Как работает радар «СТРЕЛКА»
Не так давно на помощь дорожной полиции в России пришел весьма точный и незаметный для большинства устройств радар «Стрелка». Этот комплекс был заимствован из авиационных технологий и позволяет сотрудникам ГИБДД автоматически определять и фиксировать нарушения правил дорожного движения. До недавнего времени ни один известный антирадар/радар-детектор/ не мог определить данное устройство.
Сегодня выбор технологий, которые способны видеть «Стрелку» на расстоянии порядка 1.5-2 километров, весьма широк. В предложении продавцов есть как дорогие универсальные предложения, так и специализированный антирадар/радар-детектор/ против «Стрелки».
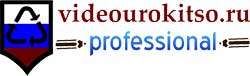
«СТРЕЛКА СТ 01» — это стационарный автоматизированный комплекс контроля дорожного движения, который принципиально отличается от всех других, разработанных отечественными и зарубежными производителями тем, что осуществляет измерение скорости не одного, а всех транспортных средств, попавших в зону действия радара.
Это исключает ошибки определения скорости транспортных средств при их движении на одной дальности на разных полосах дороги. Кроме того, он измеряет скорости не в одной точке, а на дистанциях до 350 метров.
Одновременное обслуживание до 3-4 полос движения делает комплекс Стрелка-СТ, по сравнению с другими, экономически более эффективным.
Комплекс выполняется в двух вариантах:
· стационарном («Стрелка-СТ»)
· мобильном («Стрелка-М»).
С появлением «Стрелок» на дорогах России львиная доля общей массы автомобильных радар-детекторов стала абсолютно бесполезной, они просто молчали при проезде Стрелок, никак на них не реагируя. Только в 2012 году на рынке стали появляться новинки, которые на данный момент показывают революционные характеристики детектирования радара СТРЕЛКА-СТ.
Относительно недавно началась массовая установка комплексов, которые фиксируют правонарушения без наличия радарной установки за счет фото и видео фиксации.
Например, ВИДЕОБЛОК СТРЕЛКА-СТ с процессором и ПО, устанавливаемый отдельно «без радарной части» служит для контроля одностороннего движения и проезд грузового транспорта, проезда на запрещающий сигнал светофора, нарушение разметки, включая выезд на встречку и выделенную полосу, предназначенную для движения общественного транспорта, за пропуск пешеходов и другие нарушения, штрафы за которые в последнее время очень сильно выросли.
Радар-детектор очень быстро окупит свою стоимость и прослужит Вам долгие годы, защищая Ваш кошелек от непредвиденных затрат.
| A.
Охота на Стрелку. Трактат. Какое-то время назад, на дорогах РФ, случилось пренеприятнейшее событие – появились ферменные конструкции, на которых оказались
размещены странные устройства. Вернее, поначалу это событие казалось ни чем не выдающимся, при подъезде к части этих «Стрелок» , б.м. приличные антирадары, на очень
приличном расстоянии выдавали четкое предупреждение. И водители, обладавшие подобными антирадарами заблаговременно снижали скорость
и не испытывали никаких проблем.
А тем водителям, у которых антирадаров не было, начали приходить по почте «письма счастья» требующие уплатить штраф за нарушение
скоростного режима.
Если же приличные антирадары, при подъезде к «Стрелкам» молчали, то «письма счастья» о нарушении скоростного режима в этом месте
никому не приходили. Т.е. видимо данные «Стрелки» были просто выключены. Ну появились у гаишников очередные спидганы, ну и что с того? Тем более что они были очень легкими для обнаружения, и к тому же стационарными.  Но затем начали происходить очень неприятные и странные изменения. Постепенно, одна за другой, «Стрелки» начали переставать обнаруживаться почти всеми типами антирадаров. Включая даже самые лучшие, вроде V1. И «письма счастья» начали приходить всем. Возникла определенная паника, и одновременно с этим, в сети появились некие люди, которые начали распространять «техническую информацию» об устройстве этих «Стрелок». Для ознакомления с подробностями они почти всегда приводили ссылку на сайт их разработчика. Опуская ненужные детали, главное в этой «технической информации» было следующим: 3. На расстоянии 50 м. от «Стрелки» каждую из этих машин надежно видеофиксируют, при этом совершенно не важны световые и погодные условия.  4. Радар «Стрелки» излучает «наноимпульсы» (с суперкороткой длительностью импульса, и большой скважностью) , и поэтому ни один антирадар «Стрелку» обнаружить не может и не сможет. Поскольку любой из них всегда будет воспринимать излучаемое «Стрелкой» как помеху. На сайте разработчика, помимо этой самой «информации», было размещено описание «Стрелок». Очень толково и наукообразно
написанное, и на человека далекого от радиолокации, оно несомненно должно произвести очень убедительное впечатление. Через какое-то время в сети начала появляться другая «техническая информация», уже от якобы заказчиков «Стрелок»,
различных сертифицирующих и проверяющих органов. Эта информация тоже была очень убедительно оформлена, и в общем и целом,
размещенным в интернет данным разработчика «Стрелок» противоречила почти полностью. Но на это уже ни кто не обращал внимания. Часть 2. Сказка. В этой части я попробую предположить как ситуция со «Стрелками» все же выглядит на самом деле. Для той части читающих, которые
от радиолокации далеки. И так, предположим, что в радиолокации мы не понимаем ничего, но хотим понять что к чему с этой самой «Стрелкой», и поэтому будем руководствоваться обыкновенным здравым смыслом и логикой. И для этого разберем пару наиболее вопиющих пресловутых «технических характеристик» «Стрелки-СТ»: 1. Дальность обнаружения – от 500 м.  Особенно при наличии возможности установить их так, чтобы использовать в полной мере. Особенно при наличии возможности установить их так, чтобы использовать в полной мере.И рассуждая подобным образом дальше, можно весьма уверенно предположить уже реальную практическую дальность замера скорости «Стрелками». Которая видимо составляет примерно 100-150, стандартные для всех остальных современных гаишных спидганов. 2. «Наноимпульсы», которые не может обнаружить любой антирадар. Часть 3. Проза. Как бороться со «Стрелкой». Видимо то, ради чего большинство начало читать эту статью. 😉 1. 2. Если мы понимаем что до условного рубежа в 150 м. скорость нам сбросить не удастся, продолжаем снижать скорость и останавливаемся на обочине, не доезжая ~60-70 метров до места установки «Стрелки». И затем стоим 30 секунд. После чего продолжаем движение. Можно наверное стоять и меньше, но по крайней мере 30 секунд совершенно точно достаточно. (***) 3. Для сильных духом умелых водителей, не желающих терять время, и при наличии рядом крупной фуры. Начало такое же, как в п.2.,
но вместо остановки, не доезжая 70 (и более) метров до места установки «Стрелки», ныряем за фуру и максимально прижимаемся к ней сзади.
