Устройство и разновидности шины CAN
Именно так выглядит ( в основном) та самая «шина CAN», с которой в последнее время нам придется сталкиваться все чаще и чаще:
фото 1
Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод CAN High (оранжево-черный).
Цвет провода CAN-Low — оранжево-коричневый.
За основной цвет шины CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:
фото 2
CAN-High — желтым цветом
CAN-Low — зеленым цветом
Всего существует несколько разновидностей шин CAN, определяемых выполняемыми ими функциями:
Шина CAN силового агрегата (быстрый канал).
Она позволяет передавать информацию со скоростью) 500 кбит/с и служит для связи между блоками управления (двигатель — трансмиссия)
Шина CAN системы «Комфорт» (медленный канал).
Она позволяет передавать информацию со скоростью 100 кбит/с и служит для связи между блоками управления, входящими в систему «Комфорт».
Шина данных CAN информационно-командной системы (медленный канал), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь между различными обслуживающими системами ( например, телефонной и навигационной системами).
Новые модели автомобилей все более становятся похожими на самолеты — по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и «тянуть» от каждого грозди проводов — нереально.
Поэтому кроме шины CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем «расплываться мыслью по древу», заострим наше внимание пока что на одной конкретной шине: CAN ( по взглядам корпорации BOSCH).
На примере шины CAN силового агрегата можно посмотреть форму сигнала:
фото 3
Когда на High шине CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе Low доминантное состояние, то напряжение падает до 1.5 вольта.
(«Доминанта» — явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название Twisted Pair. А провода, которые образуют эту пару, называются CAN High и CAN Low.
Такое исходное состояние называется «состоянием покоя» или «рецессивом».
Каким образом передаются и преобразуются сигналы по CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:
фото 4
Поступающие по проводам High и Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Кстати, насчет помех. Как говорят, «шина CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение».
Попробуем разобраться с этим.
Провода шины CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:
фото 5
Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – «Pp») вычитается из напряжения
Примечание: По наличию времени статья может иметь продолжение — много еще остается «за кадром».
Кучер В.П.
© Легион-Автодата
Вас также может заинтересовать:
Шина CAN — это страшно?
Шина CAN системы «Комфорт»
Шина данных CAN — небольшая заметка по устройству
что это такое и где находится, устройство и принцип работы, установка и подключение к сигнализации своими руками с фото и видео
CAN шина представляет собой интерфейс, использующийся для более упрощенного управления транспортным средством. Это обеспечивается благодаря обмену данными между разными системами, передача информации производится в зашифрованном виде.
Содержание
[ Раскрыть]
[ Скрыть]
Где находится CAN-шина?
Модуль CAN в машине являет собой сеть датчиков и контроллеров, которые предназначены для объединения всех управляющих устройств в одну систему.
Эта автомобильная технология используется как колодка, с которой можно соединять следующие управляющие блоки:
- «сигналки» — к противоугонной системе может подключаться модуль автоматического запуска двигателя;
- антиблокировочной системы «АБС»;
- механизмов безопасности, в частности, подушек и их датчиков;
- системы управления силовым агрегатом автомобиля;
- приборной комбинации;
- системы круиз-контроля;
- кондиционера и отопительного узла;
- системы управления автоматической трансмиссией и т. д.
CAN-модуль — это устройство, место монтажа которого может отличаться производителем транспортного средства.
Если неизвестно, где расположен интерфейс, этот момент уточняется в сервисной документации к авто, он обычно устанавливается:
- под капотом автомобиля;
- в салоне транспортного средства;
- под контрольной комбинацией.
Технические характеристики
Описание основных свойств системы диагностики и анализа CAN:
- общая скорость технологии при передаче пакетных данных варьируется в районе 1 мб/с;
- если информация передается между блоками управления, то скорость отправки составит около 500 кб/с;
- при функционировании устройства в режиме «Комфорт» передача данных осуществляется при 100 кб/с.
Назначение и функции кан-шины
Если правильно устанавливать и выполнять подсоединение проводов к интерфейсу, то можно обеспечить следующие опции:
- уменьшение параметра воздействия внешних помех на функционирование основных и дополнительных механизмов и узлов;
- возможность выполнить соединение и настраивать любые электронные приборы, в том числе охранные комплексы;
- простой принцип подключения и функционирования дополнительных электронных устройств и приборов, которые имеются в авто;
- более быстрая процедура передачи информации на определенное оборудование и механизмы авто;
- возможность отправки и получения цифровых данных одновременно, а также анализ информации;
- оперативная настройка и подключение опции дистанционного пуска ДВС.
Подробнее о назначении и общих характеристиках CAN-модуля рассказал канал «Crossover 159».
Устройство и принцип работы
По конструкции данный интерфейс выполнен в виде модуля в пластмассовом корпусе или колодки для подсоединения проводников. Цифровая шина включает в себя несколько кабелей CAN. Подключение этого устройства к бортовой сети осуществляется посредством одного проводника.
Шина работает по принципу отправки данных в закодированном виде. Каждое передающееся сообщение обладает специальным уникальным идентификаторов. Может быть информация: «скорость передвижения авто составляет 50 км/ч», «температура охлаждающей жидкости 90 градусов Цельсия» и т. д. При отправке сообщений все электронные блоки получают данные, проверяющиеся идентификаторами. Если информация имеет отношение к определенному модулю, то она обрабатывается, если нет — то игнорируется.
В зависимости от модели, длина идентификатора интерфейса может быть 11 или 29 бит.
Каждое устройство производит считывание информации, передающейся в шину. Передатчик, обладающий более низким приоритетом, должен отпустить шину, так как доминантный уровень искажает его передачу. Если приоритет передающихся пакетов будет более высоким, то он не трогается. Устройство, которое при отправке сообщений потеряло связь, через определенный временной интервал восстановит ее автоматически.
Работа CAN-шины возможна в нескольких режимах:
- Автономный, фоновый или спящий. При включении данного режима все основные агрегаты и узлы выключены и двигатель не заведен. На шину все равно подается напряжение от бортовой сети. Его значение небольшое, что дает возможность не допустить разряда АКБ.
- Пробуждение или запуск интерфейса. В данном режиме устройство начинает работу, это происходит при включении системы зажигания. Если автомобиль оснащен клавише Старт/Стоп, то CAN-шина начинает работу при ее нажатии. Производится включение функции стабилизации напряжения, в результате чего питание начинает поступать на контроллеры и датчики.
- Включение активного режима приводит к началу процесса обмена информацией между исполнительными механизмами и регуляторами. Величина напряжения в сети возрастает, так как шина может потреблять до 85 мА тока.
- Режим отключения или засыпания. При остановке двигателя автомобиля все агрегаты и механизмы, подключенные по CAN-интерфейсу, выключаются. Питание на них перестает подаваться.
Пользователь Valentin Belyaev подробно рассказал о принципе действия цифрового интерфейса.
Преимущества и недостатки
Если автомобиль оснащен цифровым интерфейсом, это обеспечивает следующие плюсы:
- Простота монтажа сигнализации на транспортное средство. Наличие CAN-шины в авто позволяет обеспечить более быстрый и упрощенный алгоритм подключения охранной системы.
- Высокая скорость отправки информации между агрегатами и системами, что обеспечивает быстродействие узлов.
- Хорошая устойчивость к воздействию помех.
- Все цифровые интерфейсы имеют многоуровневую систему контроля. Благодаря этому можно не допустить образования ошибок при отправке и приеме информации.
- Цифровой интерфейс, работая в активном режиме, выполняет разброс скорости по различным каналам самостоятельно. Благодаря этому все системы работают максимально оперативно.
- Безопасность CAN-шины. При попытке получения несанкционированного доступа к автомобилю система может произвести блокировку узлов и агрегатов.
Минусы:
- Некоторые системы обладают ограничениями по объему передающейся информации. Если автомобиль сравнительно новый и оборудован разными электронными устройствами, это приводит к росту нагрузки на канал передачи данных. В результате время отклика увеличивается.
- Большинство передающейся информации по цифровому интерфейсу имеет определенное назначение. На полезные данные в системе предусмотрена небольшая часть трафика.
- Возможна проблема отсутствия стандартизации. Это часто происходит при применении протоколов высших уровней.
Разновидности и маркировка
По типу идентификаторов такие устройства делятся на два вида:
- CAN2, 0A. Это маркировка интерфейсов, которые могут работать в 11-битном формате передачи информации. Данная разновидность устройств не в состоянии определять ошибки импульсов от блоков, которые работают с 29 бит.
- CAN2, 0B. Это маркировка шин, работающих в формате 11 бит. Основная особенность заключается в возможности передачи информации на блоки управления при выявлении 29-битного идентификатора.
В зависимости от области применения, шины разделяются на три класса:
- Для двигателя транспортного средства. При подключении шины обеспечивается максимальная скорость передачи данных и связи между управляющими устройствами. Отправка информации осуществляется по дополнительному каналу. Основное назначение состоит в синхронизации работы микропроцессорного модуля с другими системами. К примеру, антиблокировочным узлом колес, трансмиссией и т. д.
- Цифровые интерфейсы класса Комфорт. Этот класс шин предназначен для взаимодействия с любыми устройствами данного типа. Интерфейс используется для работы с системами электронного изменения положения электрозеркал, узла обогрева кресел, управления люком и т. д.
- Информационно-командные устройства. Они характеризуются аналогичной скоростью при отправке данных. Такие шины обычно применяются для связи между системами, которые требуются для обслуживания автомобиля.
Канал «Diyordie» рассказал о назначении цифрового интерфейса, а также о его разновидностях в автомобиле.
Подключение сигнализации своими руками
Чтобы подключить охранный комплекс к цифровому интерфейсу, надо знать место установки микропроцессорного модуля управления сигнализаций. Это устройство устанавливается под приборной комбинацией машины. Возможен монтаж блока за вещевым ящиком или аудиосистемой.
Необходимые приборы и инструменты
Предварительно надо подготовить:
- тестер для проверки напряжения — мультиметр;
- нож;
- изоленту;
- отвертку с крестовым наконечником.
Пошаговая инструкция
Установка выполняется так:
- Приступая к задаче, надо убедиться в работоспособности противоугонного комплекса. В случае, когда монтаж системы не был выполнен, надо подключить все устройства к блоку управления, а его — к аккумулятору.
- Производится поиск основного кабеля, который идет на цифровой интерфейс. Этот провод всегда толстый и обычно имеет оранжевую оболочку.
- Микропроцессорный модуль противоугонной системы надо подключить к этому проводнику. Для осуществления задачи применяется колодка цифровой шины.
- Если блок управления охранной системы не был установлен, производится его монтаж. Он должен быть размещен в скрытом месте, не подверженном воздействию влаги. При монтаже модуль надежно фиксируется с помощью пластиковых стяжек или саморезов.
- Все места соединения проводов надо заизолировать с применением термоусадочных трубок либо изоленты. После подключения производится диагностика выполненных действий. Если возникли проблемы, надо воспользоваться мультиметром для поиска поврежденного участка.
- На последнем этапе необходимо произвести проверку и настройку всех каналов передачи данных. Если имеются дополнительные каналы, они также настраиваются.
Канал «Гаражный любитель» подробно рассказал об установке и подключении противоугонного комплекса Старлайн с CAN-шиной.
Работа с терминалом
Перед эксплуатацией надо учесть рекомендации по использованию, которые указываются в сервисном руководстве. Предварительно производится настройка устройства.
Варианты настройки
Если используется терминал, есть два варианта настроить работу интерфейса:
- С помощью специальной программы «Конфигуратор» для компьютера. При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.
- Используя команды «CanRegime». Обычно этот вариант применяется для дистанционной настройки с использованием СМС-сообщений. Могут применяться команды, которые отправляются из программного обеспечения для мониторинга.
Подробнее о командах, которые указываются после CanRegime:
- Mode — определяет режим функционирования. Если показана цифра 0 — то цифровой интерфейс отключен, если 1 — используется стандартный фильтр. Цифры 2 и 3 указывают на принадлежность пакетов к 29- либо 11-битному классу.
- BaudRate. Команда предназначена для определения скорости работы цифрового интерфейса. Важно, чтобы этот параметр соответствовал скорости передачи информации в авто.
- TimeOut — определяет время ожидания для каждого сообщения. Если полученная величина слишком низкая, то цифровой интерфейс сможет отловить не все передающиеся сообщения.
Режимы работы
Существует несколько режимов функционирования терминала:
- FMS — в нем автовладелец может узнать общий расход горючего, обороты, пробег транспортного средства, нагрузку на оси, температуру силового агрегата. Допускается получение данные об объеме горючего в баке. Для работы в данном режиме выполняется вход в меню выбора типа фильтров программы «Конфигуратор». Указывается тип режима FMS, скорость цифрового интерфейса, после чего нажимается кнопка «Применить».
