы координат — системы координат, начало которых совпадает с центром масс Земли. Их также называют общеземными или глобальными.
Для построения и поддержания общеземных систем координат используются четыре основных метода космической геодезии:
- радиоинтерферометрия со сверхдлинной базой (РСДБ),
- лазерная локация космических аппаратов (SLR),
- доплеровские измерительные системы (DORIS),
- навигационные измерения космических аппаратов ГЛОНАСС и других ГНСС.
Международная земная система координат ITRF является эталоном земной системы координат.
В современных навигационных спутниковых системах используются различные, как правило национальные, системы координат.
| Навигационная система | Система координат |
|---|---|
| Система координат ГЛОНАСС | ПЗ-90 (Параметры Земли 1990 года) |
| Система координат GPS | WGS-84 (World Geodetic System) |
| Система координат ГАЛИЛЕО | GTRF (Galileo Terrestrial Referenfce Frame) |
| Система координат БЕЙДОУ | CGCS2000 (China Geodetic Coordinate System 2000) |
| Система координат QZSS | JGS (Japanese geodetic system) |
| Система координат NavIC | WGS-84 (World Geodetic System) |
В соответствии с решаемыми задачами применяются два типа систем времени: астрономические и атомные.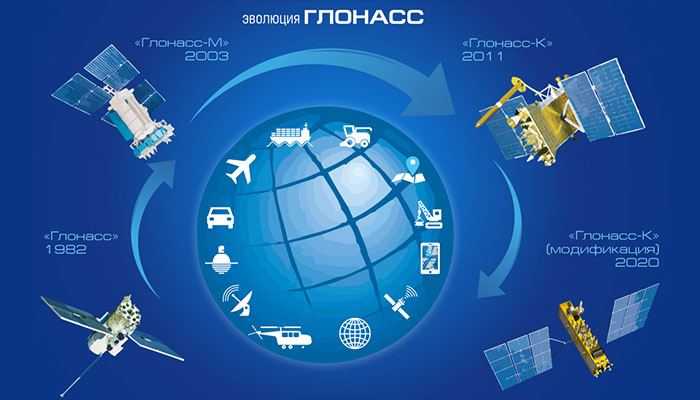
Системы астрономического времени основаны на суточном вращении Земли. Эталоном для построения шкал астрономического времени служат солнечные или звездные сутки, в зависимости от точки небесной сферы, по которой производится измерение времени.
Всемирное время UT (Universal Time) – это среднее солнечное время на гринвическом меридиане.
Всемирное координированное время UTC синхронизировано с атомным временем и является международным стандартом, на котором базируется гражданское время.
Атомное время (TAI) — время, в основу измерения которого положены электромагнитные колебания, излучаемые атомами или молекулами при переходе из одного энергетического состояния в другое. В 1967 году на Генеральной конференции мер и весов атомная секунда представляет собой переход между сверхтонкими уровнями F=4, M=0 и F=3, M=0 основного состояния 2S1/2 атома цезия-133, не возмущённого внешними полями, и что частоте этого перехода приписывается значение 9 192 631 770 Герц.
Спутниковая радионавигационная система является пространственно-временной системой с зоной действия, охватывающей всё околоземное пространство, и функционирует в собственном системном времени. Важное место в ГНСС отводится проблеме временной синхронизации подсистем. Временная синхронизация важна и для обеспечения заданной последовательности излучения сигналов всех навигационных спутников. Она обусловливает возможность применения пассивных дальномерных (псевдодальномерных) методов измерений. Наземный командно-измерительный комплекс обеспечивает синхронизацию шкал времени всех навигационных КА путем их сверки и коррекции (непосредственной и алгоритмической).
Навигационных радиосигналы
При выборе типов и параметров сигналов, используемых в спутниковых радионавигационных системах, учитывается целый комплекс требований и условий. Сигналы должны обеспечивать высокую точность измерения времени прихода (задержки)
сигнала и его доплеровской частоты и высокую вероятность правильного декодирования навигационного сообщения. Также сигналы должны иметь низкий уровень взаимной корреляции для того,
чтобы сигналы разных навигационных космических аппаратов надежно различались навигационной аппаратурой потребителей. Кроме того, сигналы ГНСС должны максимально эффективно использовать отведенную
полосу частот при малом уровне внеполосного излучения, обладать высокой помехоустойчивостью.
Также сигналы должны иметь низкий уровень взаимной корреляции для того,
чтобы сигналы разных навигационных космических аппаратов надежно различались навигационной аппаратурой потребителей. Кроме того, сигналы ГНСС должны максимально эффективно использовать отведенную
полосу частот при малом уровне внеполосного излучения, обладать высокой помехоустойчивостью.
Почти все существующие навигационные спутниковые системы, за исключением индийской системы NAVIC, используют для передачи сигналов диапазон L. Система NAVIC будет излучать сигналы дополнительно и в S диапазоне.
Диапазоны, занимаемые различными навигационными спутниковыми системами
Виды модуляции
По мере развития спутниковых навигационных систем изменялись используемые виды модуляции радиосигналов.
В большинстве навигационных систем изначально использовались исключительно сигналы с бинарной (двухпозиционной)
фазовой модуляцией – ФМ-2 (BPSK). В настоящее время в спутниковой навигации начался переход к новому классу модулирующих функций,
получивших название BOC (Binary Offset Carrier)-сигналов.
Принципиальное отличие BOC-сигналов от сигналов с ФМ-2 состоит в том, что символ модулирующей ПСП BOC-сигнала представляет собой не прямоугольный видеоимпульс, а отрезок меандрового колебания, включающий в себя некоторое постоянное число периодов k. Поэтому сигналы с BOC-модуляцией часто называют меандровыми шумоподобными сигналами.
Использование сигналов с BOC-модуляцией повышает потенциальную точность измерения и разрешающую способность по задержке. Одновременно с этим, уменьшается уровень взаимных помех при совместном функционировании навигационных систем, использующих традиционные и новые сигналы.
Каждый спутник принимает с наземных станций управления навигационную информацию, которая передается обратно пользователям в составе навигационного сообщения.
Навигационное сообщение содержит разные типы информации, необходимые для того, чтобы определить местоположение пользователя и синхронизовать его шкалу времени с национальным эталоном.
Типы информации навигационного сообщения
- Эфемеридная информация, необходимая для вычисления координат спутника с достаточной точностью
- Погрешность расхождения бортовой шкалы времени относительно системной шкалы времени для учета смещения времени космического аппарата при навигационных измерениях
- Расхождение между шкалой времени навигационной системы и национальной шкалой времени, для решения задачи синхронизации потребителей
- Признаки пригодности с информацией о состоянии спутника для оперативного исключения спутников с выявленными отказами из навигационного решения
- Альманах с информацией об орбитах и состоянии всех аппаратов в группировке для долгосрочного грубого прогноза движения спутников и планирования измерений
- Параметры модели ионосферы, необходимые одночастотным приемникам для компенсации погрешностей навигационных измерений, связанных с задержкой распространения сигналов в ионосфере
- Параметры вращения Земли для точного пересчета координат потребителя в разных системах координат
Признаки пригодности обновляются в течение нескольких секунд при обнаружении отказа. Параметры эфемерид и времени, как правило, обновляются не чаще, чем раз в полчаса. При этом период обновления для разных систем сильно отличается и может достигать четырех часов, в то время как альманах обновляется не чаще, чем раз в день.
По своему содержанию навигационное сообщение подразделяется на оперативную и неоперативную информацию и передается в виде потока цифровой информации (ЦИ).
Изначально во всех навигационных спутниковых системах использовалась структура вида «суперкадр/кадр/строка/слово». При этой структуре поток ЦИ формируется в виде непрерывно повторяющихся суперкадров,
суперкадр состоит из нескольких кадров, кадр состоит из нескольких строк.
В соответствии со структурой «суперкадр/кадр/строка/слово» формировались сигналы системы БЕЙДОУ, ГАЛИЛЕО (кроме E6), GPS (LNAV данные, L1), сигналы ГЛОНАСС с частотным разделением. В зависимости от системы, размеры суперкадров, кадров и строк могут отличаться, но принцип формирования остается похожим.
В зависимости от системы, размеры суперкадров, кадров и строк могут отличаться, но принцип формирования остается похожим.
Сейчас в большинстве сигналов используется гибкая строковая структура. В этой структуре навигационное сообщение формируется в виде переменного потока строк различных типов. Каждый тип строки имеет свою уникальную структуру и содержит определённый тип информации (указаны выше). НАП выделяет из потока очередную строку, определяет её тип и в соответствии с типом выделяет информацию, содержащуюся в этой строке.
Гибкая строковая структура навигационного сообщения позволяет значительно более эффективно использовать пропускную способность канала передачи данных.
Но главным достоинством навигационного сообщения с гибкой строковой структурой является возможность её эволюционной
модернизации при соблюдении принципа обратной совместимости. Для этого в ИКД для разработчиков НАП специально указывается,
что если НАП в навигационном сообщении встречает строки неизвестных ей типов, то она должна их игнорировать. Это позволяет добавлять
в процессе модернизации ГНСС к ранее существовавшим типам строк строки с новыми типами. НАП, выпущенная ранее, игнорирует строки с новыми типами и,
следовательно, не использует те новации, которые вводятся в процессе модернизации ГНСС, но при этом её работоспособность не нарушается.
Сообщения сигналов ГЛОНАСС с кодовым разделением имеют строковую структуру.
На точность определения потребителем своих координат, скорости движения и времени влияет множество факторов, которые можно разделить на категории:
- Системные погрешности, вносимые аппаратурой космического комплекса
Погрешности, связанные с функционированием бортовой аппаратуры спутника и наземного комплекса управления ГНСС обусловлены в основном несовершенством частотно-временного и эфемеридного обеспечения.

- Погрешности, возникающие на трассе распространения сигнала от космического аппарата до потребителя
Погрешности обусловлены отличием скорости распространения радиосигналов в атмосфере Земли от скорости их распространения в вакууме, а также зависимостью скорости от физических свойств различных слоёв атмосферы.
- Погрешности, возникающие в аппаратуре потребителя
Аппаратурные погрешности подразделяются на систематическую погрешность аппаратурной задержки радиосигнала в АП и флуктуационные погрешности, обусловленные шумами и динамикой потребителя.