«Стрелка», просто исходя из геометрических особенностей ее установки, сможет снять только крышу нашего авто. Часть 4. Лирика. Про охоту. Почему это статья названа именно так? Цель – эффективное практическое противодействие. Начиная с того, что эти результаты можно заслать тому же Майку Велентайну. |
 Любопытствующие достаточно быстро сумели выяснить, что эти устройства называются — «комплекс
контроля дорожного движения автоматизированный стационарный (ККДДАС-01СТ ) «Стрелка-СТ».
Любопытствующие достаточно быстро сумели выяснить, что эти устройства называются — «комплекс
контроля дорожного движения автоматизированный стационарный (ККДДАС-01СТ ) «Стрелка-СТ».

 Но зато,
если внимательно посмотреть на их уникальные особенности, можно вполне достоверно понять что же это за «наноимульсы» такие.
А именно, уникальной отличительной особенностью обоих типов антирадаров являются сильно расширенные рабочие диапазоны.
Причем как X, так и K. Благодаря этому симиконовские антирадары очень когда-то помогали при встрече с гаишными «перекрученными»
радарами в глубинке. Видимо они помогают в этой роли и сейчас.
Но зато,
если внимательно посмотреть на их уникальные особенности, можно вполне достоверно понять что же это за «наноимульсы» такие.
А именно, уникальной отличительной особенностью обоих типов антирадаров являются сильно расширенные рабочие диапазоны.
Причем как X, так и K. Благодаря этому симиконовские антирадары очень когда-то помогали при встрече с гаишными «перекрученными»
радарами в глубинке. Видимо они помогают в этой роли и сейчас. Видимо они после установки поработали в разрешенном для
подобных устройств диапазоне. А затем, после тестирования и отладки, их банально перекрутили.
Видимо они после установки поработали в разрешенном для
подобных устройств диапазоне. А затем, после тестирования и отладки, их банально перекрутили. Если мы заблаговременно обнаружили характерную ферму или штангу, на которой видны очень характерные коробки, снижаем
скорость таким образом, чтобы пересечь условный рубеж в 150 м перед «Стрелкой», двигаясь с разрешенной в данном месте скоростью.
Если мы заблаговременно обнаружили характерную ферму или штангу, на которой видны очень характерные коробки, снижаем
скорость таким образом, чтобы пересечь условный рубеж в 150 м перед «Стрелкой», двигаясь с разрешенной в данном месте скоростью. Ну или, если фура
недостаточно высокая, нашу довольную физиономию. В любом случае номер она не зафиксирует.
Ну или, если фура
недостаточно высокая, нашу довольную физиономию. В любом случае номер она не зафиксирует.
Радар «Стрелка» — описание, фото и видео
Протокол об административном нарушении, который приходит по почте и носит всем известное название – «письмо счастья», у многих вызывает ностальгию по старым добрым инспекторам, которые прячутся в кустах с радарами в руках. Все технические новшества от ГИБДД – такие, как «Стрелка», вызывают у ответственных водителей положительные эмоции, а у тех, кто любит лихо погонять, не придерживаясь ПДД, – чувство разочарования и раздражения. Познакомимся с упомянутым новшеством поближе и узнаем, что же такое радар «Стрелка»?