- Режим прослушки используется для получения сообщений, передающий через цифровой интерфейс. Чтобы работать с ним, надо зайти в программе в настройки шины CAN и выбрать один из рабочих параметров. Это может быть скорость интерфейса или время ожидания, тип фильтра в данном случае не играет роли. После указания параметров «кликается» клавиша «Прослушать».
- Для привязки информации, полученной посредством прослушивания цифрового интерфейса, используются пользовательские фильтры. После прослушки данных надо выбрать тип фильтрующей технологии (для 11 или 29 бит). Расшифровка данных производится в соответствии с технической документацией.
- Режим тестирования OBD2 используется для сканирования скорости отправки информации, а также класса идентификатора. Чтобы запустить эту функцию, автовладельцу надо подключиться напрямую к цифровому интерфейсу или диагностическому разъему. Включение режима осуществляется посредством входа в меню «Настройка» и выбора опции «Тест OBD2». В результате терминалом начнется отправка запросов с конкретными идентификаторами на различных скоростях интерфейса. Во вкладке «Устройство» можно ознакомиться с извлеченной и расшифрованной информацией.
Настройка мониторингового ПО
После успешного подключения терминала надо произвести диагностику правильности отправки информации. Эти данные передаются на сервер мониторинга.
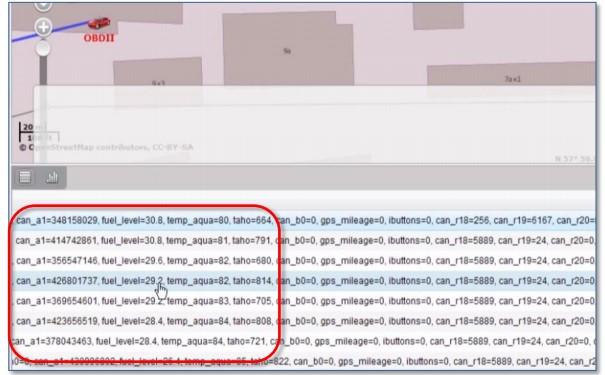 Отображение информации в системе сервера мониторинга
Отображение информации в системе сервера мониторингаСкачать бесплатно инструкцию по установке и пользованию в формате PDF
Загрузить сервисное руководство по монтажу и эксплуатации по ссылкам в таблице.
Можно ли сделать анализатор своими руками?
Для выполнения этой задачи автовладелец должен иметь профессиональные навыки в области электроники:
- Сборка устройства производится по схеме, представленной на первом фото в галерее. Предварительно нужно купить все детали, необходимые для изготовления. Основным компонентов является плата STM32F103С8Т6, оснащенная контроллером. Также потребуется электрическая схема стабилизатора и CAN-трнасивер. Можно использовать устройство МСР2551 или другой аналог.
- Если требуется сделать анализатор более технологичным, в него можно добавить модуль Bluetooth. Благодаря этому автовладелец может сохранять важную информацию в память смартфона.
- Для программирования анализатора используется любое подходящее для этого программное обеспечение. Согласно отзывам, оптимальный вариант — утилиты Arduino или CANHacker. Во второй утилите есть больше опций и имеется функция фильтрации информации.
- Чтобы произвести прошивку, понадобится преобразователь USB-TTL. Это устройство требуется для отладки, при его отсутствии можно использовать ST-Link.
- После загрузки утилиты на компьютер основной файл с расширением ЕХЕ прошивается в блок с применением программатора. Если процедура выполнена успешно, то надо дополнительно установить перемычку на Bootloader. Собранное устройство надо синхронизировать с компьютером, используя USB-провод.
- Следующим этапом будет добавление прошивки в анализатор. Для выполнения задачи потребуется утилита MPHIDFlash.
- После успешного обновления программы кабель от компьютера отключается и снимается перемычка. Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Фотогалерея
Фото схем для самостоятельного изготовления анализатора приведены в этом разделе.
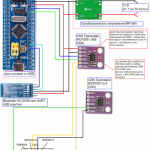 Общая схема для сборки анализаторного устройства
Общая схема для сборки анализаторного устройства 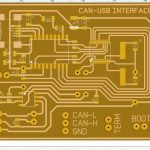 Плата, использующаяся в качестве основы
Плата, использующаяся в качестве основыСколько стоит?
Примерные цены на покупку КАН-устройств приведены в таблице.
| Наименование | Цена, руб |
| CAN-шина | 2000-5000 |
| Цена актуальная для трех регионов: Москва, Челябинск, Краснодар. | |
Видео «Работа с CAN-шиной»
Канал «CAN-Hacker Automotive Data Bus Sollutions» показал способ работы с цифровым интерфейсом на примере автомобиля Рено Каптюр.
CAN-шина в современных автомобилях. Что такое CAN шина? :: SYL.ru
Чтобы связно и гармонично управлять системами, обеспечить качество и функциональность передачи данных, многие автомобилестроительные компании применяют современную систему, известную как CAN-шина. Принцип ее организации заслуживает подробного рассмотрения.
Общая характеристика
Визуально CAN-шина выглядит как асинхронная последовательность. Ее информация передается по двум витым проводникам, радиоканалу или оптоволокну.
Управлять шиной способны несколько устройств одновременно. Их количество не ограничено, а скорость обмена информацией запрограммирована до 1 Мбит/с.
CAN-шина в современных автомобилях регламентируется спецификацией «CAN Sorcjfication version 2,0».
Он состоит из двух разделов. Протокол А описывает передачу информации с применением 11-битной системы передачи данных. Часть В выполняет эти функции при применении 29-битного варианта.
CAN имеет узлы персональных тактовых генераторов. Каждый из них посылает сигналы всем системам одновременно. Получающие устройства, присоединенные к шине, определяют, относится ли сигнал к их компетенции. Каждая система обладает аппаратной фильтрацией адресованных ей посланий.
Разновидности и маркировка
Одной из самых известных на сегодняшний день является разработанная Робертом Бошем CAN-шина. CAN BUS (под таким названием известна система) бывает последовательная, где импульс подается за импульсом. Она называется Serial bus. Если же информация передается по нескольким проводам, то это параллельная шина Parallel bus.
I — узлы управления;
II — коммуникации системы.
Опираясь на разновидности идентификаторов КАН-шин, встречается маркировка двух типов.
В случае, когда узел поддерживает 11-битный формат обмена информацией и не обозначает ошибки на сигналы 29-битного идентификатора, его маркируют «CAN2,0A Active, CAN2,0B Passive».
Когда таковые генераторы используют оба типа идентификаторов, шина имеет маркировку «CAN2,0B Active».
Встречаются узлы, поддерживающие коммуникации в 11-битном формате, а увидев в системе 29-битный идентификатор, выдают сообщение об ошибке. В современных автомобилях подобные CAN-шины не используются, ведь система должна быть логичной и согласованной.
Система же функционирует при двух типах скоростей передачи сигналов — 125, 250 кбит/с. Первые предназначены для вспомогательных устройств (стеклоподъемники, освещение), а вторые обеспечивают главное управление (коробка-автомат, двигатель, ABS).
Передача сигналов
Физически проводник CAN-шины современного автомобиля выполнен из двух составляющих. Первый — черного цвета и называется CAN-High. Второй проводник, оранжево-коричневый, именуется CAN-Low. Благодаря представленной структуре коммуникаций из схемы автомобиля удалена масса проводников. При производстве транспортных средств это позволяет уменьшить вес изделия до 50 кг.
Общая сетевая нагрузка состоит из разрозненных сопротивлений блоков, которые входят в состав протокола, называемого КАН-шина.
Различны и скорости передачи-получения каждой системы. Поэтому обеспечивается обработка разнотипных сообщений. Согласно описанию шины-CAN, эту функцию выполняет преобразователь сигналов. Он называется межсетевым электронным интерфейсом.
Расположен этот прибор в конструкции управляющего блока, но бывает выполнен в виде обособленного прибора.
Представленный интерфейс применяют также для вывода и ввода сигналов диагностического характера. Для этого предусмотрено наличие унифицированной колодки OBD. Это особый разъем для диагностики системы.
Разновидности функций шин
Существуют разные типы представленного устройства.
- КАН-шина агрегата силового. Это быстрый канал, который передает послания со скоростью 500 кбит/с. Его главная задача заключается в коммуникации блоков управления, например трансмиссия-двигатель.
- Система «Комфорт» — более медлительный канал, передающий данные со скоростью 100 кбит/с. Он связывает все устройства системы «Комфорт».
- Информационно-командная программа шины также передает сигналы медленно (100 кбит/с). Ее основное предназначение — обеспечить связь между обслуживающими системами, например телефоном и навигацией.
При изучении вопроса, чем является CAN-шина, может показаться, что по количеству программ она похожа на систему самолета. Однако, дабы обеспечить качество, безопасность и комфорт при управлении автомобилем, никакие программы не будут лишними.
Помехи в шине
Все управляющие блоки присоединены к CAN-шине трансиверами. Они имеют приемники сообщений, представляющих собой избирательные усилители.
Описание шины CAN оговаривает поступление посланий по проводникам High и Low в усилитель дифференциальный, где он обрабатывается и направляется в блок управления.
Усилитель определяет этот выходной сигнал как разность напряжений проводов High и Low. Такой подход позволяет исключить влияние внешних помех.
Чтобы понять, что собой представляет КАН-шина и ее устройство, следует вспомнить ее облик. Это два проводника, скрученные между собой.
Так как сигнал помехи поступает сразу на оба провода, в процессе обработки значение напряжения Low отнимается от напряжения High.
Далее из полученного показателя извлекается базовое напряжение, которое составляет 2,5 В. Остаток и есть помеха. Она в отфильтрованном сигнале не присутствует.
Благодаря этому CAN-шина считается надежной системой.
Типы сообщений
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
- Data Frame. Такой тип сообщений (фреймов) передает сигналы с определенным идентификатором.
- Error Frame представляет собой сообщение сбоя в процессе обмена. Он предлагает повторить действия сначала.
- Overload Frame. Послание появляется в момент необходимости перезапустить работу контроллера.
- Request Frame Remout Transmission обозначает запрос данных, где именно находится идентификатор.
I — CAN-шина;
II — резистор сопротивления;
III — интерфейс.
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Функциональность системы
Чтобы понять, что такое CAN-шина, следует разобраться в ее функциональном назначении.
Она призвана передавать фреймы в реальном времени, которые содержат информацию о значении (например, перемена скорости) или о возникновении события от одного узла-передатчика к приемникам программы.
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Ключевое значение придается переменной показателя. Если в сообщении нет данных о времени, тогда это сообщение принимается системой по факту его получения.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Разрешение конфликтов на шине
Когда сигналы, поступающие на шину, приходят на несколько контроллеров, система выбирает, в какой очередности будет обработан каждый. Два или более устройства могут начать работу практически одновременно. Чтобы при этом не возник конфликт, производится мониторинг. CAN-шина современного автомобиля производит эту операцию в процессе отправки сообщения.
Существует градация сообщений по приоритетной и рецессивной градации. Информация, имеющая самое низкое числительное выражение поля арбитража, выиграет при наступлении конфликтного положения на шине. Остальные передатчики постараются отослать свои фреймы позже, если ничего не изменится.
В процессе передачи информации время, указанное в нем, не теряется даже при наличии конфликтного положения системы.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
Чтобы понять, что такое КАН-шина, следует изучить ее компоненты. Максимальная длина проводника при скорости 1 Мбит/с достигает 40 м. Шина- CAN (известная еще как CAN-BUS) в конце наделена терминатором.
Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом. Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Технология iCAN
Рассматривая шины транспортного средства, следует уделить внимание программе блокировки работы двигателя.
Для этого разработан обмен данными посредством шины CAN, iCAN-модулем. Он подключается к цифровой шине и отвечает за соответствующую команду.
Имеет небольшие габариты и присоединяется к любому отделению шины. При старте движения автомобиля iCAN посылает команду соответствующим блокам, и мотор глохнет. Преимуществом данной программы является отсутствие разрыва сигнала. Существует инструктирование электронного блока, после этого сообщение отключает функционирование соответствующих исполнительных элементов.
Этот тип блокировки характеризуется наивысшей скрытностью, а потому и надежностью. При этом ошибки не записываются в память ЭБУ. CAN-шина предоставляет всю информацию о скорости, движении автомобиля данному модулю.
Защита от угона
Модуль iCAN устанавливается в каком угодно узле, где расположены жгуты, в месте установки шины. Из-за минимальных габаритов и особого алгоритма действий выявить блокировку обычными методами при совершении угона практически нереально.
Внешне этот модуль маскируется под разные контролирующие датчики, что также делает невозможным его обнаружение. При желании возможно настроить работу прибора для автоматической защиты им стекол автомобиля, зеркал.
При наличии у транспортного средства автозапуска двигателя, iCAN не помешает его работе, так как срабатывает при старте движения.
Ознакомившись с устройством и принципами обмена данными, которой наделена CAN-шина, становится понятным, почему все современные автомобили применяют эти технологии при разработке управления транспортным средством.
Представленная технология по своему устройству довольно сложна. Однако все заложенные в нее функции обеспечат максимально эффенктивное, безопасное и комфортное управление автомобилем.
Существующие разработки помогут обеспечить защиту транспортного средства даже от угона. Благодаря этому, а также комплексу других фунций, шина-CAN популярна и востребована.
Как работает CAN шина в современном авто
Для того, чтобы понять принципы работы CAN-шины мы решили написать/перевести ряд статей, посвященных этой тематике, как обычно, основываясь на материалах зарубежных источников.
Одним из подобных источников, который, как нам показалось, вполне подходящим образом иллюстрирует принципы работы CAN-шины, стал видеоролик-презентация учебного продукта CANBASIC компании Igendi Engineering (http://canbasic.com).
Также можете прочитать вторую нашу переводную статью Введение в CAN.
Добро пожаловать на презентацию нового продукта CANBASIC, учебной системы (платы), посвященной вопросу функционирования шины КАН (CAN).
Мы начнем с основ построения сети CAN-шины. На схеме приведен автомобиль с его системой освещения.