Кроме того, на точность навигационно-временного определения существенно влияет взаимное расположение навигационных спутников и
потребителя.
Количественной характеристикой погрешности определения местоположения и поправки показаний часов, связанной с особенностями пространственного положения спутника и потребителя, служит так
называемый геометрический фактор ΓΣ или коэффициент геометрии. В англоязычной литературе используется обозначение GDOP — Geometrical delusion of precision.
Геометрический фактор ΓΣ показывает, во сколько раз происходит уменьшение точности измерений и зависит от следующих параметров:
- Гп — геометрический фактор точности определения местоположения потребителя ГНСС в пространстве.
Соответствует PDOP — Position delusion of precision. - Гг — геометрический фактор точности определения местоположения потребителя ГНСС по горизонтали.
Соответствует HDOP — Horizontal delusion of precision. - Гв — геометрический фактор точности определения местоположения потребителя ГНСС по вертикали.
Соответствует VDOP — Vertical delusion of precision. - Гт — геометрический фактор точности определения поправки показаний часов потребителя ГНСС.
Соответствует TDOP — Time delusion of precision.
Существующие в настоящее время глобальные навигационные спутниковые системы (ГНСС) GPS и ГЛОНАСС позволяют удовлетворить потребности в навигационном обслуживании обширный круг потребителей.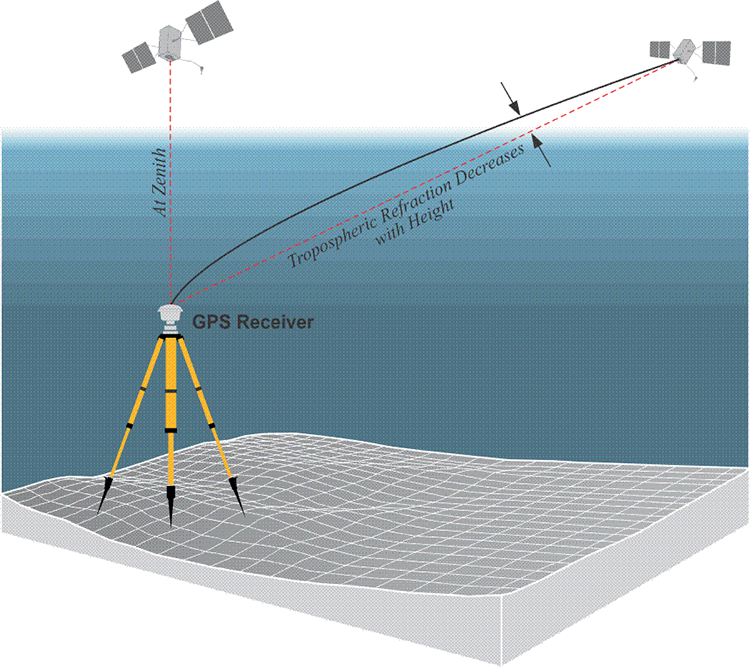 Но существует ряд задач, которые требуют высоких точностей навигации. К этим задачам относятся: взлет, заход на посадку и посадка самолетов, судовождение в прибрежных водах, навигация вертолетов и автомобилей и другие.
Но существует ряд задач, которые требуют высоких точностей навигации. К этим задачам относятся: взлет, заход на посадку и посадка самолетов, судовождение в прибрежных водах, навигация вертолетов и автомобилей и другие.
Классическим методом повышения точности навигационных определений является использование дифференциального (относительного) режима определений.
Дифференциальный режим предполагает использование одного или более базовых приёмников, размещённых в точках с известными координатами, которые одновременно с приёмником потребителя (подвижным, или мобильным) осуществляют приём сигналов одних и тех же спутников.
Повышение точности навигационных определений достигается за счёт того, что ошибки измерения навигационных параметров потребительского и базовых приёмников являются коррелированными. При формировании разностей измеряемых параметров большая часть таких погрешностей компенсируется.
В основе дифференциального метода лежит знание координат опорной точки – контрольно-корректирующей станции (ККС) или системы опорных станций, относительно которых могут быть вычислены поправки к определению псевдодальностей до навигационных спутников. Если эти поправки учесть в аппаратуре потребителя, то точность расчета, в частности, координат может быть повышена в десятки раз.
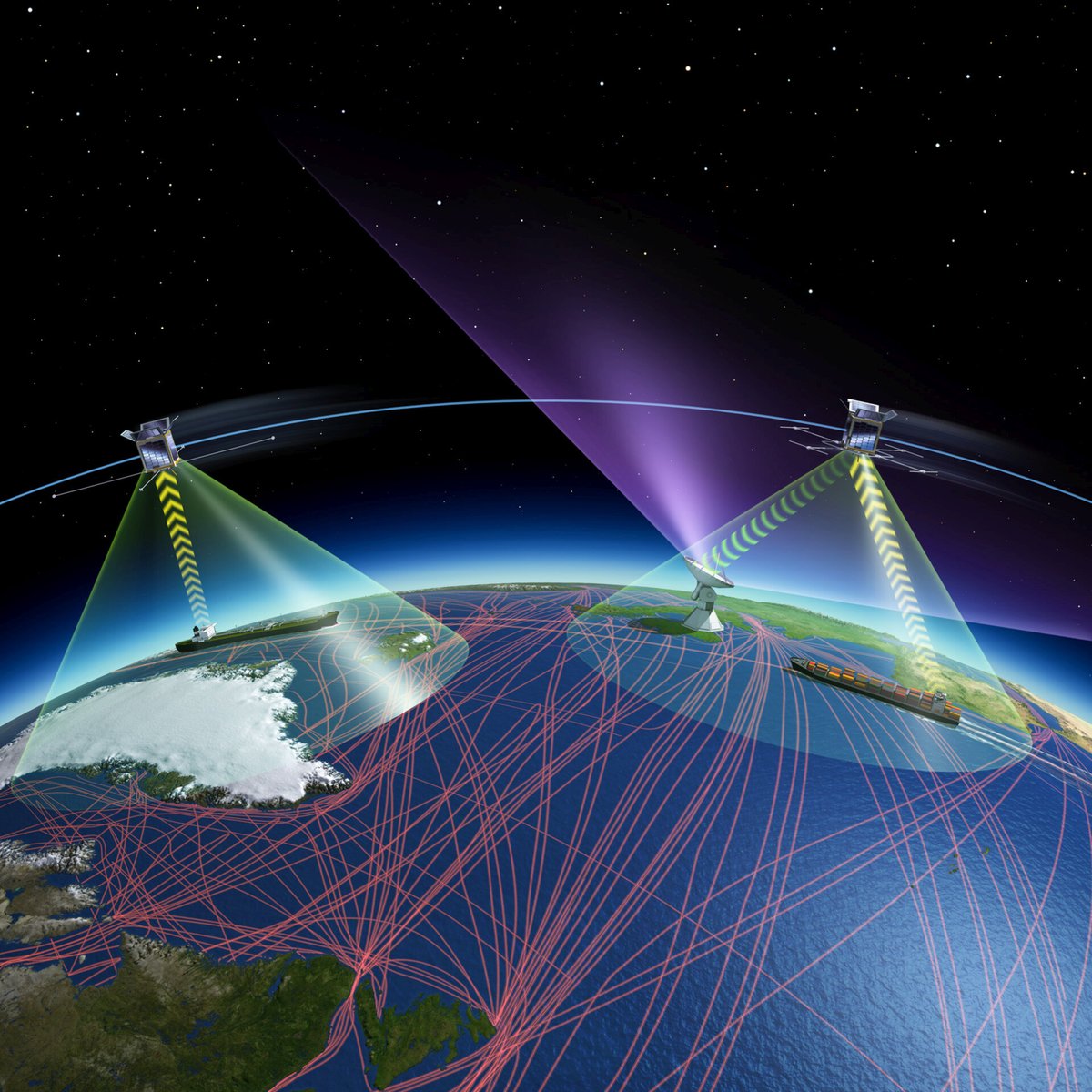
Для обеспечения дифференциального режима для большого региона – например, для России, стран Европы, США — передача корректирующих дифференциальных поправок осуществляется при помощи геостационарных спутников. Системы, реализующие такой подход, получили название широкозонные дифференциальные системы.
Подробнее о системах функциональных дополнений ГНСС, которые предоставляют потребителям дополнительную корректирующую информацию, смотрите в разделе «Функциональные дополнения».
НаверхСистемы спутникового мониторинга: GPS/Глонасс мониторинг — ТраспортМониторинг
Что такое спутниковый мониторинг?
Спутниковый мониторинг – это постоянное централизованное дистанционное наблюдение за текущим местоположением и состоянием объектов. Система предназначается для слежения за движением и состоянием частных лиц и автотранспорта, а также оперативного реагирования в случае возникновения нежелательных событий.
Система предназначается для слежения за движением и состоянием частных лиц и автотранспорта, а также оперативного реагирования в случае возникновения нежелательных событий.
Основные возможности спутникового мониторинга автотранспорта и физических лиц:
• Мониторинг местоположения транспортных средств, водителей, торговых представителей, перевозимых грузов в режиме реального времени;
• Отображение местоположения, направления движения и состояния транспортного средства на электронной карте, в виде передачи данных видеонаблюдения, в виде информационных сообщений;
• Определение состояния автотранспорта, работы специальных систем и оборудования на основе показаний датчиков;
• Отображение сигналов «тревоги»;
• Связь с водителем и многое другое.
к началу
На каких технологиях основана работа Системы транспортного мониторинга?
Система транспортного мониторинга – это аппаратно-программный комплекс, основанный на использовании следующих информационно-телекоммуникационных технологий:
• спутникового позиционирования ГЛОНАСС и GPS;
• сотовой связи GSM;
• УКВ-связи;
• интернет;
• вычислительной техники и микроэлектроники.
к началу
Как работают системы спутникового позиционирования ГЛОНАСС и GPS?
Идея создания спутниковой навигации родилась ещё в 50-е годы. В тот момент, когда СССР был запущен первый искусственный спутник Земли, американские учёные обнаружили, что частота принимаемого сигнала увеличивается при приближении спутника и уменьшается при его отдалении. Суть открытия заключалась в том, что если точно знать свои координаты на Земле, то становится возможным измерить положение и скорость спутника, и наоборот, точно зная положение спутника, можно определить собственную скорость и координаты.