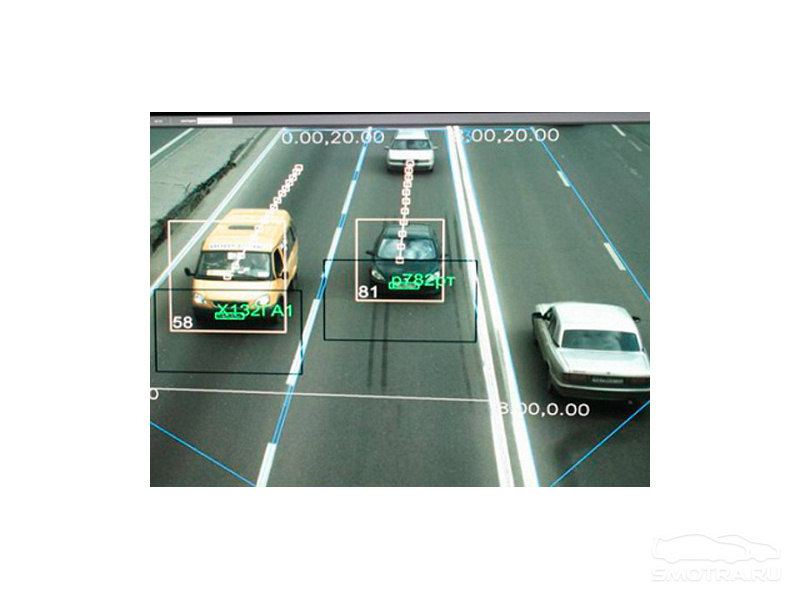
«Стрелка СТ» представляет собой прибор видеофиксации нарушений. Иными словами, это такой «контролер» правопорядка на дорогах.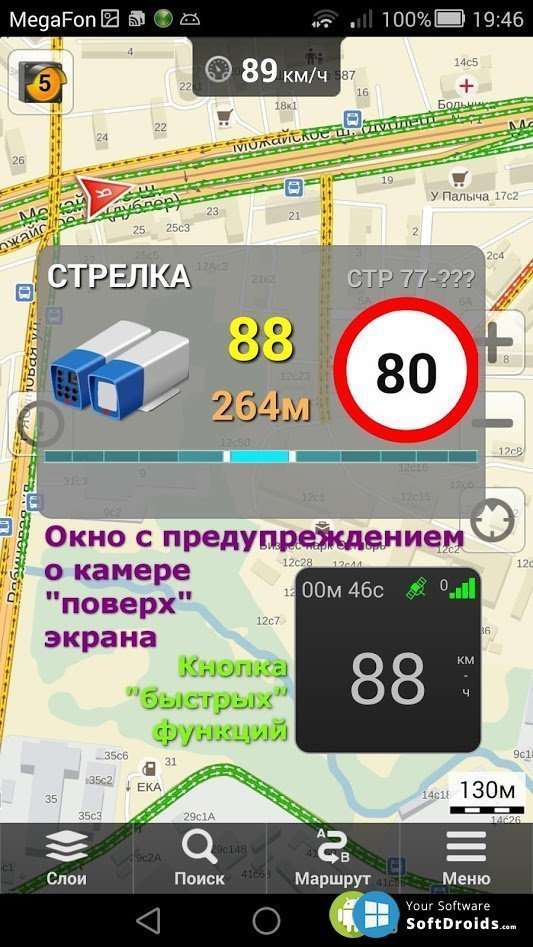 В прямоугольном корпусе «Стрелки СТ» прячется радар, сам же корпус закрывается пластиковой непрозрачной крышкой. Даже самые современные и продвинутые радар-детекторы не могут потягаться со «Стрелкой», которая начинает измерять скорость авто и осуществлять фотосъемку на расстоянии более 1 км. Дальность действия самых лучших радар-детекторов, к слову, никогда не доходит до 1 км 1 км.
В прямоугольном корпусе «Стрелки СТ» прячется радар, сам же корпус закрывается пластиковой непрозрачной крышкой. Даже самые современные и продвинутые радар-детекторы не могут потягаться со «Стрелкой», которая начинает измерять скорость авто и осуществлять фотосъемку на расстоянии более 1 км. Дальность действия самых лучших радар-детекторов, к слову, никогда не доходит до 1 км 1 км.
С помощью встроенной видеокамеры и инфракрасного прожектора, «Стрелка» может вести съемку и в ночное время, и при неблагоприятных погодных условиях, поэтому это действительно хороший «охранник» спокойствия участников дорожного движения.
«Стрелка» способна контролировать скорость автомобилей встречного и попутного направления одновременно на 4-х полосах движения. Если было фиксируется нарушение, нарушитель (его машина) повторно фиксируется камерой уже более крупным планом — на расстоянии около 50 метров.
В общем, что такое «Стрелка», должны знать все, особенно те автовладельцы, которые не хотят иметь какие-либо проблемы с ГИБДД. Тем более что данный комплекс сегодня стали все чаще использовать на просторах нашей страны в качестве профилактики нарушений ПДД и для снижения уровня аварийности на дорогах страны.
Тем более что данный комплекс сегодня стали все чаще использовать на просторах нашей страны в качестве профилактики нарушений ПДД и для снижения уровня аварийности на дорогах страны.
Видео.
Рекомендую прочитать:
Похожие публикации
Shuttle Radar Topography Mission
Почему в эту миссию были включены международные партнеры?
Освоение космоса становится международным усилием, и каждой стране выгодно сотрудничать в миссиях по изучению Земли, солнечных систем и Вселенной. В результате международного партнерства с космическими агентствами Германии и Италии к миссии была добавлена радарная система X-диапазона. Flying X-SAR добавил данные с высоким разрешением, которые иначе не удалось бы собрать.
Сколько оборотов в день совершал космический челнок?
Космический челнок совершал оборот вокруг Земли 16 раз в день. Во время 11-дневной миссии Space Shuttle Endeavour с полезной нагрузкой SRTM совершил 176 витков вокруг Земли, пролетев хвостом вперед со скоростью 7,5 км / сек (17 000 миль в час).
Во время 11-дневной миссии Space Shuttle Endeavour с полезной нагрузкой SRTM совершил 176 витков вокруг Земли, пролетев хвостом вперед со скоростью 7,5 км / сек (17 000 миль в час).