Показана обычная проводка, в которой каждая лампа напрямую подключена с каким-либо переключателем или контактом педали тормоза.

Теперь аналогичная функциональность показана с применением технологии CAN-шины. Передние и задние световые приборы подключены к контролирующим модулям. Контролирующие модули соединены параллельно с такими же проводами шины.

Этот небольшой пример демонстрирует, что объем электропроводки снижается. Вдобавок ко всему модули управления могут обнаруживать перегоревшие лампы и информировать об этом водителя.
Автомобиль на указанном виде содержит четыре модуля управления и четко отражает построение учебной системы (платы) CANBASIC

В вышеописанном указано четыре узла шины (CAN-узла).
Передний модуль контролирует передние световые приборы.
Узел сигнализации обеспечивает контроль внутренней части автомобиля.
Основной контрольный модуль соединяет все системы транспортного средства для диагностики.
Задний узел контролирует задние световые приборы.
На тренировочной доске CANBASIC вы можете увидеть маршрутизацию (расположение) трех сигналов: «Питание», «CAN-Hi» и «земли», соединяющихся в контрольном модуле.

В большинстве транспортных средств для подключения главного модуля управления к ПК с помощью диагностического программного обеспечения вам нужен OBD-USB конвертер.

Плата CANBASIC уже содержит в себе OBD-USB конвертер и может быть напрямую подключена к ПК.
Питается плата от интерфейса USB, поэтому дополнительные кабели не нужны.

Провода шины используются для передачи множества данных. Как это работает?
Как работает CAN-шина
Эти данные передаются последовательно. Вот пример.
Человек с лампой, передатчик, хочет отправить какую-то информацию человеку с телескопом, получателю (приемнику). Он хочет передать данные.

Для того, чтобы сделать это они договорились, что получатель смотрит за состоянием лампы каждые 10 секунд.

Это выглядит так:



Спустя 80 секунд:

Теперь 8 бит данных были переданы со скоростью 0,1 бит в секунду (т.е. 1 бит в 10 секунд). Это называется последовательной передачей данных.

Для использования этого подхода в автомобильном приложении интервал времени сокращается с 10 секунд до 0,000006 секунды. Для передачи информации посредством изменения уровня напряжения на шине данных.

Для измерения электрических сигналов шины КАН используется осциллограф. Две измерительных площадки на плате CANBASIC позволяют измерить этот сигнал.

Чтобы показать полное CAN-сообщение разрешение осциллографа уменьшается.

В результате одиночные CAN-биты больше не могут быть распознаны. Для решения этой проблемы CANBASIC-модуль оснащен цифровым запоминающим осциллографом.
Мы вставляем модуль CANBASIC в свободный разъем USB, после чего он будет автоматически обнаружен. Программное обеспечение CANBASIC можно запустить прямо сейчас.

Вы можете видеть вид программного осциллографа с прикрепленными значениями битов. Красным показаны данные, переданные в предыдущем примере.
Чтобы объяснить другие части CAN-сообщения мы раскрашиваем CAN-кадр и прикрепляем на него подписи с описанием.

Каждая раскрашенная часть CAN-сообщения соответствует полю ввода того же цвета. Область, отмеченная красным, содержит информацию о пользовательских данных, которая может быть задана в формате битов, полубайтов или шестнадцатиричном формате.
Желтая область определяет количество пользовательских данных. В зеленой зоне может быть установлен уникальный идентификатор.
Синяя область позволяет задать CAN-сообщение для удаленного запроса. Это означает, что будет ожидаться ответ от другого CAN-узла. (Разработчики системы сами рекомендуют не пользоваться удаленными запросами по ряду причин приводящих к глюкам системы, но об этом будет другая статья.)
Многие системы с шиной CAN защищены от помех вторым каналом CAN-LO для передачи данных, который является инвертированным относительно сигнала CAN-HI (т.е. идет тот же сигнал, только с обратным знаком).

Шесть последовательных битов с одинаковым уровнем определяют конец CAN-кадра.

Так совпало, что другие части CAN-кадра могут содержать более пяти последовательных битов с одинаковым уровнем.

Чтобы избежать этой битовой метки, если появляется пять последовательных битов с одинаковым уровнем, в конце CAN-кадра вставляется противоположный бит. Эти биты называют стафф-битами (мусорными битами). CAN-приемники (получатели сигнала) игнорируют эти биты.

С помощью полей ввода могут быть заданы все данные КАН-кадра и поэтому каждое КАН-сообщение может быть отправлено.
Вставленные данные немедленно обновляются в CAN-кадре, в данном примере длина данных будет изменена с одного байта на 8 байтов и сдвинута назад на один байт.

Текст описания показывает, что сигнал поворота будет управляться с помощью идентификатора «2С1» и бит данных 0 и 1. Все биты данных сбрасываются на 0.

Идентификатор установлен в значение «»2С1». Для активации сигнала поворотов бит данных должен быть установлен с 0 на 1.

В режиме «в салоне» вы можете управлять всем модулем с помощью простых щелчков мыши. Данные CAN устанавливаются автоматически в соответствии с желаемым действием.
Лампы поворотников могут быть установлены на ближний свет для работы в качестве ДХО. Яркостью будет управлять широтно-импульсная модуляция (ШИМ), в соответствии с возможностями современной диодной техники.
Теперь мы можем активировать фары ближнего света, противотуманные фары, стоп-сигналы и фары дальнего.

С отключением ближнего света противотуманные фары также отключаются. Логика управления световой системой CANBASIC соответствует автомобилям марки Volkswagen. Особенности зажигания и «возвращения домой» также включены.
С сигнальным узлом вы можете считывать сигнал датчика после инициирующего удаленного запроса.
В режиме удаленного запроса второй CAN-кадр будет принят и показан ниже отправленного CAN-кадра.

Байт данных CAN теперь содержит результат измерения датчика. С приближением к датчику пальца вы можете изменить измеренное значение.

Клавиша паузы замораживает текущий CAN-кадр и позволяет провести точный анализ.
Как уже было показано, различные части CAN-кадра могут быть скрыты.

Кроме того поддерживается скрытие каждого бита в КАН-кадре.
Это очень полезно, если вы хотите использовать представление CAN-кадра в ваших собственных документах, например в листе упражнений.