Реализована эта идея была через 20 лет. В 1973 году была инициирована программа DNSS, позже переименованная в Navstar-GPS и затем в GPS (Global Positioning System). Первый тестовый спутник выведен на орбиту 14 июля 1974 г США. Последний из 24 спутников, необходимых для полного покрытия земной поверхности, был выведен на орбиту в 1993 г., после чего стало возможным использовать систему GPS для слежения и точного позиционирования неподвижных, а затем и подвижные объектов в воздухе и на земле. 24 спутника обеспечивают 100% работоспособность системы в любой точке земного шара, но не всегда могут обеспечить уверенный прием и хороший расчет позиции. Поэтому для увеличения точности и на случай отключения общее число спутников поддерживается в большем количестве – 30-32 спутника. Информация в C/A коде (стандартной точности) распространяется бесплатно. Военное применение (точность выше на порядок) обеспечивается зашифрованным кодом.
Первый тестовый спутник выведен на орбиту 14 июля 1974 г США. Последний из 24 спутников, необходимых для полного покрытия земной поверхности, был выведен на орбиту в 1993 г., после чего стало возможным использовать систему GPS для слежения и точного позиционирования неподвижных, а затем и подвижные объектов в воздухе и на земле. 24 спутника обеспечивают 100% работоспособность системы в любой точке земного шара, но не всегда могут обеспечить уверенный прием и хороший расчет позиции. Поэтому для увеличения точности и на случай отключения общее число спутников поддерживается в большем количестве – 30-32 спутника. Информация в C/A коде (стандартной точности) распространяется бесплатно. Военное применение (точность выше на порядок) обеспечивается зашифрованным кодом.
ГЛОбальная НАвигационная Спутниковая Система (ГЛОНАСС) — российская спутниковая навигационная система. Основой системы являются 24 спутника, движущихся над поверхностью Земли. Первый спутник ГЛОНАСС был выведен Советским Союзом на орбиту 12 октября 1982 года. 24 сентября 1993 года система была официально принята в эксплуатацию с орбитальной группировкой из 12 спутников. Для определения пространственных координат и точного времени требуется принять и обработать навигационные сигналы не менее чем от 4-х спутников ГЛОНАСС. По состоянию на 01.04.2011 г. в составе орбитальной группировки системы ГЛОНАСС насчитывается 26 космических аппаратов «Глонасс-М», из них 22 используются по целевому назначению и четыре временно выведены на техобслуживание.
Распоряжением Президента Российской Федерации от 18 февраля 1999 г. № 38-рп система ГЛОНАСС определена как система двойного назначения, применяемая не только в интересах обороны и безопасности РФ, но и в социально-экономических целях. Таким образом, было положено начало «гражданской» ГЛОНАСС. Федеральное космическое агентство (Роскосмос) является координатором, и вместе с другими министерствами и ведомствами выступает в качестве государственного заказчика по Федеральной Целевой Программе «Глобальная навигационная система».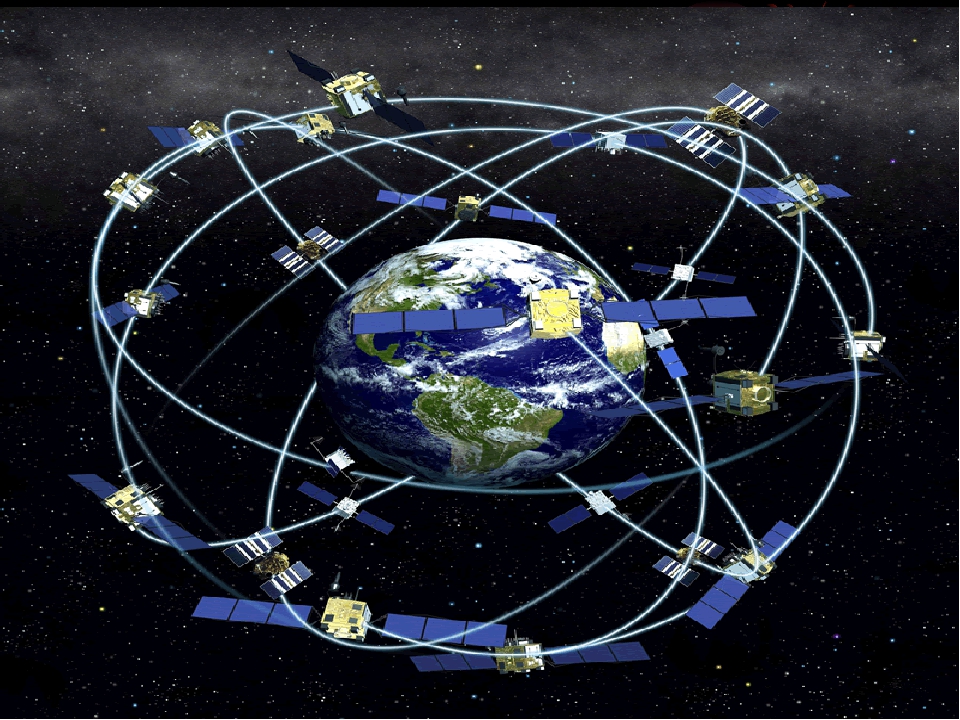 Эта программа направлена на дальнейшее развитие и эффективное использование глобальной навигационной спутниковой системы ГЛОНАСС за счет внедрения передовых технологий спутниковой навигации в интересах социально-экономического развития страны и обеспечения национальной безопасности, а также сохранения Россией лидирующих позиций в области спутниковой навигации. В настоящее время происходит активная коммерциализация технологий ГЛОНАСС. Заинтересованность руководства РФ в развитии отечественной навигационной системы способствует созданию массового навигационного рынка услуг и оборудования.
Эта программа направлена на дальнейшее развитие и эффективное использование глобальной навигационной спутниковой системы ГЛОНАСС за счет внедрения передовых технологий спутниковой навигации в интересах социально-экономического развития страны и обеспечения национальной безопасности, а также сохранения Россией лидирующих позиций в области спутниковой навигации. В настоящее время происходит активная коммерциализация технологий ГЛОНАСС. Заинтересованность руководства РФ в развитии отечественной навигационной системы способствует созданию массового навигационного рынка услуг и оборудования.
Спутники системы ГЛОНАСС, как и GPS, непрерывно излучают навигационные сигналы двух типов: навигационный сигнал стандартной точности (СТ) и навигационный сигнал высокой точности (ВТ). Информация, предоставляемая навигационным сигналом СТ, доступна всем потребителям и позволяет определять:
• горизонтальные координаты с точностью 50-70 м
• вертикальные координаты с точностью 70 м
• составляющие вектора скорости с точностью 15 см/с
• точное время с точностью 0,7 мкс
По своим характеристикам и принципам построения системы GPS и ГЛОНАСС схожи, однако имеют немного разные технологии в основе, что позволяет говорить об отсутствии заимствования. В настоящее время система GPS – это 29 активных спутников, ГЛОНАСС – 22, в сумме 51 спутник. Приемники, использующие данные всех спутников будут надежнее и точнее — в этом и состоит практический результат применения двух систем – ГЛОНАСС и GPS.
к началу
Как система ГЛОНАСС/ GPS мониторинга работает?
На транспортное средство (автомобиль, либо другой объект наблюдения) устанавливается специальное навигационное ГЛОНАСС/GPS оборудование (GPS-маячок, GPS-трекер, бортовой терминал, GPS-контроллер). Терминал автоматически определяет местоположение, скорость и направление движения автотранспорта c помощью приемника спутниковых навигационных систем ГЛОНАСС или GPS, а кроме того, такие параметры, как: маршрут автомобиля, состояние подключенных датчиков.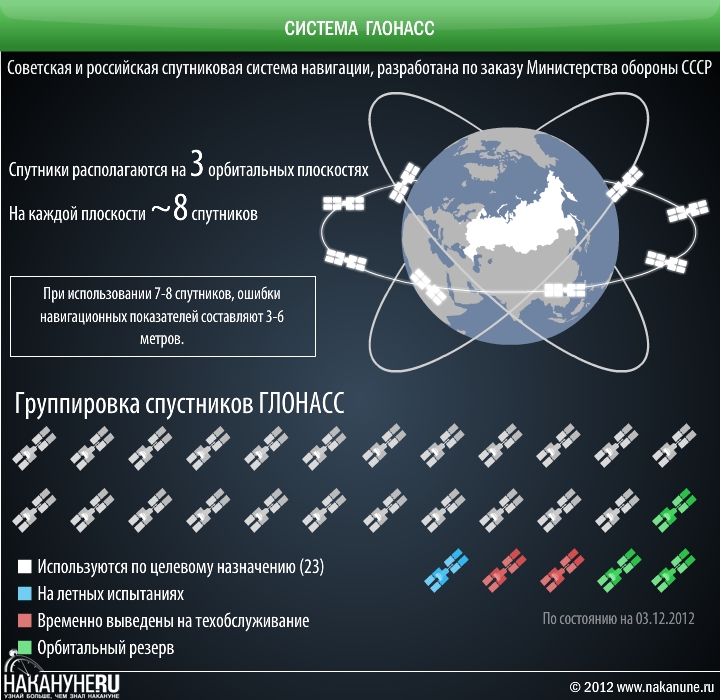 Далее терминал в автоматическом режиме или по запросу пользователя передает собранную информацию по беспроводным каналам связи. Это может быть как сотовый канал системы GSM стандарта GPRS/SMS, так и УКВ канал. Весь объем навигационной и технической информации поступает на сервер системы ГЛОНАСС/ GPS слежения, где обрабатывается и сохраняется в базе данных.
Далее терминал в автоматическом режиме или по запросу пользователя передает собранную информацию по беспроводным каналам связи. Это может быть как сотовый канал системы GSM стандарта GPRS/SMS, так и УКВ канал. Весь объем навигационной и технической информации поступает на сервер системы ГЛОНАСС/ GPS слежения, где обрабатывается и сохраняется в базе данных.
На рабочее место диспетчера устанавливается специальное программное обеспечение, в котором используются электронные векторные многослойные карты местности, с высокой точностью отображающие текущее местоположение и перемещение транспорта.
к началу
Какие данные можно контролировать с помощью системы транспортного мониторинга?