Как разработка SRTM связана с миссией на планете Земля и долгосрочными планами НАСА в отношении миссий по мониторингу окружающей среды?
Миссия Shuttle Radar Topography предоставляет важную информацию для NASA Earth Sciences Enterprise, которая занимается изучением всей системы Земли и воздействия человеческой деятельности на глобальную окружающую среду.Данные дадут ученым лучшее понимание природных систем и более надежный метод прогнозирования изменений в атмосфере, суше и море Земли, вызванных природными явлениями и антропогенная деятельность.
Топографические данные имеют решающее значение для точности этих компьютерных моделей и глобальных изменений климата, формаций суши, высоты поверхности моря и атмосферных изменений. Это потому, что форма Земли определяет потоки воздуха, воды и льда, а также пространственную структуру всего живого, включая людей. Топографические данные также дают ученым подсказки о структурах, лежащих в основе Земли, включая ее тектоническую активность.
Топографические данные также дают ученым подсказки о структурах, лежащих в основе Земли, включая ее тектоническую активность.
Данные используются в различных научных дисциплинах, от гидрологии, геологии и археологии до экологии и исследований городского развития и его воздействия на окружающую среду.
Некоторые виды использования РЛС в гражданских и коммерческих целях приносят пользу транспортной отрасли, а также рынкам коммуникационных и информационных технологий.В области телекоммуникаций поставщики услуг беспроводной связи и операторы особенно заинтересованы в этих цифровых данных о высоте. Топографические данные могут использоваться для создания лучших приемопередающих станций, определяющих лучшие географические местоположения для сотовой связи. телефонные башни и лучшие данные о местности для планирования и строительства. Фактически, от этой миссии выиграет практически любая отрасль, где требуются точные цифровые данные о высоте и топографии.
Не могли бы вы описать некоторые полевые работы, проделанные для поддержки этих орбитальных наблюдений? Сколько ученых было задействовано в полевых работах? Какими видами деятельности они занимались?
Геодезические изыскания были основным видом полевых работ. Ученые использовали метод, называемый кинематической съемкой глобальной системы позиционирования. Этот метод облегчает очень быстрые длинные линии точных позиций с движущегося транспортного средства. Фактические изыскательские работы проводились несколькими организациями, включая частных подрядчиков, геодезистов NGA и ученых JPL. Всего в поддержку этой миссии было собрано около 70 000 километров геодезических линий. Данные использовались для моделирования источников длинноволновых ошибок в данных.
Ученые использовали метод, называемый кинематической съемкой глобальной системы позиционирования. Этот метод облегчает очень быстрые длинные линии точных позиций с движущегося транспортного средства. Фактические изыскательские работы проводились несколькими организациями, включая частных подрядчиков, геодезистов NGA и ученых JPL. Всего в поддержку этой миссии было собрано около 70 000 километров геодезических линий. Данные использовались для моделирования источников длинноволновых ошибок в данных.
Кроме того, JPL установила угловые отражатели во время миссии.Это сильно отражающие структуры, которые выглядят как яркая точка на радиолокационном изображении. Эти отражатели, развернутые с точно измеренными координатами, служили контрольными точками в данных миссии Shuttle Radar Topography.
Почему бы не использовать коммерческие спутники для сбора данных?
Оптическим спутникам не удается получить два четких изображения многих мест из-за облачности и темноты. Действующие в настоящее время радиолокационные спутники не предназначены для сбора данных такого типа.Важная информация, такая как их точное местонахождение, недоступна. Для решения некоторых проблем можно использовать наземные контрольные точки, но
SRTM не требовал наземного управления, что было преимуществом в труднодоступных регионах. Использование новой технологии однопроходной радиолокационной интерферометрии было экспериментальным и сопряжено с определенным риском, поскольку в нем проверялись технологии, никогда ранее не использовавшиеся для измерения положения мачты и шаттла. Но часть устава НАСА — экспериментировать и тестировать технологии полета в космосе для будущего использования на
коммерческие спутники или переход в коммерческий сектор.
Действующие в настоящее время радиолокационные спутники не предназначены для сбора данных такого типа.Важная информация, такая как их точное местонахождение, недоступна. Для решения некоторых проблем можно использовать наземные контрольные точки, но
SRTM не требовал наземного управления, что было преимуществом в труднодоступных регионах. Использование новой технологии однопроходной радиолокационной интерферометрии было экспериментальным и сопряжено с определенным риском, поскольку в нем проверялись технологии, никогда ранее не использовавшиеся для измерения положения мачты и шаттла. Но часть устава НАСА — экспериментировать и тестировать технологии полета в космосе для будущего использования на
коммерческие спутники или переход в коммерческий сектор.
Чем эта миссия отличалась от космической радиолокационной лаборатории, которая выполнялась в 1994 году? Что нового в SRTM?