Использование шины CAN: как программно управлять автомобилем
Использование шины CAN: как программно управлять автомобилем
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.
Автор: Ariel Nuñez
Изменение температуры кондиционера Ford Fusion при помощи команд через шину CAN.
Рисунок 1: Как при помощи приложения управлять ключевыми функциями автомобиля?
Недавно я вместе со своими друзьями из компании Voyage работал над реализацией программного управления системой кондиционирования в Ford Fusion. На данный момент Voyage занимается разработкой бюджетных самоуправляемых автомобилей. Конечная цель: чтобы каждый смог вызвать автомобиль к своей входной двери и безопасно путешествовать туда, куда вздумается. В компании Voyage считают крайне важной возможностью предоставление доступа к ключевым функциям автомобиля с заднего кресла, поскольку не за горами тот день, когда работа водителя будет полностью автоматизирована.
Зачем нужна шина CAN
Современные автомобили используют множество систем управления, которые во многих случаях функционируют подобно микро-службам в веб-разработке. Например, подушки безопасности, тормозные системы, регулирование скорости движения (круиз контроль), электроусилитель руля, аудиосистемы, управление окнами и дверями, подстройка стекл, системы зарядки для электрических автомобилей и т. д. Эти системы должны уметь осуществлять коммуникацию и считывать параметры друг друга. В 1983 в компании Bosch началась разработка шины CAN (Controller Area Network; Локальная сеть контролеров) для решения этой сложной задачи.
Можно сказать, что шина CAN представляет собой простую сеть, где каждая система автомобиля может считывать и отсылать команды. Эта шина интегрируется все сложные компоненты элегантным образом, что дает возможность реализовать всеми любимые функции автомобиля, которыми мы пользуемся.
Рисунок 2: Впервые шина CAN стала использоваться в 1988 году в БМВ 8 серии
Самоуправляемые автомобили и шина CAN
Поскольку интерес к разработке самоуправляемых автомобилей серьезно вырос, соответственно, словосочетание «шина CAN» также становится популярным. Почему? Большинство компаний, создающих самоуправляемых автомобилей, не занимаются производством с нуля, а пытаются научиться программно управлять машинами после выхода с конвейера фабрики.
Понимание внутреннего устройства шины CAN, используемой в автомобиле, позволяет инженеру формировать команды при помощи программного обеспечения. Самые нужные команды, как вы можете догадаться, связаны с управлением рулем, ускорением и торможением.
Рисунок 3: Введение в LIDAR (ключевой сенсор самоуправляемого автомобиля)
При помощи сенсоров наподобие LIDAR (light detecting and ranging; оптическая локационная система) машина способна смотреть на мир как суперчеловек. Затем компьютер внутри автомобиля на базе полученной информации принимает решения и посылается команды в шину CAN для управления рулем, ускорение и торможением.
Не каждый автомобиль способен стать самоуправляемым. И по некоторым причинам компания Voyage выбрала модель Ford Fusion (подробнее о причинах можно почитать в этой статье).
Исследование шины CAN в Ford Fusion
Перед началом исследования систем кондиционирования воздуха в Ford Fusion я открыл мою любимую книгу The Car Hacker’s Handbook. Перед погружением в суть вопроса заглянем в Главу 2, где описываются три важные концепции: протоколы шины, шина CAN и CAN-фреймы.
Шина CAN
Шина CAN начала использоваться в американских легковых машинах и небольших грузовиках с 1994 года и с 2008 года в обязательном порядке (в европейских автомобилях с 2001 года). В этой шине предусмотрено два провода: CAN high (CANH) и CAN low (CANL). Шина CAN использует дифференциальный сигналинг, суть которого заключается в том, что при поступлении сигнала на одном проводе вольтаж повышается, а на другом понижается на одну и ту же величину. Дифференциальный сигналинг используется в средах, которые должны быть малочувствительны к шуму, например, в автомобильных системах или при производстве.
Рисунок 4: Необработанный сигнал шины CAN, отображаемый на осциллографе
С другой стороны, пакеты, передаваемые по шине CAN, не стандартизированы. Каждый пакет содержит 4 ключевых элемента:
- Арбитражный ID (ArbitrationID) представляет собой широковещательно сообщение, идентифицирующее устройство, которое пытается начать коммуникацию. Любое устройство может отсылать несколько арбитражных ID. Если в единицу времени по шине отсылаются два CAN-пакета, пропускается тот, у которого ниже арбитражный ID.
- Расширение идентификатора (Identifierextension; IDE) – в случае с шиной CAN стандартной конфигурации этот бит всегда равен 0.
- Код длины данных (Datalengthcode; DLC) определяет размер данных, который варьируется от 0 до 8 байт.
- Данные. Максимальный размер данных, переносимых стандартной шиной CAN, может быть до 8 байт. В некоторых системах происходит принудительное дополнение пакета до размера 8 байт.
Рисунок 5: Формат стандартных CAN-пакетов
CAN фреймы
Для того чтобы включить / выключить климатическую систему мы должны найти нужную шину CAN (в автомобиле таких шин несколько). В Ford Fusion есть как минимум 4 задокументированные шины. 3 шины работают на высокой скорости 500 кбит/с (High Speed CAN; HS) и 1 шина на средней скорости 125 кбит/с (Medium Speed CAN; MS).
К порту OBD-II подключено две высокоскоростные шины HS1 и HS2, однако там стоит защита, которая не позволяет подделывать команды. Вместе с Аланом из компании Voyage мы вынули порт OBD-II и нашли места соединения со всеми шинами (HS1, HS2, HS3 и MS). На задней стенке OBD-II все шины подключались к модулю шлюза (Gateway Module).
Рисунок 6: Homer – первое самоуправляемое такси от компании Voyage
Поскольку климатическая система управляется через медиа-интерфейс (SYNC), нам придется отсылать команды через среднескоростную шину (MS).
Чтение и запись CAN-пакетов осуществляется при помощи драйвера и сетевого стека SocketCAN, созданного исследовательским отделом компании Volkswagen для ядра в Linux.
Мы будем подсоединять три провода от машины (GND, MSCANH, MSCANL) к переходнику Kvaser Leaf Light HSv2 (можно купить за 300$ на Амазоне) или к CANable (продается за 25$ на Tindie) и загружать на компьютере со свежим Linux-ядром шину CAN в качестве сетевого устройства.
modprobe can
modprobe kvaser_usb
ip link set can0 type can bitrate 1250000
ifconfig can0 up
После загрузки запускаем команду candump can0 и начинаем отслеживать трафик:
can0 33A [8] 00 00 00 00 00 00 00 00 can0 415 [8] 00 00 C4 FB 0F FE 0F FE can0 346 [8] 00 00 00 03 03 00 C0 00 can0 348 [8] 00 00 00 00 00 00 00 00 can0 167 [8] 72 7F FF 10 00 19 F8 00 can0 3E0 [8] 00 00 00 00 80 00 00 00 can0 167 [8] 72 7F FF 10 00 19 F7 00 can0 34E [8] 00 00 00 00 00 00 00 00 can0 358 [8] 00 00 00 00 00 00 00 00 can0 3A4 [8] 00 00 00 00 00 00 00 00 can0 216 [8] 00 00 00 00 82 00 00 00 can0 3AC [8] FF FF FF FF FF FF FF FF can0 415 [8] 00 00 C8 FA 0F FE 0F FE can0 083 [8] 00 00 00 00 00 01 7E F4 can0 2FD [8] D4 00 E3 C1 08 52 00 00 can0 3BC [8] 0C 00 08 96 01 BB 27 00 can0 167 [8] 72 7F FF 10 00 19 F7 00 can0 3BE [8] 00 20 AE EC D2 03 54 00 can0 333 [8] 00 00 00 00 00 00 00 00 can0 42A [8] D6 5B 70 E0 00 00 00 00 can0 42C [8] 05 51 54 00 90 46 A4 00 can0 33B [8] 00 00 00 00 00 00 00 00 can0 42E [8] 93 00 00 E1 78 03 CD 40 can0 42F [8] 7D 04 00 2E 66 04 01 77 can0 167 [8] 72 7F FF 10 00 19 F7 00 can0 3E7 [8] 00 00 00 00 00 00 00 00 can0 216 [8] 00 00 00 00 82 00 00 00 can0 415 [8] 00 00 CC F9 0F FE 0F FE can0 3A5 [8] 00 00 00 00 00 00 00 00 can0 3AD [8] FF FF FF FF FF FF FF FF can0 50B [8] 1E 12 00 00 00 00 00 00
Несмотря на то, что вышеуказанная информация эквивалентна амплитуде звукового сигнала, довольно трудно понять, что происходит, и обнаружить какие-либо закономерности. Нам нужно нечто похожее на частотный анализатор, и такой эквивалент есть в виде утилиты cansniffer. Cansniffer показывает список идентификаторов и позволяет отслеживать изменения в секции данных внутри CAN-фрейма. По мере того как мы будем изучать определенные идентификаторы, мы можем установить фильтр нужных ID, которые имеют отношение к нашей задаче.
На рисунке ниже показан пример информации, снятой при помощи cansniffer с шины MS. Мы отфильтровали все, что имеет отношение к идентификаторам 355, 356 и 358. После нажатия и отпускания кнопок, связанных с подстройкой температуры, в самом конце появляется значение 001C00000000.
Рисунок 7: Информация с шины MS, снятая при помощи утилиты cansniffer
Далее необходимо объединить функционал для управления климатической системой с компьютером, работающим внутри автомобиля. Компьютер работает на операционной системе ROS (Robot Operating System; Операционная система для роботов). Поскольку мы используем SocketCAN, то модуль socketcan_bridge серьезно упрощает задачу по преобразованию CAN-фрейма в блок информации, понимаемый операционной системой ROS.
Ниже показан пример алгоритма декодирования:
if frame.id == 0x356:
raw_data = unpack('BBBBBBBB', frame.data)
fan_speed = raw_data[1] / 4
driver_temp = parse_temperature(raw_data[2:4])
passenger_temp = parse_temperature(raw_data[4:6])
Полученные данные хранятся в CelsiusReport.msg:
bool auto
bool system_on
bool unit_on
bool dual
bool max_cool
bool max_defrost
bool recirculation
bool head_fan
bool feet_fan
bool front_defrost
bool rear_defrost
string driver_temp
string passenger_temp
После нажатия всех нужных кнопок в машине, у нас появляется следующий список:
CONTROL_CODES = {
'ac_toggle': 0x5C,
'ac_unit_toggle': 0x14,
'max_ac_toggle': 0x38,
'recirculation_toggle': 0x3C,
'dual_temperature_toggle': 0x18,
'passenger_temp_up': 0x24,
'passenger_temp_down': 0x28,
'driver_temp_up': 0x1C,
'driver_temp_down': 0x20,
'auto': 0x34,
'wheel_heat_toggle': 0x78,
'defrost_max_toggle': 0x64,
'defrost_toggle': 0x4C,
'rear_defrost_toggle': 0x58,
'body_fan_toggle': 0x04,
'feet_fan_toggle': 0x0C,
'fan_up': 0x2C,
'fan_down': 0x30,
}Затем эти строки отсылаются на узел под управлением операционной системы ROS и далее происходит трансляция в коды, понимаемые автомобилем:
rostopic pub /celsius_control celsius/CelsiusControl ac_toggle
Заключение
Теперь мы можем создавать и посылать те же самые коды в шину CAN, которые формируются при нажатии физических кнопок, связанных с повышением и понижением температуры, что дает возможность удаленного изменения температуры автомобиля при помощи приложения, когда мы находимся на заднем сидении автомобиля.
Рисунок 8: Удаленное управление климатической системой автомобиля
Это лишь небольшой шаг при создании самоуправляемого такси вместе со специалистами компании Voyage. Я получил массу положительных эмоций во время работы над этим проектом. Если вы тоже интересуетесь этой темой, можете ознакомиться со списком вакансий в компании Voyage.
Зачем нужны Can Lin в автосигнализации.
Часто в характеристиках авто сигнализации можно увидеть фразу Can Lin шина. На пальцах разбираем зачем это нам нужно.
CAN и LIN шина- что это такое.
Во – первых? что такое шина.
Шина – в данном случае, это не часть колеса. Назовем её просто автомобильный интернет.
Но интернет для своих устройств.
До 1991 года в автомобилях не было подобной сети. От каждого электрического устройства к кнопке или рычагу управления тянулся свой кабель. А таких устройств было больше сотни.
Каждая лампочка, поворотник, подсветка салона, габариты ближний свет и дальний свет – имели свой кабель. Разнообразные датчики двигателя, температуры, индикация открытых дверей и капота, лючка бензобака. От каждого такого электронного устройства тянулся свой кабель. Всё это привело к тому, что электрика автомобиля стала похожа на паутину гигантского паука, а длина кабелей стала исчисляться Километрами.
Чем больше электронных устройств стало появляться в автомобиле (и не только), тем более очевиден становился вопрос организации всей этой паутины. Для упрощения работы всех систем и возникли CAN Шина, а так же Lin Шина. Последняя используется в- основном на отечественных автомобилях.
Конечно, электрифицированные элементы приобрели цифровой голос, а не аналоговый, как раньше, и стало возможным соединять эти устройства как бы гирляндой (Lin шина). Каждый элемент в эту сеть телеграфировал о своем статусе и принимал команды.
Благодаря этому, стало возможно разместить в автомобиле компьютер, который бы собирал, анализировал данные и с него же происходило бы всё управление. Ну и конечно же автопроизводители сэкономили на количестве кабелей.
Не будем вдаваться в сложные технические детали как работает этот автомобильный интернет.
Поговорим об авто сигнализации.
Если в автомобиле есть Can или Lin Шина, мы можем подключиться к интернету автомобиля и считать, например, такие данные
— какая из дверей открыта
— включены ли фары
— заведен ли двигатель
— повернут ли ключ зажигания
— какое напряжение в аккумуляторе
— подняты ли стекла
— сработал ли датчик удара или крена
И многое другое. В- общем мы можем считать показатели всех устройств и отдать им команду. Например, чтобы замигали фары, включилась сирена, перестал работать двигатель.
То есть наличие такой шины в автомобиле дает нам в первую очередь разнообразные комфортные сервисы и простое дистанционное управление автомобилем. Мы можем посмотреть, закрыты ли двери, получить от автомобиля информацию о том, что кто –то толкает автомобиль, заблокировать работу какого либо агрегата.
В дополнении к этому, мы можем скрыто установить авто сигнализацию, почти в любую точку гирлянды, так что у угонщика уйдет очень много времени на поиск и обезвреживание заветной коробочки, а это самое важное. Ведь угоны должны осуществляться быстро.
Что же делать если в автомобиле нет такой шины? Придется ставить дополнительные датчики, тянуть больше кабелей. Охранная система уже будет сложнее и состоять из бОльшего количества устройств и, как правило, и, скорее всего, не будет иметь самого продвинутого функционала.
Большое количество современных автомобилей оборудовано подобными шинами. Однако каждый производитель часто привносит в систему что-то своё.
Представьте себе. Мы подключились к этому автомобильному интернету. Что дальше?
Теперь у нас есть уши и голос, однако мы находимся на площади европейского города. Да ещё и иностранцы говорят на разных языках, и злыдни, никак не хотят нас учить своему языку, делая из этого строжайший секрет (например, Форд Мерседесу не друг, а конкурент). Вот и приходится по – одному «брать языка», и для каждой марки и каждой модели выпытывать свой язык общения.
У каждого производителя охранных систем есть свой набор марок и моделей, для которых найден общий язык.
Этот список постоянно расширяется и дополняется.
Резюмируя выше сказанное- наличие в Вашем автомобиле такой шины существенно облегчает установку авто сигнализации и как следствие удешевляет стоимость системы и установки.
Подобрать авто сигнализацию исходя из марки и модели Вашего автомобиля.
Смотреть автосигнализации с CAN
Смотреть автосигнализации с LIN
Смотреть автосигнализации с CAN+LIN
Удачи Вам на дорогах и пусть Ваш автомобиль будет под надежной защитой.
Получить бесплатную консультацию
Поделитесь, если статья была полезна
Твитнуть
Поделиться
Поделиться
Отправить
Понимание систем CAN-Bus в автомобилях
Что такое CAN-Bus?
CAN-Bus (шина управляемой сети) — это система связи, которая позволяет различным электрическим компонентам современного автомобиля обмениваться данными.
В современном автомобиле может быть до 70 электронных блоков управления (ЭБУ). Обычно самый большой процессор — это модуль управления двигателем, в то время как другие используются для трансмиссии, подушек безопасности, антиблокировочной системы тормозов / ABS, электроусилителя руля, аудиосистем, окон, дверей и т. Д.
Система CAN-Bus позволяет всем этим различным компонентам связываться друг с другом, управлять другими частями и получать обратную связь от датчиков. Это также означает, что требуется гораздо меньше кабелей, даже с учетом растущего списка электроники, используемой в новых автомобилях. И связь между компонентами быстрее, чем в традиционной системе.
Операционные системыCAN-Bus теперь распространены в новых транспортных средствах, многие модели, начиная с середины 2000-х годов, имеют хотя бы часть управления CAN-Bus.Это включает в себя большинство основных производителей автомобилей, таких как Audi, BMW, Nissan, Honda и Toyota.
Однако, как вы понимаете, установка традиционных послепродажных средств защиты (или других электронных устройств) в автомобиль, оборудованный шиной CAN, может занять много времени и быть трудной.
Решения AVS CAN-Bus
AVS предлагает два решения для автомобилей, оборудованных шиной CAN:
Цифровая автомобильная сигнализация AVS C-Series с шиной CAN
Выберите из нашей линейки цифровых сигнализаций CAN-Bus AVS C-Series, которые предлагают бесшовную интеграцию в заводскую систему вашего автомобиля.Управляемые заводским пультом дистанционного управления автомобиля, они предлагают отличные функции безопасности с преимуществами интеграции CAN-Bus.
Сертифицированная по стандартам автомобильная сигнализация AVS с транслятором CAN-Bus
Выберите из диапазонов сигналов тревоги, сертифицированных стандартами A-Series и S-Series, которые можно безопасно установить с помощью преобразователя AVS CAN-Bus. Это означает, что вы можете пользоваться функциями вашей любимой автомобильной сигнализации AVS с рейтингом Star Rated, отвечая требованиям любой страховой компании, и управлять сигнализацией с заводского пульта дистанционного управления.
Обе эти опции позволяют легко и безопасно установить автомобильную сигнализацию AVS в автомобиль с CAN-шиной, поскольку система CAN-Bus предоставляет большую часть информации, необходимой для сигнализации, например, информацию об открытии двери.
Программирование марки и модели автомобиля выполняется установщиком во время установки. Также намного меньше проводов для подключения, что упрощает установку. Эти системы не мешают работе операционной системы автомобиля и обеспечивают беспроблемную работу с преимуществами улучшенных функций безопасности.
.Где находится CAN-шина? У меня было …
Я не вижу информации о коде для U0014. U0001 — для PCM, теряющего связь по линии шины C. Я бы порекомендовал вам отнести его в магазин или дилерский центр для правильной диагностики. Любой модуль в этой цепи, который выходит из строя, может вывести из строя остальные модули. Вот описание системы CAN-Bus.СВЯЗЬ
ОПИСАНИЕ
Первичной бортовой сетью связи между микропроцессорными электронными модулями управления в этой модели является система шин данных Controller Area Network (CAN).Однако на моделях с дополнительным 1,6-литровым двигателем модуль управления трансмиссией (PCM) использует систему шин данных с программируемым коммуникационным интерфейсом (PCI) DaimlerChrysler в сочетании с шиной CAN для формирования системы гибридной шины. Сеть шины данных сводит к минимуму количество избыточных проводных соединений; и, в то же время, снижает сложность жгутов проводов, токовых нагрузок датчиков и аппаратного обеспечения контроллера, позволяя каждому чувствительному устройству подключаться только к одному модулю (также называемому узлом). Каждый узел считывает, а затем передает данные своих датчиков по шине для использования всеми остальными узлами, которым требуются эти данные.Каждый узел игнорирует сообщения на шине, которые он не может использовать.