Спутниковая Система транспортного мониторинга позволяет контролировать в режиме реального времени следующие параметры объектов:
• текущее местоположение
• скорость движения
• время движения
• время и место стоянок автотранспорта
• пройденный маршрут
• прохождение контрольных зон в заданный период времени
• время и место погрузки и выгрузки грузов
• факт включения зажигания двигателя
• расход топлива, его заправки и сливы
• количество топлива в баках
• температурный режим
• загруженность механизмов (для спецтехники)
• открытие дверей
• опрокидывание кузова
• обороты двигателя
• количество моточасов
• срабатывание сигнализации, «тревожной кнопки» и т.д.
Кроме того, спутниковая Система ГЛОНАСС/GPS слежения в режиме реального времени передает видеоданные с установленных в автомобиле видеокамер, оповещает о потере связи с поставленным на сигнализацию автомобилем, позволяет удаленно управлять агрегатами автомобиля и исполнительными устройствами, при потере зоны покрытия автоматически переходит на альтернативный канал связи, обеспечивает связь с водителем и многое другое.
Системы спутниковой навигации
Системы спутниковой навигации
Основные элементы
Основные элементы спутниковой системы навигации:
- Орбитальная группировка, состоящая из нескольких (от 2 до 30) спутников, излучающих специальные радиосигналы;
- Наземная система управления и контроля, включающая блоки измерения текущего положения спутников и передачи на них полученной информации для корректировки информации об орбитах;
- Аппаратура потребителя спутниковых навигационных систем, используемое для определения координат;
- Опционально: наземная система радиомаяков, позволяющая значительно повысить точность определения координат.
- Опционально: информационная радиосистема для передачи пользователям поправок, позволяющих значительно повысить точность определения координат.
Принцип работы
Принцип работы спутниковых систем навигации основан на измерении расстояния от антенны на объекте (координаты которого необходимо получить) до спутников, положение которых известно с большой точностью. Таблица положений всех спутников называется альманахом, которым должен располагать любой спутниковый приёмник до начала измерений. Обычно приёмник сохраняет альманах в памяти со времени последнего выключения и если он не устарел — мгновенно использует его. Каждый спутник передаёт в своём сигнале весь альманах. Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений, на основе альманаха, можно вычислить положение объекта в пространстве.
Метод измерения расстояния от спутника до антенны приёмника основан на определённости скорости распространения радиоволн. Для осуществления возможности измерения времени распространяемого радиосигнала каждый спутник навигационной системы излучает сигналы точного времени, используя точно синхронизированные с системным временем атомные часы. При работе спутникового приёмника его часы синхронизируются с системным временем, и при дальнейшем приёме сигналов вычисляется задержка между временем излучения, содержащимся в самом сигнале, и временем приёма сигнала. Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Все остальные параметры движения (скорость, курс, пройденное расстояние) вычисляются на основе измерения времени, которое объект затратил на перемещение между двумя или более точками с определёнными координатами.
Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Все остальные параметры движения (скорость, курс, пройденное расстояние) вычисляются на основе измерения времени, которое объект затратил на перемещение между двумя или более точками с определёнными координатами.
В реальности работа системы происходит значительно сложнее. Ниже перечислены некоторые проблемы, требующие специальных технических приёмов по их решению:
- Отсутствие атомных часов в большинстве навигационных приёмников. Этот недостаток обычно устраняется требованием получения информации не менее чем с трёх (2-мерная навигация при известной высоте) или четырёх (3-мерная навигация) спутников; (При наличии сигнала хотя бы с одного спутника можно определить текущее время с хорошей точностью).
- Неоднородность гравитационного поля Земли, влияющая на орбиты спутников;
- Неоднородность атмосферы, из-за которой скорость и направление распространения радиоволн может меняться в некоторых пределах;
- Отражения сигналов от наземных объектов, что особенно заметно в городе;
- Невозможность разместить на спутниках передатчики большой мощности, из-за чего приём их сигналов возможен только в прямой видимости на открытом воздухе.
Применение систем навигации
Кроме навигации, координаты, получаемые благодаря спутниковым системам, используются в следующих отраслях:
- Геодезия: с помощью систем навигации определяются точные координаты точек
- Картография: системы навигации используется в гражданской и военной картографии
- Навигация: с применением систем навигации осуществляется как морская, так и дорожная навигация
- Спутниковый мониторинг транспорта: с помощью систем навигации ведётся мониторинг за положением, скоростью автомобилей, контроль за их движением
- Сотовая связь: первые мобильные телефоны с GPS появились в 90-х годах. В некоторых странах (например, США) это используется для оперативного определения местонахождения человека, звонящего 911. В России в 2010 году начата реализация аналогичного проекта — Эра-ГЛОНАСС.
- Тектоника, Тектоника плит: с помощью систем навигации ведутся наблюдения движений и колебаний плит
- Активный отдых: существуют различные игры, где применяются системы навигации, например, Геокэшинг и др.
- Геотегинг: информация, например фотографии «привязываются» к координатам благодаря встроенным или внешним GPS-приёмникам
Современное состояние
В настоящее время работают или готовятся к развёртыванию следующие системы спутниковой навигации:
GPS
Принадлежит министерству обороны США. Этот факт, по мнению некоторых государств, является её главным недостатком. Устройства, поддерживающие навигацию по GPS, являются самыми распространёнными в мире. Также известна под более ранним названием NAVSTAR.
ГЛОНАСС
Принадлежит министерству обороны России. Система, по заявлениям разработчиков наземного оборудования, будет обладать некоторыми техническими преимуществами по сравнению с GPS. После 1996 года спутниковая группировка сокращалась и к 2002 году практически полностью пришла в упадок. Была полностью восстановлена только в конце 2011 года. К 2025 году предполагается глубокая модернизация системы.
Бэйдоу
Развёртываемая Китаем подсистема GNSS предназначена для использования только в этой стране. Особенность — небольшое количество спутников, находящихся на геостационарной орбите.
На 28 декабря 2012 года выведено на орбиту Земли шестнадцать навигационных спутников, из них по предназначению используется 11[1].
Согласно планам, к 2012 году она сможет покрывать Азиатско-Тихоокеанский регион, а к 2020 году, когда количество спутников будет увеличено до 35, система «Бэйдоу» сможет работать как глобальная. Реализация данной программы началась в 2000 году. Первый спутник вышел на орбиту в 2007-ом.
Galileo
Европейская система, находящаяся на этапе создания спутниковой группировки. Планируется полностью развернуть спутниковую группировку к 2020 году.
IRNSS
Индийская навигационная спутниковая система, в состоянии разработки. Предполагается для использования только в Индии. Первый спутник был запущен в 2008 году. Общее количество спутников системы IRNSS — 7.
QZSS
Первоначально японская QZSS была задумана в 2002 г. как коммерческая система с набором услуг для подвижной связи, вещания и широкого использования для навигации в Японии и соседних районах Юго-Восточной Азии. Первый запуск спутника для QZSS был запланирован на 2008 г. В марте 2006 японское правительство объявило, что первый спутник не будет предназначен для коммерческого использования и будет запущен целиком на бюджетные средства для отработки принятых решений в интересах обеспечения решения навигационных задач. Только после удачного завершения испытаний первого спутника начнётся второй этап и следующие спутники будут в полной мере обеспечивать запланированный ранее объём услуг.
Основные характеристики систем навигационных спутников
| параметр, способ | СРНС ГЛОНАСС | GPS NAVSTAR | TEN GALILEO | BDS COMPASS |
|---|---|---|---|---|
| Число НС (резерв) | 24 (3) | 24 (3) | 27 (3) | 30 (5) |
| Число орбитальных плоскостей | 3 | 6 | 3 | нет данных |
| Число НС в орбитальной плоскости | 8 | 4 | 9 | нет данных |
| Тип орбит | Круговая (e=0±0.01) | Круговая | Круговая | Круговая |
| Высота орбиты, КМ | 19100 | 20183 | 23224 | 21500 |
| Наклонение орбиты, градусы | 64.8±0.3 | ~55 (63) | 56 | ~55 |
| Номинальный период обращения по среднему солнечному времени | 11 ч 15 мин 44 ± 5 с | ~11 ч 58 мин | 14 ч 4 мин. и 42 с. | нет данных |
| Способ разделения сигналов НС | Кодово-частотный (кодовый на испытаниях) | Кодовый | Кодово-частотный | нет данных |
| Несущие частоты радиосигналов, МГц | L1=1602.5625…1615.5 L2=1246.4375…1256.5 | L1=1575.42 L2=1227.60 L5=1176.45 | E1=1575.42 E5=1191.795 E5A=1176.46 E5B=1207.14 E6=12787.75 | E1=1575.42 E5=1191.795 E5A=1176.46 E5B=1207.14 E6=12787.75 |
| Период повторения дальномерного кода (или его сегмента) | 1 мс | 1 мс (С/А-код) | нет данных | нет данных |
| Тип дальномерного кода | М-последовательность (СТ-код 511 зн.) | Код Голда (С/А-код 1023 зн.) | М-последовательность | нет данных |
| Тактовая частота дальномерного кода, МГц | 0.511 | 1.023 (С/А-код) 10.23 (P,Y-код) | Е1=1.023 E5=10.23 E6=5.115 | нет данных |
| Скорость передачи цифровой информации(соответственно СИ- и D- код) | 50 зн/с (50Гц) | 50 зн/с (50Гц) | 25, 50, 125, 500, 100 Гц | нет данных |
| Длительность суперкадра, мин | 2.5 | 12.5 | 5 | нет данных |
| Число кадров в суперкадре | 5 | 25 | нет данных | нет данных |
| Число строк в кадре | 15 | 5 | нет данных | нет данных |
| Система отсчета времени | UTC (SU) | UTC (USNO) | UTC (GST) | UTC (-) |
| Система отсчета координат | ПЗ-90/ПЗ90.2 | WGS-84 | ETRF-00 | нет данных |
| Тип эфемирид | Геоцентрические координаты и их производные | Модифицированные кеплеровы элементы | Модифицированные кеплеровы элементы | нет данных |
| Сектор излучения от направления на центр земли | ±19 в 0 | L1=±21 в 0 L2=±23.5 в 0 | нет данных | нет данных |
| Сектор Земли | ±14.1 в 0 | ±13.5 в 0 | нет данных | нет данных |
Технические детали работы систем
Рассмотрим некоторые особенности основных действующих систем спутниковой навигации (GPS и ГЛОНАСС):
- Обе системы имеют двойное назначение — военное и гражданское, поэтому излучают два вида сигналов: один с пониженной точностью определения координат (~100 м) для гражданского применения и другой высокой точности (~10-15 м и точнее) для военного применения. Для ограничения доступа к точной навигационной информации вводят специальные помехи, которые могут быть учтены после получения ключей от соответствующего военного ведомства (США для GPS и России для ГЛОНАСС). В настоящее время эти помехи отменены, и точный сигнал доступен гражданским приёмникам, однако в случае соответствующего решения государственных органов стран-владельцев военный код может быть снова заблокирован (в системе GPS это ограничение было отменено только в мае 2000 года и в любой момент может быть восстановлено).