Сердцем радара SRTM был радар SIR-C / X-SAR, который дважды летал на космическом шаттле в 1994 году. Было внесено несколько модификаций, которые дали системе SRTM новые возможности по сравнению с SIR-C / X-SAR. Основными изменениями стали добавление антенн C-диапазона и X-диапазона на конце 60-метровой (200-футовой) мачты. Эти вторичные, или «внешние» антенны, позволяли радару использовать метод, называемый интерферометрией, для картирования высоты местности за один проход, что было невозможно с SIR-C / X-SAR.Интерферометрию можно сравнить с человеком, который бросает два камешка в лужу с водой и наблюдает, как рябь или концентрические круги воды, исходящие от брызг, встречаются и сталкиваются друг с другом. Эти интерференционные картины, вызванные рябью воды от двух камешков, измеряются радиолокационными системами на борту шаттла для получения топографических данных. Основная антенна на шаттле и внешняя антенна на конце мачты отражали радиолокационные сигналы от Земли одновременно, а затем извлекали «обратно-рассеянные» радиолокационные данные, поскольку сигналы от обеих антенн рассеялись и начали мешать друг другу.
Было внесено несколько модификаций, которые дали системе SRTM новые возможности по сравнению с SIR-C / X-SAR. Основными изменениями стали добавление антенн C-диапазона и X-диапазона на конце 60-метровой (200-футовой) мачты. Эти вторичные, или «внешние» антенны, позволяли радару использовать метод, называемый интерферометрией, для картирования высоты местности за один проход, что было невозможно с SIR-C / X-SAR.Интерферометрию можно сравнить с человеком, который бросает два камешка в лужу с водой и наблюдает, как рябь или концентрические круги воды, исходящие от брызг, встречаются и сталкиваются друг с другом. Эти интерференционные картины, вызванные рябью воды от двух камешков, измеряются радиолокационными системами на борту шаттла для получения топографических данных. Основная антенна на шаттле и внешняя антенна на конце мачты отражали радиолокационные сигналы от Земли одновременно, а затем извлекали «обратно-рассеянные» радиолокационные данные, поскольку сигналы от обеих антенн рассеялись и начали мешать друг другу.
Дизайн миссии SRTM также отличался от SIR-C / X-SAR. Вместо того, чтобы сосредотачиваться на ограниченном количестве «суперсайтовых» целей для повторного просмотра, как это было сделано с SIR-C / X-SAR, SRTM был разработан для картирования как можно большей площади поверхности суши. SRTM покрыл всю поверхность суши между 60 градусами северной широты и 56 градусами южной широты. SIR-C / X-SAR покрыл менее 30 процентов площади суши Земли.
Все о чем говорят
Интерферометрия и метрология (наука о мерах и весах) на SRTM звучат великолепно.Какие еще есть приложения?
Методы интерферометрии и метрологии используются в самых разных областях промышленности и науки. Некоторые особенно полезные применения интерферометрии с длинной базой в космических науках включают использование радио и лазерной интерферометрии с очень длинной базой для изучения черных дыр и других объектов, представляющих астрофизический интерес. Некоторые космические примеры этого включают
ЛИЗА.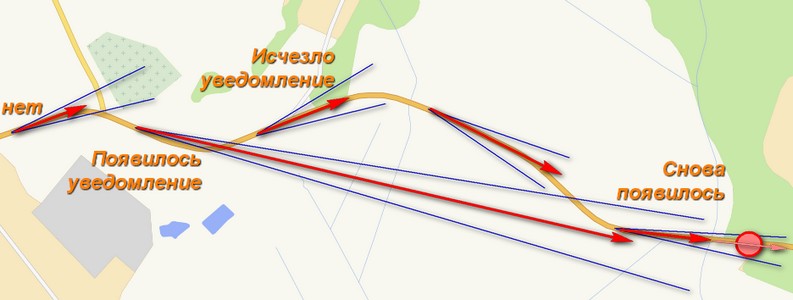 И если цель SRTM по картированию большей части Земли не достаточно амбициозна, в ближайшее время предстоит много проектов JPL.
Оптическая и инфракрасная интерферометрия.В
конечная цель
И если цель SRTM по картированию большей части Земли не достаточно амбициозна, в ближайшее время предстоит много проектов JPL.
Оптическая и инфракрасная интерферометрия.В
конечная цель
Advanced Radio and Radar Part 7 Типы радаров. Введение Мы уже рассмотрели общий принцип работы обеих радиосвязи.
Презентация на тему: «Усовершенствованные виды радиолокационных станций. Часть 7. Введение. Мы уже рассмотрели общий принцип работы обеих радиосвязи». — Стенограмма презентации:
1 Advanced Radio and Radar Part 7 Типы радаров
2
Введение Мы уже рассмотрели общий принцип работы как радиосвязи, так и радара.Теперь мы более внимательно рассмотрим различные типы оборудования, используемого в RAF, чтобы увидеть, как и где оно используется.
3 Радиолокатор точного захода на посадку (PAR) Назначение PAR — составить график приближения воздушного судна и позволить органу УВД дать точное указание для обеспечения безопасной посадки. Систему можно использовать в плохих погодных условиях (например, низкая облачность, ограниченная видимость), что сокращает перерывы в полетной программе станции.
4 PAR состоит из кабины радиолокационной станции, подключенной к ATCC. Радиолокационная головка может вращаться вокруг центральной точки, поэтому она может обслуживать любую используемую взлетно-посадочную полосу. Сама радиолокационная головка состоит из трех отдельных узлов; Кабина радара, азимутальная антенна, угловая антенна. Радар точного захода на посадку (PAR)
5
Узкие лучи передаются от каждой антенны. Один горизонтальный (ширина 2 ° и высота 0,5 °) для высоты, другой вертикальный (ширина 0,5 ° и высота 2 °) для пеленга. Радиолокатор точного захода на посадку (PAR) Пеленг по высоте Управляемый диспетчером УВД лучи блокируются, что позволяет «уловить» самолет в диаграмме направленности.