Шина CAN — это двухпроводная мультиплексная система, а шина PCI — однопроводная мультиплексная система. Мультиплексирование — это любая система, которая позволяет передавать несколько сообщений по одному каналу или цепи. Шина CAN используется для связи между всеми узлами автомобиля, за исключением моделей с двигателем 1,6 л, где PCM использует шину PCI. Кроме того, некоторые автомобили также могут быть оснащены последовательным интерфейсом контроллера (SCI) или последовательной шиной K-Line для обеспечения прямого диагностического доступа между диагностическим сканером, подключенным к стандартному 16-контактному разъему передачи данных (DLC). расположены под приборной панелью со стороны водителя и некоторыми узлами трансмиссии.
Фактически в автомобиле используются три отдельные системы шины CAN. Они обозначаются: CAN-B, CAN-C и диагностический CAN-C. Системы CAN-B и CAN-C обеспечивают бортовую связь между всеми узлами в автомобиле. CAN-C является более быстрой из двух систем, обеспечивающих связь в режиме, близком к реальному времени (500 Кбит / с), но менее отказоустойчив, чем система CAN-B. CAN-C используется исключительно для связи между критически важными узлами трансмиссии и шасси. Чем медленнее (83.3 Кбит / с), но для связи между кузовом и внутренними узлами используется более отказоустойчивая система CAN-B. Отказоустойчивость CAN-B обусловлена его способностью вернуться в режим однопроводной связи при неисправности проводки шины.
Дополнительная скорость шины данных CAN во много раз выше, чем у предыдущих систем шин данных. Эта дополнительная скорость облегчает добавление большего количества электронных модулей или узлов управления и включение многих новых электрических и электронных функций в автомобиль.Диагностическая шина CAN-C также способна передавать данные со скоростью 500 кбит / с и иногда неофициально называется системой CAN-D, чтобы отличать ее от другой высокоскоростной шины CAN-C. Диагностический CAN-C используется исключительно для передачи диагностической информации между полностью интегрированным силовым модулем / центральным шлюзом (TIPM или TIPMCGW) и диагностическим сканирующим прибором, подключенным к DLC.
ПРИМЕЧАНИЕ. Шлюз 1,6 л устанавливается только на автомобили, отправляемые в Европу. Не существует внутреннего применения 1.6л. TIPM по-прежнему является основным шлюзом CAN, дополнительный шлюз идет от CAN C к J-1850 для контроллера трансмиссии 1,6 л.
Все модели имеют центральный шлюз CAN или модуль концентратора, встроенный в TIPM, который подключен ко всем трем шинам CAN. ТИПМ находится в моторном отсеке рядом с аккумулятором. Этот шлюз физически и электрически изолирует CAN-шины друг от друга и координирует двунаправленную передачу сообщений между ними. На моделях с двигателем 1,6 л отдельный специализированный модуль шлюза, прикрепленный к полу под передним сиденьем водителя в салоне, координирует двунаправленную передачу сообщений между линией шины PCI от PCM и шиной CAN, подключенной ко всем. других узлов в автомобиле.
ОПЕРАЦИЯ
Шина данных Controller Area Network (CAN) или система гибридных шин, которая объединяет шину данных Programmable Communications Interface (PCI) с шиной CAN, позволяет всем электронным модулям или узлам, подключенным к шине, обмениваться информацией друг с другом. Независимо от того, исходит ли сообщение от модуля на низкоскоростной шине PCI или CAN-B или на высокоскоростной шине CAN-C или CAN-D, структура и макет сообщения аналогичны, что позволяет использовать Totally Integrated Power Module / Central GateWay (TIPM или TIPMCGW) для обработки и передачи сообщений между шинами.TIPM также сохраняет диагностический код неисправности (DTC) для определенных неисправностей шинной сети.
Все модули (также называемые узлами) передают и принимают сообщения по одной из этих шин, либо по однопроводной шине PCI, либо по двухпроводной шине CAN. Обмен данными между узлами достигается последовательной передачей сообщений с кодированными данными. Каждый узел может одновременно отправлять и получать последовательные данные. Сообщения шины передаются по шине данных в форме сигналов с переменной шириной импульса (VPWM), которые, когда импульсы высокого и низкого напряжения соединяются вместе, формируют сообщение.Каждый узел использует арбитраж для сортировки приоритета сообщения, если два конкурирующих сообщения пытаются транслировать одновременно.
Сеть напряжения, используемая для передачи сообщений, требует смещения и согласования. Каждый модуль в сети шины обеспечивает собственное смещение и согласование. Каждый узел завершает шину через согласующий резистор и оконечный конденсатор. На шине есть два типа узлов. Доминирующий узел завершает шину через резистор мощностью 1 кВт и конденсатор емкостью 3300 пФ, что обычно дает оконечное сопротивление около 3300 Ом.Однако это значение сопротивления может несколько отличаться в зависимости от области применения. TIPM (или TIPMCGW) — единственный доминирующий узел в этой сети. Недоминантный (или рецессивный) узел завершает шину через резистор на 11 кВт и конденсатор 330 пФ, что обычно приводит к оконечному сопротивлению около 10800 Ом.
ПРОГРАММИРУЕМЫЙ ИНТЕРФЕЙС СВЯЗИ ШИНА ДАННЫХ
Протокол связи шины данных PCI (или J1850) превосходит стандарт J1850 Общества автомобильных инженеров (SAE) для мультиплексирования класса B.Скорость шины данных PCI составляет в среднем 10,4 килобит в секунду (Кбит / с).
Система мультиплексирования с программируемым интерфейсом связи (шина PCI) состоит из одного провода. Модуль управления кузовным оборудованием (BCM) действует как стык для соединения каждого модуля и разъема канала передачи данных (DLC). Каждый модуль подключен параллельно к шине данных через свой набор микросхем PCI и использует свои позиции в качестве опорной шины. Минимальная длина проводки — 20 калибра.
Различные модули обмениваются информацией через порт связи, называемый шиной PCI.Модуль управления трансмиссией (PCM) передает сигнал включения / выключения контрольной лампы неисправности (проверьте двигатель) и оборотов двигателя по шине PCI. PCM получает входные данные выбора кондиционера и положения коробки передач по шине PCI. PCM также получает сигнал температуры испарителя кондиционера от шины PCI.
Следующие компоненты получают доступ или отправляют информацию по шине PCI.
Панель приборов
Модуль управления кузовом
Модуль диагностики системы подушек безопасности
Полная дисплейная головка ATC (если есть)
Модуль АБС
Модуль управления коробкой передач
Модуль управления трансмиссией
Туристический модуль
SKIM
ШИНА ДАННЫХ СЕТИ КОНТРОЛЛЕРА
Протокол связи, используемый для шины данных CAN, является открытым стандартом, заимствованным из спецификации Bosch CAN 2.0 б. CAN является более быстрой из двух основных шин в системе гибридных шин, при этом шина CAN-C обеспечивает связь почти в реальном времени (500 Кбит / с).
Узлы шины CAN подключаются параллельно двухпроводной шине с помощью витой пары, где провода наматываются друг на друга, чтобы обеспечить защиту от нежелательной электромагнитной индукции, таким образом предотвращая помехи для сигналов относительно низкого напряжения, передаваемых через них. . Витые пары имеют от 33 до 50 витков на метр.Пока шина CAN работает (активна), один из проводов шины будет иметь более высокое напряжение и называется проводом CAN High или CAN bus (+), в то время как другой провод шины будет нести более низкое напряжение и называется как провод CAN Low или CAN bus (-). См. Таблицу напряжений шины CAN.
Чтобы свести к минимуму потенциальные эффекты отключения зажигания (IOD), сеть CAN-B использует стратегию сна. Однако стратегию ожидания сети не следует путать со стратегией ожидания отдельных узлов в этой сети, поскольку они могут различаться.Например: сеть шины CAN-C активна только тогда, когда ключ зажигания находится в положении «Вкл» или «Пуск»; однако модуль TIPM, подключенный к шине CAN-C, может по-прежнему находиться в активном состоянии, если переключатель зажигания находится в положении «Аксессуар» или «Разблокировано». Интегральная схема отдельного узла может быть способна обрабатывать определенные входные и выходные данные датчиков без необходимости использования сетевых ресурсов.
Сеть шины CAN-B остается активной, пока все узлы в этой сети не будут готовы к переходу в спящий режим. Это определяется сетью, использующей токены, аналогично опросу.Когда последний активный в сети узел готов к спящему режиму и уже получил токен, указывающий, что все остальные узлы на шине готовы к спящему режиму, он передает сообщение «подтверждение спящего режима шины», которое переводит сеть в спящий режим. . Когда сеть шины CAN-B спит, любой узел на шине может разбудить ее, передав сообщение по сети. Модуль TIPM будет активировать шину CAN-B или CAN-C в течение заданного интервала времени после получения диагностического сообщения для этой шины по диагностической шине CAN-C.