- Спутники GPS располагаются в шести плоскостях на высоте примерно 20 180 км. Спутники ГЛОНАСС (шифр «Ураган») находятся в трёх плоскостях на высоте примерно 19 100 км. Номинальное количество спутников в обеих системах — 24. Группировка GPS полностью укомплектована в апреле 1994-го и с тех пор поддерживается, группировка ГЛОНАСС была полностью развёрнута в декабре 1995-го, но с тех пор значительно деградировала. В 2011 году система ГЛОНАСС полностью восстановлена, количество спутников в группировке достигло 24. В системе появился орбитальный резерв.
- Обе системы используют сигналы на основе т. н. «псевдошумовых последовательностей», применение которых придаёт им высокую помехозащищённость и надёжность при невысокой мощности излучения передатчиков.
- В соответствии с назначением, в каждой системе есть две базовые частоты — L1 (стандартной точности) и L2 (высокой точности). Для GPS L1=1575,42 МГц и L2=1227,6 МГц. В ГЛОНАСС используется частотное разделение сигналов, то есть каждый спутник работает на своей частоте и, соответственно, L1 находится в пределах от 1602,56 до 1615,5 МГц и L2 от 1246,43 до 1256,53.
- Каждый спутник системы, помимо основной информации, передаёт также вспомогательную, необходимую для непрерывной работы приёмного оборудования. В эту категорию входит полный альманах всей спутниковой группировки, передаваемый последовательно в течение нескольких минут. Таким образом, старт приёмного устройства может быть достаточно быстрым, если он содержит актуальный альманах (порядка 1-й минуты) — это называется «тёплый старт», но может занять и до 15-ти минут, если приёмник вынужден получать полный альманах — т. н. «холодный старт». Необходимость в «холодном старте» возникает обычно при первом включении приёмника, либо если он долго не использовался.
- Для подавления сигналов спутниковых навигационных систем используются передатчики активных помех. Впервые широкой общественности передатчики разработки российской компании «Авиаконверсия» были представлены в 1997 году на авиасалоне МАКС-1997[2].
Дифференциальное измерение
Отдельные модели спутниковых приёмников позволяют производить т. н. «дифференциальное измерение» расстояний между двумя точками с большой точностью (сантиметры). Для этого измеряется положение навигатора в двух точках с небольшим промежутком времени. При этом, хотя каждое такое измерение имеет погрешность, равную 10-15 метров без наземной системы корректировки и 10-50 см с такой системой, измеренное расстояние имеет погрешность намного меньшую, так как факторы, мешающие измерению (погрешность орбит спутников, неоднородность атмосферы в данном месте Земли и т. д.) в этом случае взаимно вычитаются. Кроме того, есть несколько систем, которые посылают уточняющую информацию («дифференциальную поправку к координатам»), позволяющую повысить точность измерения координат приёмника до десяти сантиметров. Дифференциальная поправка пересылается либо с геостационарных спутников, либо с наземных базовых станций, может быть платной (расшифровка сигнала возможна только одним определённым приёмником после оплаты «подписки на услугу») или бесплатной.
В настоящее время (2009 год) существуют бесплатные американская система WAAS, европейская система EGNOS, японская система MSAS основанные на нескольких передающих коррекции геостационарных спутниках, позволяющих получить высокую точность (до 30 см).
Запланировано создание системы коррекции для ГЛОНАСС под названием СДКМ.
GPS Глонасс — ключевые особенности и различия
В последнее время все чаще в вопросах, касающихся навигационных систем и сервисов, упоминается GPS ГЛОНАСС. Сегодня навигация ГЛОНАСС GPS наращивает свою популярность, как среди индивидуальных лиц, так и в рядах частных и государственных компаний. Что стало причиной подобного явления: обычное любопытство по отношению к новшеству или более обоснованный выбор? Данный вопрос требует детального рассмотрения, и без небольшого исторического экскурса нам не обойтись.
Система GPS ГЛОНАСС – начало начал
До недавнего времени выбирать между навигационными системами ГЛОНАСС или GPS, что лучше, было просто неактуально, ввиду безоговорочного лидерства последней. Это, можно сказать, был обусловлено исторически. Отставание ГЛОНАСС, разрабатываемой для Советского Союза, от американской GPS было изначальным. Обе эти системы были предусмотрены для оборонных целей каждого из государств и разрабатывались в 80-х годах ХХ века, стой разницей, что США стартовали в «навигационной гонке» на 8 лет раньше. Постепенно разрыв между собой спутниковые системы GPS и ГЛОНАСС сократили, однако после распада Союза ситуация изменилась коренным образом. Развитие ГЛОНАСС остановилось, а лидерство GPS стало единоличным и безоговорочным.
Спутниковые системы GPS и ГЛОНАСС: преимущества и недостатки
Интерес к ГЛОНАСС и разработки в этой области возродились в начале 2000-х годов. В результате, сегодня российская навигационная система по многим параметрам сравнялась с GPS, а по некоторым даже превзошла. Безусловно, разработчикам ГЛОНАСС необходимо усовершенствовать еще множество нюансов. К примеру, сократить ошибки навигационных определений и повысить точность позиционирования объектов. Сейчас точность ГЛОНАСС и GPS составляет 4-7 м (при использовании в среднем 7-8 спутников) и 2-5 м (при использовании 6-11 спутников) соответственно.
Еще одним существенным недостатком ГЛОНАСС является значительно меньший срок эксплуатации спутников. При этом имеются и превосходства над американской навигационной системой. Российские спутники в орбитальном положении не имеют резонанса с движением Земли, поэтому вспомогательная корректировка им не требуется. Оптимальные параметры орбиты делают ГЛОНАСС безоговорочным лидером при работе в приполярных широтах.
Спутниковая навигация GPS ГЛОНАСС стала своеобразным гибридом и воплотила преимущества обоих систем. Стоит также отметить, что практически все устройства, как любительского, так и профессионального уровня, работающие на основе ГЛОНАСС, принимают и сигналы GPS, поэтому вопрос «чем отличается ГЛОНАСС от ГЛОНАСС GPS» является неактуальным.
Спутниковые навигационные системы GPS и ГЛОНАСС: работа в тандеме
Спутниковые системы навигации GPS и ГЛОНАСС применяются для определения местоположения различных объектов и прочих вспомогательных сведений: скорость и направление движения, высота, численность спутников и так далее. Прием и передача параметров для спутникового мониторинга GPS ГЛОНАСС осуществляет GPS ГЛОНАСС трекер. Принятую информацию это устройство может транслировать с периодическими интервалами с помощью GPRS на сервер либо в качестве SMS уведомлений с содержанием интересующих координат или ссылок на сервис, предоставляющий возможность просмотреть координаты непосредственно на карте.
Разновидности GPS ГЛОНАСС контроллеров
Спутниковый GPS ГЛОНАСС контроль осуществляется с помощью трекеров двух классов:
- персональный трекер используется для отслеживанием людей и домашних животных;
- автомобильный ГЛОНАСС GPS контроль стал возможен благодаря станционному прибору, который синхронизируется с бортовой сетью автотранспортного средства. Такой трекер зачастую может подключать дополнительные опции: датчик контроля температуры, топлива и так далее. Разновидностью автотрекеров считаются скрытые маячки и закладки, которые работают автономно от батареек.
Многие контроллеры обладают кнопкой сигнала SOS и возможностью прослушивания в небольшом радиусе вокруг устройства, что существенно расширяет область применения GPS ГЛОНАСС.
GPS транспорта, ГЛОНАСС или GPS ГЛОНАСС мониторинг
Безусловно, двухсистемный мониторинг автотранспорта ГЛОНАСС GPS значительно эффективнее, нежели каждая из навигационных систем по отдельности. Гибридный трекер успешно справляется с приемом-передачей сигналов независимо от местоположения объекта и погодных условий. Трекеры, оборудованные модулем спутниковой связи, могут транслировать данные из любой точки земного шара. Для жителей мегаполисов и крупных городов GPS ГЛОНАСС система мониторинга является прекрасной альтернативой односистемной навигации. Дело в том, что в пределах высотной регулярной застройки возможности спутникового слежения существенно сокращаются, а применение двух навигационных систем одновременно, то есть GPS ГЛОНАСС мониторинг, качественно улучшает возможности пользователей.
Применение GPS ГЛОНАСС
Система мониторинга транспорта GPS ГЛОНАСС позволяет эффективно контролировать:
- передвижение транспорта автопарка;
- перевозку грузов;
- расход топлива;
- километраж;
- личное автотранспортное средство;
- сдаваемую в аренду технику и так далее.
Благодаря возможностям, которые открывает гибридная система навигации, вы сможете успешно оптимизировать логистическое направление на своем предприятии, что приведет к существенной экономии, как денежных средств, так и времени.
Мониторинг транспорта GPS ГЛОНАСС: преимущества внедрения
Согласно статистическим данным и практическому опыту компаний, применяющих в своей деятельности навигационную систему GPS/ГЛОНАСС, экономический эффект использования двухсистемного спутникового слежения характеризуют такие показатели:
- значительное снижение расходов на техобслуживание и топливо благодаря оптимизации маршрутов и устранению вероятности нецелевого пробега автотранспортных средств;
- сокращение урона, обусловленного кражами грузов и угоном авто;
- улучшение качества и расширение возможностей транспортного обслуживания клиентов. Способность оперативно реагировать на запросы и увеличение ассортимента услуг, в свою очередь, влекут привлечение новых клиентов;
- оптимизация планирования рабочего процесса благодаря наличию точных данных о пробеге автотранспорта и минимизация затрат на его же ремонт;
- возможность формирования адекватной системы мотивации, поощряющей эффективное использование рабочего времени, транспорта, расходных материалов и спецтехники. При этом материальное стимулирование и справедливое поощрение является отличным способом повышения производительности труда персонала.