Один горизонтальный (ширина 2 ° и высота 0,5 °) для высоты, другой вертикальный (ширина 0,5 ° и высота 2 °) для пеленга. Радиолокатор точного захода на посадку (PAR) Пеленг по высоте Управляемый диспетчером УВД лучи блокируются, что позволяет «уловить» самолет в диаграмме направленности.
6 Радар точного захода на посадку (PAR) Информация о поперечном луче отображается на экране с двумя дисплеями. Один дисплей отображает сканирование по высоте, другой — азимутальное сканирование.Используя оба дисплея, диспетчер может направлять самолет по безопасной «глиссаде», чтобы приблизиться к взлетно-посадочной полосе по правильному курсу. Азимут высоты
7
Система посадки по приборам (ILS) ILS — это система наведения на взлетно-посадочную полосу для безопасной посадки без наземного диспетчера, которая предоставляет пилоту: a. Визуальную индикацию азимута самолета. (по приборам в кабине) b. Визуальная индикация высоты полета самолета.(на одном инструменте в кабине) c. Звуковая и визуальная индикация расстояния самолета от точки приземления. d. Звуковая индикация обозначения аэродрома (азбукой Морзе) для подтверждения посадки на правом аэродроме.
(по приборам в кабине) b. Визуальная индикация высоты полета самолета.(на одном инструменте в кабине) c. Звуковая и визуальная индикация расстояния самолета от точки приземления. d. Звуковая индикация обозначения аэродрома (азбукой Морзе) для подтверждения посадки на правом аэродроме.
8 Система посадки по приборам (ILS) Эта система состоит из 3 отдельных элементов: a. Передатчик локализатора. б) Передатчик направляющей. c. Внешний, средний и внутренний маркеры. ВПП LT OM MM GT IM Обеспечивает азимут для удержания воздушного судна на центральной линии подхода.Чтобы дать пилоту информацию о высоте.
9
Самолет проходит внешний маркер (5 миль) Излучаемые лучи глиссады проходят Средний маркер (¾ мили) ВПП LT OM MM GT ВПП LT OM MM GT Система посадки по приборам (ILS) Для использования ILS пилот должен расположить самолет в соответствии с приборная взлетно-посадочная полоса на расстоянии от 20 до 25 миль.
10 Система посадки по приборам (ILS) У пилота есть двухточечный счетчик.Один задает боковое направление полета (влево или вправо), другой — вертикальное (вверх или вниз). Когда два указателя пересекаются в центре, пилот показывает правильную глиссаду и курс. В приборе также есть предупреждающие флажки, которые остаются «установленными» до тех пор, пока уровень сигнала не станет достаточным для работы системы. Флаги установлены. Уровень знака низкий.
11
Установленные флаги системы посадки по приборам (ILS) Знаковая сила Низкая ВПП LT 90 Гц 150 Гц Передатчик локализатора аэродрома (LT) излучает два луча: один с частотой 90 Гц, другой с частотой 150 Гц.Если самолет отклоняется от курса влево, преобладает 90 Гц, а указатель азимута перемещается вправо. Если летательный аппарат отклоняется от курса вправо, доминирует частота 150 Гц, и указатель перемещается влево.
12 Система посадки по приборам (ILS) Над глиссадой Ниже глиссады На глиссаде Флаги убраны Знаковая сила ОК GTOM MM 90 Гц 150 Гц ВПП Передатчик глиссады излучает 2 луча, модулированных с частотой 90 Гц и 150 Гц, если самолет слишком высоко »при приближении, 90 Гц преобладает, а боковой указатель движется вниз.Если самолет «слишком низко» при приближении, преобладает частота 150 Гц, и стрелка перемещается вверх.
Статья о РЛС по The Free Dictionary
научная методика, связанная с обнаружением, опознаванием и наблюдением радиотехническими методами (радиолокационное наблюдение) различных объектов (целей), а также определением координат цели. , то есть местоположение и производные по времени этих координат и оценка других характеристик.При наличии нескольких объектов радар должен обеспечивать необходимое разрешение (раздельное наблюдение) за ними. Задачи РЛС решаются как отдельными радиолокационными комплексами, так и сложными радиолокационными системами. Радарная навигация тесно связана с радаром и использует те же методы и устройства. Радар — одно из важнейших направлений современной радиоэлектроники. Радиолокационное наблюдение использует различные принципы. Таким образом, активные (излучающие) радиолокационные системы основаны на использовании эхо-сигналов, создаваемых отражением радиоволн от объекта, который облучается радиолокационной установкой.В системах другого типа, в которых используется активный ответ, луч радара переизлучается транспондером, расположенным на объекте, положение которого определяется. В пассивных радиолокационных системах принимается собственное излучение цели. Такое излучение может исходить от электронных устройств, расположенных на цели, или это может быть собственное тепловое излучение цели.
Радарная навигация тесно связана с радаром и использует те же методы и устройства. Радар — одно из важнейших направлений современной радиоэлектроники. Радиолокационное наблюдение использует различные принципы. Таким образом, активные (излучающие) радиолокационные системы основаны на использовании эхо-сигналов, создаваемых отражением радиоволн от объекта, который облучается радиолокационной установкой.В системах другого типа, в которых используется активный ответ, луч радара переизлучается транспондером, расположенным на объекте, положение которого определяется. В пассивных радиолокационных системах принимается собственное излучение цели. Такое излучение может исходить от электронных устройств, расположенных на цели, или это может быть собственное тепловое излучение цели.