В системе CAN доступные опции настраиваются в TIPM на сборочном заводе, но дополнительные опции могут быть добавлены в полевых условиях с помощью диагностического сканирующего прибора. Настройки конфигурации хранятся в энергонезависимой памяти. TIPM также имеет два 64-битных регистра, которые отслеживают каждый из узлов «как построено» и «в настоящее время отвечает» на шинах CAN-B и CAN-C. TIPM сохраняет диагностический код неисправности (DTC) в одном из двух кешей для любых обнаруженных активных или сохраненных неисправностей в том порядке, в котором они возникают.В одном кэше хранятся коды DTC трансмиссии (P-код), шасси (C-код) и тела (B-код), а во втором кэше хранятся коды DTC сети (U-код).
При наличии периодических или активных неисправностей в сети CAN диагностический диагностический прибор, подключенный к диагностической шине CAN-C через 16-контактный разъем канала передачи данных (DLC), может связываться только с TIPM. Чтобы помочь в диагностике сети CAN, TIPM будет предоставлять информацию о состоянии сети CAN-B и CAN-C на диагностический прибор, используя определенные диагностические сигналы.Кроме того, приемопередатчик в каждом узле на шине CAN-C определит «аппаратный сбой шины отключен», а приемопередатчик в каждом узле на шине CAN-B определит «общий отказ оборудования шины». Приемопередатчики для некоторых узлов CAN-B также будут определять определенные отказы для обоих сигнальных проводов шины CAN-B.
.CAN шина и OBD-II
Что такое CAN-шина? Официально CAN — это сеть контроллеров, которая представляет собой сеть независимых контроллеров, обеспечивающих безопасную связь. Впервые он был разработан Bosch и Intel в 1990 году, и с тех пор в него были внесены изменения. Международная организация по стандартизации (ISO) дала дальнейшее определение CAN, используя свою модель OSI.
Open System Interconnect или OSI — это стандартная модель архитектуры связи, состоящая из 7 уровней
CAN-шина определена в ISO 11898, но он охватывает только два нижних уровня.Другие стандарты, такие как CAN Open и SAE J1939, являются расширениями стандарта CAN, которые определяют уровни высокого уровня, но для работы с этими протоколами требуется специальное (дорогое) программное обеспечение.
На физическом уровне CAN состоит из двух выделенных проводов для связи. Эти провода называются CAN high и CAN low. Когда шина CAN находится в режиме ожидания, по обеим этим линиям передается 2,5 В, но когда передаются биты данных, линия высокого уровня CAN достигает 3,75 В, а низкий уровень CAN падает до 1,25 В. Это генерирует 2.Разность напряжений 5 В между двумя линиями, поэтому шина CAN НЕ чувствительна к индуктивным выбросам, электрическим полям или другим помехам. Это делает шину CAN очень устойчивой в электрически зашумленной среде, например в автомобиле. Использование витых пар делает его еще более надежным. Линии должны быть завершены на каждом конце резистором 120R.
Питание может подаваться по проводам шины CAN, либо питание модулей шины CAN может быть организовано отдельно. Проводка источника питания может быть либо полностью отделена от линий шины CAN (с использованием проводки подходящего калибра для каждого модуля), в результате чего для сети используются два 2-проводных кабеля, либо она может быть интегрирована в тот же кабель, что и линии шины CAN. выдача одиночного 4-х проводного кабеля.
Уровень звена данных позволяет всем модулям передавать и принимать данные по шине, т. Е. Без мастера. Каждому модулю дается уникальный идентификатор CAN, 11-битный (CAN 2.0 A) или 29-битный (CAN 2.0 B), который он использует, когда он отправляет сообщения и на которые он отвечает. Все модули также ответят на широковещательное сообщение. Максимальная пропускная способность данных, определенная стандартом, составляет 1 Мбит / с, а обычные скорости составляют 125 Кбит / с для Can Open и 250 Кбит / с для J1939.
Расстояния связи также зависят от скорости передачи данных.1 Мбит / с имеет максимальное расстояние до 40 метров, 250 Кбит / с до 250 метров и 10 Кбит / с до 1 км.
СвязьCAN основывается на кадрах, формат которых определен стандартом. Кадр может быть кадром данных, кадром ошибки или несколькими другими типами и включает в себя стартовые и стоповые биты, идентификатор или адрес CAN, данные, контрольные биты и тип кадра.
CANUSB — это USB-интерфейс CAN-шины, который поддерживает как CAN 2.0A, так и CAN 2.0B (11- и 29-битные идентификаторы), но не поддерживает CANOpen или J1939, хотя доступен условно-бесплатный проект CANOpen.Он идеально подходит для подключения CAN-шины к USB-порту ПК для диагностики, управления и контроля. CAN232 — это продукт, обеспечивающий интерфейс RS232 с шиной CAN.
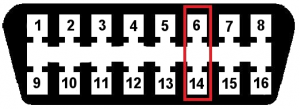
Наконец, чтобы прояснить некоторую путаницу, шина CAN — это не то же самое, что OBD или OBD2 для автомобилей. OBD2 фактически определяет 16-битный разъем, который должен быть установлен на всех новых автомобилях рядом с рулевым колесом. Различные контакты этого разъема определены для разных протоколов связи, используемых разными производителями.
| Штифт | Сигнал | Описание |
| 2 | J1850 Автобус + | |
| 4 | CGND | ЗЕМЛЯ |
| 5 | SGND | ЗЕМЛЯ |
| 6 | ISO 15765 CAN высокий | J-2284 |
| 7 | ISO 9141-2 K-LINE | Tx / Rx |
| 10 | J1850 Автобус- | |
| 14 | ISO 15765 CAN Низкий | J-2284 |
| 15 | ISO 9141-2 L-LINE | Tx / Rx |
| 16 | + 12в | Питание от аккумулятора |
В разъеме OBD-II определены 5 различных протоколов, в том числе J1850 PWM, используемый Ford, J1850 VPW, используемый General Motors, ISO 9141-2 для Chryler, ISO14230 KWP2000 на некоторых автомобилях ЕС и Азии, и самое главное. с нашей точки зрения, ISO 15765, CAN для транспортных средств.С 2008 года все новые автомобили должны поддерживать CAN, поэтому другие протоколы со временем вымрут.
CANUSB можно использовать для считывания сигналов CAN от транспортного средства, подключив CAN_L, CAN_H и CAN GND к правильным контактам на разъеме OBD-II, но без программного обеспечения для интерпретации сообщений они были бы бессмысленными. Итак, если вы хотите допросить свой автомобиль, приобретите сканер OBD-II или диагностический прибор, который использует коды PID, определенные SAE J1979.
CANUSB — интерфейс USB к CAN-шине.
CAN232 — интерфейс RS232 к шине CAN.
.Взлом вашего автомобиля с помощью Arduino и модуля CAN BUS
В вашей машине полно электронных устройств. Фактически, General Motors является одним из крупнейших производителей компьютеров из-за потребности в микрокомпьютерах в автомобилях, которые она производит. Если вас интересует, что происходит с электроникой вашего автомобиля, вы можете потратить некоторое время на взлом своего автомобиля с помощью Arduino и модуля CAN BUS.
Цитата из статьи Википедии CAN BUS:
‘Контроллерная сеть ( CAN-шина ) — это стандарт автомобильной шины, предназначенный для того, чтобы микроконтроллеры и устройства могли взаимодействовать друг с другом в приложениях без главного компьютера.Это протокол на основе сообщений, первоначально разработанный для мультиплексной электропроводки в автомобилях, но также используется во многих других контекстах ».
Современный автомобиль имеет множество ЭБУ (или электронных блоков управления). Эти «компьютеры» отправляют и получают информацию по CAN-шине автомобиля. Расшифровка этой информации может дать вам обширную информацию о работе вашего автомобиля.
К CAN-шине вашего автомобиля можно получить доступ через разъем OBD II. Я писал об OBD II и диагностике автомобильных проблем в более раннем посте здесь.Если вам интересно, есть ли в вашем автомобиле порт OBD II, вероятно, он есть. Все автомобили и легкие грузовики, построенные и проданные в Соединенных Штатах после 1 января 1996 года, должны были быть оборудованы системой OBD II.
Разъем OBD II выглядит так:
| PIN | ОПИСАНИЕ | PIN | ОПИСАНИЕ |
|---|---|---|---|
| 1 | Опция поставщика | 9 | Вариант поставщика |
| 2 | J1850 Автобус + | 10 | J1850 Автобус |
| 3 | Вариант поставщика | 11 | Опция поставщика |
| 4 | Шасси наземное | 12 | Опция поставщика |
| 5 | Сигнальная земля | 13 | Опция поставщика |
| 6 | CAN (J-2234) Высокая | 14 | CAN (J-2234) Низкий |
| 7 | ISO 9141-2 K-Line | 15 | ISO 9141-2 Низкий |
| 8 | Вариант поставщика | 16 | Питание от аккумулятора |
Примечание. Контакты 6 и 14 предназначены специально для шины CAN.
Модуль CAN BUS, который я использую, выглядит так:
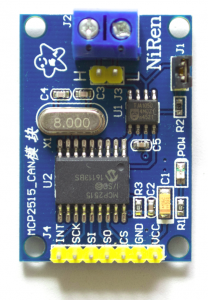
Модуль имеет семиконтактный разъем для подключения к Arduino. Два контакта используются для + 5V (питание) и GND. Остальные пять (MISO, MOSI, CS, SCK, INT) предназначены для интерфейса SPI. Разъем J1 — это перемычка для оконечной нагрузки шины 120 Ом. (У меня эта перемычка подключена к обоим модулям в моей тестовой среде, показанной ниже.) Шина CAN подключается к модулю либо с помощью винтовых клемм, либо с помощью двухконтактного разъема за винтовыми клеммами.Обратите внимание, что один из них обозначен буквой H для High, а другой — L для Low.
Прежде чем взламывать свою машину с помощью Arduino и модуля CAN BUS, возможно, вы захотите сделать то, что сделал я. Я использовал два модуля, соединенных вместе, чтобы сформировать двухузловую тестовую сеть CAN BUS. Эта установка выглядела так:
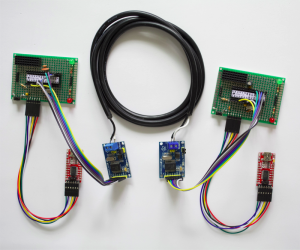
В основном, двойной провод соединяет соединения CAN BUS High / Low на модуле, который подключен (интерфейс SPI) к Arduino. Каждый DIY Arduino имеет FTDI USB для последовательного подключения к ноутбуку / телефону / компьютеру.Эта настройка позволяет убедиться, что модули работают правильно, и понять, как работает CAN BUS.
Вот как Arduino подключается к модулю CAN BUS:

Получите код Fritzing для этой диаграммы ЗДЕСЬ.
Есть несколько библиотек для Arduino для взаимодействия с модулями CAN BUS. Я использовал тот, который отсюда. Когда вы подключаете свой модуль к CAN-шине, вам нужно знать его скорость и соответственно установить это значение в скетче.Также необходимо указать скорость кристалла, которую использует ваш модуль (у меня 8 МГц). Убедитесь, что выбранная вами библиотека (если вы не используете ту, с которой я связан) поддерживает вашу скорость кристалла.
Для моей тестовой сети CAN BUS с двумя модулями я загрузил скетч примера отправки в одну Arduino, а скетч примера получения — в другую Arduino. Я установил скорость кристалла на 8 МГц (MCP_8MHZ) и скорость на 500 Кбит / с (CAN_500 Кбит / с) в каждом скетче. Скетч отправки отправляет сообщение каждые 100 мс, которое затем распечатывается на последовательной консоли.
После того, как модули заработали, можно подключить один из модулей к CAN-шине вашего автомобиля. Единственное возможное изменение, которое необходимо будет сделать в скетче приема Arduino, — это скорость CAN BUS. Он должен соответствовать скорости CAN BUS для вашего конкретного автомобиля. Мы надеемся, что немного погуглите, и вы получите больше информации по этому поводу.
Взлом вашего автомобиля с помощью Arduino и модуля CAN-шины отправит много данных. «Самое интересное» — это просеивать его, чтобы выяснить, какие электронные компоненты что посылают.Опять же, в этом отношении GOOGLE — ваш друг! 🙂
.