Сегодня приобретение такой навигации становится реальной необходимостью, как для частных лиц, так и для различных компаний. GPS ГЛОНАСС купить, установить, а также получить доступ к системе на протяжении одной недели возможно с помощью нашей компании. Мы уже не первый год специализируемся на системах спутникового слежения, что устраняет любые сомнения в нашей квалификации.
Другие глобальные навигационные спутниковые системы (GNSS)
На этой странице:
На других страницах:
Глобальная навигационная спутниковая система (GNSS) — это общий термин, описывающий любую спутниковую группировку, которая предоставляет услуги позиционирования, навигации и синхронизации (PNT) на глобальной или региональной основе.
Хотя GPS является наиболее распространенной GNSS, другие страны используют или уже используют свои собственные системы для обеспечения дополнительных, независимых возможностей PNT.Основные из них описаны ниже.
GNSS также может относиться к системам дополнений, но их слишком много, чтобы перечислять их здесь.
Некоторые ссылки ниже ведут на внешние веб-сайты, которые не контролируются правительством США. Ссылки предоставляются в информационных целях и не означают одобрения правительством США каких-либо иностранных систем, услуг или мнений.
Навигационная спутниковая система BeiDou (BDS)
BeiDou, или BDS, является региональной GNSS, принадлежащей и управляемой Китайской Народной Республикой.Китай в настоящее время расширяет систему, чтобы к 2020 году обеспечить глобальное покрытие с помощью 35 спутников. Ранее BDS называлась Compass.
Подробнее:
Галилео
Galileo — это глобальная GNSS, принадлежащая и управляемая Европейским Союзом. ЕС объявил о запуске Galileo Initial Services в 2016 году и планирует завершить систему из 24+ спутников к 2020 году.
Подробнее:
ГЛОНАСС
ГЛОНАСС ( Глобальная навигационная спутниковая система , или Глобальная навигационная спутниковая система) является глобальной GNSS, принадлежащей и эксплуатируемой Российской Федерацией.Полностью действующая система состоит из 24+ спутников.
Подробнее:
IRNSS — это региональная GNSS, принадлежащая и управляемая правительством Индии. IRNSS — это автономная система, предназначенная для покрытия индийского региона и 1500 км вокруг материковой части Индии. Система состоит из 7 спутников и должна быть объявлена работающей в 2018 году.В 2016 году Индия переименовала IRNSS в Индийское навигационное созвездие (NavIC, что означает «моряк» или «навигатор»).
Подробнее:
Квазизенитная спутниковая система (QZSS)
QZSS — это региональная GNSS, принадлежащая правительству Японии и управляемая QZS System Service Inc. (QSS). QZSS дополняет GPS для улучшения покрытия в Восточной Азии и Океании. Япония планирует к 2018 году иметь действующую группировку из 4 спутников и расширить ее до 7 спутников для автономной работы к 2023 году.
Подробнее:
Какие бывают системы GNSS?
Проверить новую кофейню в городе или исследовать место путешествия своей мечты, как местный житель, теперь не так уж и важно. Где бы вы ни застряли, вы достаете свой телефон, набираете пункт назначения и перемещаетесь к нему. Но задумывались ли вы когда-нибудь, как это крошечное мобильное устройство в вашей руке направляет вас в каждый уголок? Конечно, вы знаете, что волшебство творит крошечный чип GPS в телефоне.GPS предоставляет информацию о местоположении и времени в любой точке Земли.
Но знаете ли вы, что GPS, или глобальная система позиционирования, является одной из четырех глобальных навигационных спутниковых систем? Четыре глобальные системы GNSS: GPS (США), ГЛОНАСС (Россия), Galileo (ЕС), BeiDou (Китай). Дополнительно есть две региональные системы — QZSS (Япония) и IRNSS или NavIC (Индия).
Ознакомьтесь с нашим специальным рассказом об эволюции глобальной навигационной спутниковой системы
Глобальная система позиционирования (США)GPS — самая старая система GNSS.Он начал свою деятельность в 1978 году и был доступен для глобального использования с 1994 года.
Необходимость иметь независимую военную навигацию послужила толчком для его нововведений. И американские военные первыми это осознали. Таким образом, в 1964 году для этой цели была развернута система Transit. Transit, также известный как NAVSAT, работал над эффектом Доплера и использовался для предоставления информации о местоположении и навигации ракетным подводным лодкам, надводным кораблям, а также для гидрографических и геодезических изысканий армии США.Со временем GPS был открыт для всеобщего использования. В настоящее время GPS насчитывает 33 группировки спутников, 31 из которых находятся на орбите и работают. Он поддерживается ВВС США и стремится поддерживать доступность как минимум 24 действующих спутников GPS. На сегодняшний день GPS запустила 72 спутника.
ТАКЖЕ ЧИТАЙТЕ: Как работает GNSS?
ГЛОНАСС (Россия)GLO bal NA vigation S atellite S ystem или ГЛОНАСС — глобальная навигационная система России.ГЛОНАСС начал работать в 1993 году с 12 спутниками на двух орбитах на высоте 19 130 км. В настоящее время на орбите находится 27 спутников, и все они находятся в рабочем состоянии. ГЛОНАСС эксплуатируется Воздушно-космическими силами России и является второй альтернативной действующей навигационной системой.
WATCH: Что такое GNSS и как оно работает?
Галилео (ЕС)Galileo — это группировка GNSS Европейского Союза, которую собирает Европейское космическое агентство, и Европейское агентство GNSS будет управлять ею.Galileo — это глобальная навигационная система, доступная для гражданского и коммерческого использования. Полностью развернутая система Galileo будет состоять из 30 действующих спутников и 6 запасных частей на орбите. На данный момент на орбите находятся 22 спутника из 30. Galileo начала предлагать ранние операционные возможности с 2016 года и, как ожидается, выйдет на полную мощность к 2020 году.
ТАКЖЕ ЧИТАЙТЕ: CAG подтягивает ISRO к задержкам NavIC, перерасходу
BeiDou (Китай)BeiDou — спутниковая навигационная система Китая.Всего на орбите находится 22 действующих спутника, и планируется, что вся группировка будет состоять из 35 спутников. BeiDou имеет два отдельных созвездия: BeiDou-1 и BeiDou-2 . BeiDou-1, также известный как первое поколение, представлял собой созвездие из трех спутников. Он начал работать в 2000 году и предлагал ограниченное покрытие и навигационные услуги, в основном для пользователей в Китае и соседних регионах. Beidou-1 был выведен из эксплуатации в конце 2012 года.
BeiDou-2, , также известный как COMPASS, — второе поколение системы.Он был введен в эксплуатацию в 2011 году с частичной группировкой из 10 спутников на орбите. Следующее поколение — BeiDou-3. Первый спутник БДС-3 был запущен в марте 2015 года. По состоянию на январь 2018 года запущено девять спутников БДС-3. Ожидается, что BeiDou-3 будет полностью готов к концу 2020 года
QZSS (Япония)Q uasi- Z enith S atellite S ystem — это региональная спутниковая навигационная система из Японии, которая все еще находится в разработке Центром исследований и приложений спутникового позиционирования, Япония.Согласно планам, группировка QZSS будет иметь 7 спутников, из которых 4 уже находятся на орбите. Ожидается, что QZSS будет запущен к концу 2018 года и будет предоставлять высокоточные и стабильные услуги позиционирования в регионе Азии и Океании. QZSS будет совместим с GPS.
IRNSS — NAVIC (Индия)T Индийская региональная навигационная спутниковая система (IRNSS), которая позже получила рабочее название NavIC или NAV igation с I ndian C , является региональной спутниковой навигационной системой Индии.Запущенная и управляемая Индийской организацией космических исследований (ISRO), IRNSS охватывает Индию и близлежащие регионы на протяженности до 1500 км. Все семь спутников находятся на орбите, но первый спутник — IRNSS A — сейчас не работает, так как в прошлом году ISRO сообщило, что все три атомных часа на нем вышли из строя.
ТАКЖЕ ЧИТАЙТЕ: Какие ближайшие проекты от ISRO?
ЗаявкаISRO на запуск нового спутника провалилась в августе 2017 года, когда в редких случаях тепловой экран ракеты-носителя не отделялся, чтобы высвободить спутник.В настоящее время три его спутника IRNSS находятся на геостационарной орбите, а еще 4 — на геостационарных орбитах. Еще есть время, прежде чем Индия начнет пользоваться своими услугами.
В чем разница между 5 созвездиями GNSS?
Прежде чем мы погрузимся в различия между 5 созвездиями GNSS … Важно, чтобы мы все на одной странице с различием между GNSS и GPS.
Многие люди путают технологии GNSS и GPS. Хороший способ думать о глобальных навигационных спутниковых системах (GNSS) — это как основа (или основная технология), лежащая в основе GPS. Глобальная система позиционирования (GPS) GPS — это созвездие GNSS, но GNSS не всегда является GPS. GPS — одна из 5 группировок GNSS, используемых во всем мире.
Пять группировок GNSS включают GPS (США), QZSS (Япония), BEIDOU (Китай), GALILEO (ЕС) и ГЛОНАСС (Россия). В этом посте мы подробно рассмотрим каждое из этих созвездий.
Основная причина появления всех 5 спутниковых группировок — доступность и избыточность. Если одна система выйдет из строя, ее может заменить другая группировка GNSS. Системные сбои случаются не часто, но приятно знать, что есть варианты резервного копирования.
Так в чем разница между этими 5 созвездиями? Рассмотрим каждую подробнее …
1. GPS
GPS — пионер в мире GNSS. Это самая старая система GNSS, которая начала работать в 1978 году и стала доступной для глобального использования в 1994 году.
GPS был изобретен из-за потребности в независимой военной навигационной системе. Министерство обороны США первым осознало это. В системе использовалось много сложностей, чтобы обеспечить высокую точность, а также защитить ее от попыток подмены и спуфинга. Позднее в будущем был обнародован GPS.