Радиолокационные системы измеряют такие величины, как расстояние до цели (определение дальности), направление, с которого приходят сигналы (определение направления), а также радиальную и угловую скорости движения цели. Радиолокационное наблюдение также может выявить многие характерные особенности конкретной цели. Например, он может измерять параметры ледяного покрова поверхности воды, влажность атмосферы или размеры и конфигурацию объекта. Данные могут быть получены либо непрерывно, либо однократно в течение определенного интервала времени. Объекты могут быть одиночными или множественными, или они могут составлять непрерывный строй. Системы отслеживания во время сканирования обеспечивают отслеживание обнаруженных целей при одновременном сканировании большого объема пространства в поисках новых целей.
Радиолокационное наблюдение также может выявить многие характерные особенности конкретной цели. Например, он может измерять параметры ледяного покрова поверхности воды, влажность атмосферы или размеры и конфигурацию объекта. Данные могут быть получены либо непрерывно, либо однократно в течение определенного интервала времени. Объекты могут быть одиночными или множественными, или они могут составлять непрерывный строй. Системы отслеживания во время сканирования обеспечивают отслеживание обнаруженных целей при одновременном сканировании большого объема пространства в поисках новых целей.
В основе самого распространенного типа радаров — активной (излучающей) системы — является явление отражения радиоволн. Простейшей характеристикой отражательных свойств цели (в направлении приемной антенны РЛС с заданным направлением поля сканирующего излучения) является поперечное сечение РЛС (ЭПР) σ. Это сечение позволяет определить плотность мощности поля P 2 на приемной антенне РЛС по плотности мощности P 1 излучения, отраженного от цели, с помощью формула
P 1 σ = P 2 · 4 πR 2
где R — расстояние от цели до радиолокационной установки. В зависимости от характера отражения или излучения радиоволн радиолокационные цели в первую очередь классифицируются как сосредоточенные, то есть дискретные цели с размерами, которые малы по сравнению с размерами разрешаемого радиолокационным комплексом объема, или распределенные. . Распределенные цели, в свою очередь, могут быть поверхностными или трехмерными. Поверхностные цели включают поверхность земли с полями, кустами и снегом, поверхность океана и поверхность Луны, а трехмерные цели включают различные неоднородности в атмосфере, такие как облака, дождь, снег и человек. сделал дипольную интерференцию.Гладкие поверхности, на которых размеры неровностей составляют небольшую часть длины волны излучения, например, спокойная водная поверхность или бетонная дорога, действуют как зеркальные отражатели; то есть между облучающей волной и отраженной волной сохраняются определенные фазовые соотношения. Когда неровности соразмерны длине волны излучения или превышают ее, возникает рассеянное отражение; то есть волны, отраженные от разных элементов поверхности, накладываются со случайными фазами.
В зависимости от характера отражения или излучения радиоволн радиолокационные цели в первую очередь классифицируются как сосредоточенные, то есть дискретные цели с размерами, которые малы по сравнению с размерами разрешаемого радиолокационным комплексом объема, или распределенные. . Распределенные цели, в свою очередь, могут быть поверхностными или трехмерными. Поверхностные цели включают поверхность земли с полями, кустами и снегом, поверхность океана и поверхность Луны, а трехмерные цели включают различные неоднородности в атмосфере, такие как облака, дождь, снег и человек. сделал дипольную интерференцию.Гладкие поверхности, на которых размеры неровностей составляют небольшую часть длины волны излучения, например, спокойная водная поверхность или бетонная дорога, действуют как зеркальные отражатели; то есть между облучающей волной и отраженной волной сохраняются определенные фазовые соотношения. Когда неровности соразмерны длине волны излучения или превышают ее, возникает рассеянное отражение; то есть волны, отраженные от разных элементов поверхности, накладываются со случайными фазами. В общем, реальные поверхности создают отражения, которые содержат как зеркальные, так и рассеянные компоненты.
В общем, реальные поверхности создают отражения, которые содержат как зеркальные, так и рассеянные компоненты.
Когда размеры одиночной цели сравниваются с длиной волны радара и объемом пространства, разрешенным радиолокационным комплексом, можно выделить три случая. В первом случае размеры мишени во много раз превышают длину волны, и в результате возникает оптическое рассеяние как на поверхности, так и на границе. Второй случай возникает, когда размеры цели не сильно отличаются от длины волны; здесь результат — резонансное рассеяние.Третий случай встречается, когда длина волны намного больше, чем размеры мишени, что приводит к рэлеевскому рассеянию. Эти случаи различаются не только интенсивностью отражения, но и характером зависимости отраженного сигнала от длины волны и поляризации сигнала сканирования.
Особый практический интерес представляет случай, когда размеры цели велики по сравнению с длиной волны. Этот случай часто встречается, потому что наиболее часто используемые длины волн радаров находятся в сантиметровом диапазоне, а большинство целей — самолеты, корабли, ракеты и космические корабли — имеют размеры поверхности и границы, которые во много раз превышают длину волны. Для этого вида рассеяния (оптического) характерно то, что RCS не зависит от поляризации сканирующего сигнала и что можно разделить большой объект на отдельные, практически независимые части. Как и в оптике, здесь большую роль играет мерцание, т. Е. Явление интенсивного отражения волн от выступов на объекте, а также зеркальное отражение от гладких участков цели. Расчет рассеяния волн на поверхности основан на применении оптических методов, в основном принципа Гюйгенса-Кирхгофа, согласно которому отраженное поле является суммированием полей от отдельных частей «освещенной» поверхности.