GPS работает в диапазоне частот, называемом L-диапазоном, частью радиоспектра от 1 до 2 ГГц. L-Band был выбран по нескольким причинам, в том числе:
- Ионосферная задержка более значительна на более низких частотах
- Упрощение конструкции антенны
- Свести к минимуму влияние погоды на распространение сигнала GPS
Сегодня GPS — самая точная навигационная система в мире.В спутниках GPS последнего поколения используются рубидиевые часы с точностью до ± 5 частей из 10 11 . Эти часы синхронизируются еще более точными наземными цезиевыми часами.
2. QZSS
Квазизенитная спутниковая система (QZSS) — это региональная спутниковая система из Японии, которую иногда называют «японской GPS».
QZSS в настоящее время использует одну геостационарную спутниковую орбиту и три на орбите QZO (наклонная, слегка эллиптическая, геостационарная орбита).
Система хронометража QZSS первого поколения (TKS) будет основана на рубидиевых часах. Однако первые спутники QZSS будут нести базовый прототип экспериментальной системы синхронизации кварцевых часов. Технология TKS — это новая спутниковая система хронометража, которая не требует бортовых атомных часов и используется в существующих навигационных спутниковых системах, таких как системы GPS, ГЛОНАСС и Galileo. Это позволяет системе работать оптимально, когда спутники находятся в прямом контакте с наземной станцией, что делает ее отличным решением для группировки QZSS.
Большим преимуществом QZSS является то, что он совместим с GPS. Это обеспечивает достаточное количество спутников для стабильного и высокоточного позиционирования.
3. BEIDOU
BEIDOU — это китайская спутниковая навигационная система, состоящая из двух отдельных спутниковых группировок, BeiDou-1 и BeiDou-2 (и скоро BeiDou-3) …
Источник: China Daily
BeiDou-1
BeiDou-1 (также известная как экспериментальная система спутниковой навигации BeiDou) состоит из трех спутников, предлагающих ограниченные навигационные услуги и зону покрытия.В основном он использовался пользователями в Китае и соседних регионах. BeiDou-1 выведен из эксплуатации в конце 2012 года.
BeiDou-2
BeiDou-2 (иногда называемый КОМПАС) — второе поколение системы. Он начал работать в декабре 2011 года с частичной группировкой из 10 спутников. Он предоставляет услуги клиентам в Азиатско-Тихоокеанском регионе с конца 2012 года.
BeiDou-3
Китай приступил к созданию третьего поколения системы BeiDou-3 в 2015 году.На этот раз … для глобального освещения.
По состоянию на октябрь 2018 года на орбите находится 15 спутников. Цель состоит в том, чтобы к 2020 году вывести на орбиту 35 спутников, которые по завершении будут предоставлять глобальные услуги.
После полного запуска и эксплуатации BeiDou-3 станет альтернативой американским GPS, ГЛОНАСС или GALILEO. Ожидается, что BeiDou-3 будет еще более точным с точностью до миллиметра (с постобработкой).
Интересный факт: По данным China Daily, в 2015 году (через пятнадцать лет после запуска системы BeiDou-1) оборот компании составил 31 доллар.5 миллиардов в год для крупных компаний, таких как China Aerospace Science and Industry Corp, AutoNavi Holdings Ltd и China North Industries Group Corp.
4. ГАЛИЛЕО
GALILEO — европейская система GNSS, совместимая с GPS и ГЛОНАСС. Он начал предоставлять услуги в декабре 2016 года.
приемники GALILEO отслеживают положение спутника созвездия в том, что называется «Reference System GALILEO» с использованием спутниковых технологий и триангуляции принципы.
Система Galileo разделена на три основных сегмента…
- Космос
- Земля
- Пользователь
Функция космического сегмента состоит в том, чтобы генерировать и передавать кодовые и фазовые сигналы с определенной структурой сигнала Galileo. Он также сохраняет и повторно передает навигационные данные, отправленные наземным сегментом.
Наземный сегмент является основным элементом системы, который управляет всей группировкой, включая средства навигационной системы и службы распространения.Наземный сегмент состоит из:
- Два наземных центра управления (GCC)
- Сеть телеметрии
- станций слежения и контроля (TT&C)
- Сеть миссий восходящих станций (ULS)
- Сеть сенсорных станций Galileo (GSS)
Пользовательский сегмент состоит из приемников GALILEO. Основная цель здесь — отслеживать координаты спутниковой группировки и обеспечивать очень точное время. Это делается, конечно, путем приема сигналов Galileo, определения псевдодальности (и других наблюдаемых) и решения навигационных уравнений.
Ожидается, чтоGALILEO выйдет на полную работоспособность (FOC) к 2020 году.
5. ГЛОНАСС
Наконец, ГЛОНАСС — это российская версия GPS. Разработка началась в 1976 году Советским Союзом. Всего существует 5 версий ГЛОНАСС, в том числе:
- ГЛОНАСС (1982)
- ГЛОНАСС-М (2003)
- ГЛОНАСС-К (2011)
- ГЛОНАСС-К2 (2015)
- ГЛОНАСС-КМ (2025 г. — в фазе исследований)
Вспомогательный ГЛОНАСС
Вспомогательный ГЛОНАСС (А-ГЛОНАСС) во многом аналогичен ГЛОНАСС, но имеет больше функций для смартфонов.Эти функции включают в себя пошаговую навигацию, данные о загруженности дорог в реальном времени и многое другое. А-ГЛОНАСС использует близлежащие вышки сотовой связи для быстрой фиксации вашего точного местоположения. Также улучшена производительность чипсетов с поддержкой ГЛОНАСС.
Разница между ГЛОНАСС и GPS GNSS
Во-первых, сеть GPS США включает 31 спутник, а ГЛОНАСС использует 24 спутника. Две системы также несколько различаются по точности. Точность определения местоположения ГЛОНАСС составляет 5-10 м, а GPS — 3,5-7.8м. Следовательно, точность GPS превосходит ГЛОНАСС, поскольку меньшее количество ошибок лучше.
Что касается частот, то ГЛОНАСС работает на частоте 1,602 ГГц, а GPS — на частоте 1,57542 ГГц (сигнал L1).
При использовании отдельно ГЛОНАСС не обеспечивает такое сильное покрытие по сравнению с GPS. На самом деле существенных преимуществ ГЛОНАСС перед GPS нет.
ГЛОНАСС — отличный помощник для GPS. Когда сигналы GPS теряются (например, когда вы находитесь между высокими зданиями), ГЛОНАСС вам на помощь.
Что общего у всех созвездий GNSS?
Короткий ответ — потребность в точном времени и точности.Обычно это достигается с помощью высокопроизводительных атомных часов с рубидием или спутниковых GPSDO LEO. Здесь, в Bliley Technologies, мы применили более чем 85-летний опыт управления частотой, чтобы представить миру одни из лучших решений для синхронизации для созвездий GNSS и спутников LEO.
Вам обязательно стоит подумать о загрузке полной спецификации Hyas, нашего нового управляемого GPS-осциллятора (GPSDO), специально разработанного для спутников LEO и созвездий GNSS. Я думаю, тебе понравится то, что ты увидишь!
ГЛОНАСС | НовАтель
ГЛОНАСС (Глобальная навигационная спутниковая система, Россия)
ГЛОНАСС была разработана Советским Союзом как экспериментальная система военной связи в 1970-х годах.Когда закончилась «холодная война», Советский Союз признал, что ГЛОНАСС имеет коммерческое применение, благодаря способности системы передавать погодные радиопередачи, данные связи, навигации и разведки.
Первый спутник ГЛОНАСС был запущен в 1982 году, и система была объявлена полностью работоспособной в 1993 году. После периода ухудшения характеристик ГЛОНАСС Россия взяла на себя обязательство довести систему до требуемого минимума в 18 активных спутников. В настоящее время ГЛОНАСС имеет 24 спутника в группировке.
спутников ГЛОНАСС эволюционировали с момента запуска первых. ГЛОНАСС-М последнего поколения изображен на рис. 30. . готовится к запуску.
Проектирование системы ГЛОНАСС
Созвездие ГЛОНАСС обеспечивает видимость различного количества спутников в зависимости от вашего местоположения. Наличие минимум четырех спутников в поле зрения позволяет приемнику ГЛОНАСС вычислять свое положение в трех измерениях и синхронизировать с системным временем.
Космический сегмент ГЛОНАСС
Космический сегмент ГЛОНАСС представлен в таблице 4 .
Таблица 4: Спутниковая группировка ГЛОНАСС
| Спутники | 24 плюс 3 запасных |
| Орбитальные самолеты | 3 |
| Угол наклона орбиты | 64,8 градуса |
| Радиус орбиты | 19,140 км |
Космический сегмент ГЛОНАСС состоит из 24 спутников в трех орбитальных плоскостях, по восемь спутников в каждой плоскости.
Геометрия созвездия ГЛОНАСС повторяется примерно раз в восемь дней. Период обращения каждого спутника составляет примерно 8/17 звездных суток, так что за восемь звездных суток спутники ГЛОНАСС совершили ровно 17 орбитальных оборотов.
Каждая орбитальная плоскость содержит восемь равноотстоящих спутников. Один из спутников будет находиться в одной и той же точке неба каждый день в одно и то же звездное время.
Спутники выведены на условно круговые орбиты с наклонением цели 64.8 градусов и радиус орбиты 19 140 км, что примерно на 1060 км меньше, чем у спутников GPS.
Спутниковый сигнал ГЛОНАСС идентифицирует спутник и включает:
- Информация о местоположении, скорости и ускорении для вычисления местоположения спутников.
- Спутниковая медицинская информация.
- Смещение времени ГЛОНАСС от UTC (SU) [всемирное координированное время, Россия].
- Альманах всех остальных спутников ГЛОНАСС.
«Земля была абсолютно круглой.. . Я никогда не знал, что означает слово «круглая», пока не увидел Землю из космоса ». Алексей Леонов, советский космонавт, рассказывает о своем историческом выходе в открытый космос в 1985 году.
Сегмент управления ГЛОНАСС
Сегмент управления ГЛОНАСС состоит из центра управления системой и сети станций слежения за командами по всей России. Сегмент управления ГЛОНАСС, аналогично сегменту GPS, контролирует состояние спутников, определяет поправки эфемерид, а также смещения спутниковых часов относительно времени ГЛОНАСС и UTC (всемирное координированное время).Дважды в день загружает поправки на спутники.
Сигналы ГЛОНАСС
Таблица 5 обобщает сигналы ГЛОНАСС.
Таблица 5: Характеристики сигнала ГЛОНАСС
| Обозначение | Частота | Описание |
| L1 | 1598,0625 — 1609,3125 МГц | L1 модулируется сигналами HP (высокая точность) и SP (стандартная точность). |
| L2 | 1242,9375 — 1251,6875 МГц | L2 модулируется сигналами HP и SP. Код SP идентичен тому, который передается на L1. |
Каждый спутник ГЛОНАСС передает на немного разных частотах L1 и L2, с P-кодом (код HP) как на L1, так и на L2, и кодом C / A (код SP) на L1 (все спутники) и L2 (большинство спутников). Спутники ГЛОНАСС передают один и тот же код на разных частотах, метод, известный как FDMA, для множественного доступа с частотным разделением каналов.Обратите внимание, что этот метод отличается от того, который используется в GPS.
СигналыГЛОНАСС имеют ту же поляризацию (ориентацию электромагнитных волн), что и сигналы GPS, и имеют сопоставимую мощность сигнала.
Система ГЛОНАСС основана на 24 спутниках, использующих 12 частот. Спутники могут совместно использовать частоты, имея противоположные спутники, передающие на одной и той же частоте. Спутники-антиподы находятся в одной орбитальной плоскости, но разнесены на 180 градусов. Спаренные спутники могут передавать на одной и той же частоте, потому что они никогда не появятся одновременно в поле зрения приемника на поверхности Земли, как показано на Рис. 32.
Модернизация ГЛОНАСС
По мере того, как срок службы существующих спутников ГЛОНАСС-М подходит к концу, они будут заменены спутниками ГЛОНАСС-К следующего поколения. Новые спутники обеспечат систему ГЛОНАСС новыми сигналами GNSS.
L3
Первый блок спутников ГЛОНАСС-К (ГЛОНАСС-К1) будет транслировать новый гражданский сигнал, обозначенный L3, с центральной частотой 1202,025 МГц. В отличие от существующих сигналов ГЛОНАСС, L3 основан на CDMA, что облегчит взаимодействие с GPS и Galileo.
Первый спутник ГЛОНАСС-К1 запущен в феврале 2011 года.
L1 и L2 CDMA
Второй блок спутников ГЛОНАСС-К (ГЛОНАСС-К2) добавляет еще два сигнала на основе CDMA, транслируемых на частотах L1 и L2. Выходящие сигналы FDMA L1 и L2 также будут транслироваться для поддержки унаследованных приемников. Запуск спутников ГЛОНАСС-К2 планируется начать с 2015 года.
L5
Третий блок спутников ГЛОНАСС-К (ГЛОНАСС-КМ) добавит в систему ГЛОНАСС сигнал L5.
ГЛОНАСС GPS: разница между обоими
Позвольте нашим опытным сотрудникам помочь вам найти продукты, которые соответствуют вашим уникальным потребностям в GNSS!
ГЛОНАСС GPS: в чем разница между ними?
Глобальная навигационная спутниковая система (GNSS) включает в себя созвездия спутников, вращающихся над земной поверхностью и непрерывно передающих сигналы, которые позволяют пользователям определять свое местоположение. ГЛОНАСС GPS — это примеры созвездий ГНСС.
Глобальная система позиционирования (GPS) относится к системе глобального позиционирования NAVSTAR, группе спутников, разработанной Министерством обороны США (DoD). Первоначально система глобального позиционирования была разработана для использования в военных целях, но позже стала доступной и для гражданского населения. В настоящее время GPS является наиболее широко используемой группировкой спутников GNSS в мире, и ее сеть из 30+ спутников и 6 орбитальных плоскостей обеспечивает непрерывную информацию о местоположении и времени во всем мире при любых погодных условиях.
ГЛОНАСС — это аббревиатура от Globalnaya Navigazionnaya Sputnikovaya Sistema; В переводе с русского это означает «Глобальная навигационная спутниковая система». ГЛОНАСС в настоящее время эксплуатируется Воздушно-космическими силами обороны России и обеспечивает определение местоположения и скорости в реальном времени как для военных, так и для гражданских целей. Развитие ГЛОНАСС началось в 1976 году в Советском Союзе и было восстановлено и завершено в начале 2000-х годов, когда это стало главным государственным приоритетом. Сегодня ГЛОНАСС имеет сеть из 24 спутников с 3-мя орбитальными плоскостями, которые покрывают не только 100% территории России, но и Землю в целом.
Сравнение функций GPS ГЛОНАСС
В настоящее время нет серьезных различий между двумя системами, когда речь идет о функциях, глобальном охвате или точности. Однако орбита ГЛОНАСС делает ее более пригодной для использования в северном полушарии, чем в южном полушарии, из-за большего количества наземных станций в этих местах. Наиболее существенное различие между ГЛОНАСС / GPS — это способ связи с приемниками.При использовании GPS спутники используют одни и те же радиочастоты, но имеют разные коды для связи, в то время как спутники ГЛОНАСС имеют одинаковые коды, но используют разные частоты, что позволяет спутникам на одной орбитальной плоскости связываться друг с другом.
Хотя изначально ГЛОНАСС создавался как альтернатива GPS, теперь мы видим основные преимущества одновременной работы двух систем, а не независимо друг от друга, для обеспечения точного определения местоположения в любой точке Земли. Включение всех 55 спутников, доступных по всему миру, в систему ГЛОНАСС GPS обеспечивает гораздо большую точность, особенно в городских каньонах.
Ознакомьтесь с продуктами TransiTiva
GNSS
Глобальные навигационные спутниковые системы (GNSS) включают в себя созвездия спутников на околоземной орбите, которые транслируют свое местоположение в пространстве и времени, сетей наземных станций управления и приемников, которые вычисляют положение на земле путем трилатерации. GNSS используются на всех видах транспорта: на космических станциях, в авиации, морском, железнодорожном, автомобильном и общественном транспорте. Позиционирование, навигация и синхронизация (PNT) играют решающую роль в телекоммуникациях, топографической съемке, правоохранительной деятельности, реагировании на чрезвычайные ситуации, точном земледелии, горнодобывающей промышленности, финансах, научных исследованиях и т.Они используются для управления компьютерными сетями, воздушным движением, электрическими сетями и многим другим.
В настоящее время GNSS включает в себя две полностью работающие глобальные системы, США. Глобальная система позиционирования (GPS) и Российская Федерация Глобальная навигационная спутниковая система (ГЛОНАСС), а также развивающиеся глобальные и региональные системы, а именно европейские Европейская спутниковая навигационная система (GALILEO) и китайская КОМПАС / Бей-Доу, Индия Региональная навигационная спутниковая система (IRNSS) и японская Квазизенитная спутниковая система (QZSS).Как только все эти глобальные и региональные системы станут полностью работоспособными, пользователь получит доступ к сигналам позиционирования, навигации и синхронизации с более чем 100 спутников.
В дополнение к этим, существуют спутниковые системы функционального дополнения, например, США. Широкозонная система увеличения (WAAS), Европейская геостационарная навигационная служба (EGNOS), Российская система дифференциальной коррекции и мониторинга (SDCM), индийская GPS-навигация с гео-расширением (GAGAN) и японские многофункциональные транспортные спутники (MTSAT), спутниковые системы дополнения (MSAS).Сочетание их с проверенными наземными технологиями, такими как инерциальная навигация, откроет дверь для новых приложений, приносящих социально-экономические выгоды. Последние — это приложения, требующие не только точности, но и особой надежности или целостности. Важные для безопасности транспортные приложения, такие как посадка гражданских самолетов, имеют строгие требования к точности и целостности.
Успешное завершение работы Международный комитет по глобальным навигационным системам (ICG), в частности, в установлении взаимодействия между глобальными системами, позволит пользователю GNSS использовать один прибор для приема сигналов от нескольких спутниковых систем.Это обеспечит дополнительные данные, особенно в городских и горных регионах, и большую точность измерения времени или местоположения. Чтобы воспользоваться этими достижениями, пользователи GNSS должны быть в курсе последних событий в областях, связанных с GNSS, и наращивать потенциал для использования сигнала multi-GNSS.
Таким образом, конкретные цели внедрения GNSS приоритетной области Программа Организации Объединенных Наций по применению космической техники — это демонстрация и понимание сигналов, кодов, предубеждений и практических применений GNSS, а также последствий предполагаемой модернизации.
Multi-GNSS (многочастотная GNSS) | Технологии | Чипы и модули GPS-приемника
Multi-GNSS (многочастотная GNSS)
Приемник Multi-GNSS (Глобальная навигационная спутниковая система) — это система, способная вычислять положение, скорость и время, принимая спутниковые сигналы, передаваемые из нескольких навигационных спутниковых систем.
Ранее система GPS, управляемая США, была типичной системой позиционирования, но, как показано на диаграмме ниже, в настоящее время работают другие спутниковые навигационные системы, такие как ГЛОНАСС в России, Galileo в Европе, BeiDou (Compass) в Китае вот-вот начнут работу.Кроме того, работает SBAS (Satellite Based Augmentation System), сеть геостационарных спутниковых систем (WAAS Соединенных Штатов, EGNOS Европы, MSAS Японии), а Япония начала работу QZSS (Quasi-Zenith Satellite System).
Источник: цитируется из «Азия Океания -« витрина новой эры GNSS »», представленной на 5-й встрече пользователей QZSS.
(КОГУРЕ, Сатоши г-н, 10 марта 2010 г.)
FURUNO занимается исследованиями и разработкой приемников GPS более 20 лет и постоянно занимается исследованиями в области технологий приема и определения местоположения с использованием сигналов от новых навигационных спутниковых систем.
Сегодня исследования FURUNO сосредоточены на модернизации GPS, Galileo и BeiDou. FURUNO также разработала и произвела приемники QZSS, двухчастотные приемники SBAS и другие приемники спутниковой навигации.
JAXA (Японское агентство аэрокосмических исследований) использует приемники QZSS FURUNO для своих наземных станций мониторинга спутниковой системы Quasi-Zenith.