При резонансном рассеянии значение RCS сильно зависит от длины волны и является максимальным. Это явление используется при постановке радиолокационных помех с выбросом с самолетов соломы — металлизированных полос длиной, равной половине длины волны. При рэлеевском рассеянии RCS цели обратно пропорционален четвертой степени длины волны, прямо пропорционален квадрату объема цели и не зависит от формы цели. Такие отношения объясняют преимущества использования относительно коротких длин волн, например, в сантиметровом диапазоне, для обнаружения небольших объектов, таких как артиллерийские снаряды или капли дождя.
Такие отношения объясняют преимущества использования относительно коротких длин волн, например, в сантиметровом диапазоне, для обнаружения небольших объектов, таких как артиллерийские снаряды или капли дождя.
Разработка РЛС . Явление отражения радиоволн наблюдал Х. Герц еще в 1886–89. В 1897 г. А.С. Попов зафиксировал влияние на силу сигнала корабля, пересекающего путь радиоволн. Идея обнаружения корабля по отражению от него радиоволн была четко сформулирована в заявке на патент немецкого инженера К. Хюльсмайера в 1904 году. Его заявка также содержала подробное описание необходимого оборудования.
Интерференция непрерывных радиоволн, поступающих в приемник двумя путями — от передатчика и, после отражения, от движущегося корабля — впервые наблюдалась американскими инженерами А.Х. Тейлором и Л.К. Янгом в 1922 году. В 1932 году помеха за отражением от самолета впервые наблюдали американские инженеры Б. Тревор и П. Картер. В 1924 году британский ученый Э. Эпплтон измерил высоту слоя Кеннелли-Хевисайда, или слоя E ионосферы, наблюдая чередование усиления и ослабления сигнала, создаваемого изменением частоты колебаний передатчика, вызывая, таким образом, (как в движение отражающего объекта) изменение разности фаз между волновыми цугами, прошедшими два пути. В 1925 г. британские ученые Г. Брейт и М. Тув опубликовали результаты своей работы по определению высоты яруса Кеннелли-Хевисайда. Определение включало измерение временной задержки импульсного сигнала, отраженного от слоя, по сравнению с сигналом, приходящим с пути вдоль поверхности земли.
В 1925 г. британские ученые Г. Брейт и М. Тув опубликовали результаты своей работы по определению высоты яруса Кеннелли-Хевисайда. Определение включало измерение временной задержки импульсного сигнала, отраженного от слоя, по сравнению с сигналом, приходящим с пути вдоль поверхности земли.
В СССР работы по РЛС были расширены в 1933 году по инициативе М.М. Лобанова и под руководством Ю. К. Коровин и П. К. Ощепков. Первый введенный в практику радар, работающий на основе биений, возникающих при пересечении самолетом луча, идущего от передатчика к приемнику, был разработан под руководством Д.С. Стогов в 1938 году. Метод импульсной радиолокации был разработан в 1937 году в Ленинградском физико-техническом институте под руководством Ю. Б. Кобзарев.
Последующее развитие радара и его военного и экономического применения было связано с освоением микроволн, усовершенствованием методов радара, внедрением компьютерных технологий и использованием достижений в смежных науках. Особое значение имела разработка радиолокационной измерительной аппаратуры для зенитной и морской артиллерии. Появление и применение, почти одновременно с радаром, средств радиолокационного противодействия, таких как пассивные и активные помехи и защитные покрытия, привело к разработке новых методов радиолокации. В настоящее время радиолокационные методы используются для решения различных задач народного хозяйства в таких областях, как навигация, метеорология, аэрофотосъемка и разведка полезных ископаемых.
Появление и применение, почти одновременно с радаром, средств радиолокационного противодействия, таких как пассивные и активные помехи и защитные покрытия, привело к разработке новых методов радиолокации. В настоящее время радиолокационные методы используются для решения различных задач народного хозяйства в таких областях, как навигация, метеорология, аэрофотосъемка и разведка полезных ископаемых.
Появление космической техники в 1950-х и 1960-х годах усложнило и расширило задачи радаров. Разработка ракет и космических аппаратов потребовала точного измерения траекторий и параметров их движения для управления и прогнозирования траектории, необходимой для точной посадки космического корабля на Землю и другие планеты.Точные измерения также необходимы для сопоставления результатов научных измерений, метеорологических данных и фотографий с координатами космического корабля и для определения относительного положения космического корабля. Радар позволяет двум космическим кораблям определять местонахождение друг друга, сближаться и автоматически стыковаться. Во многих применениях радара в космическом пространстве существует тесная связь между радиолокационной системой и системами, передающими информацию, а именно радиотелеметрией, космическим телевидением и системами радиосвязи.Радиолокационная система также часто связана с системой управления и компьютерами системы управления космическим кораблем. Часто эти системы имеют общий канал связи (общие антенны и схемы в передающем и приемном устройстве), а в ряде случаев они работают с общим сигналом.
Радиолокационная астрономия — еще одна важная область применения. Принимая радиосигналы, отраженные от планет, радар может измерять расстояния до планет с большой точностью и тем самым помогать уменьшить погрешность в определении основных астрономических единиц.Он может обеспечить более точные параметры орбиты, установить (по расширению спектра отраженного радиосигнала) периоды вращения планет (в частности, Венеры) и изучить топографию поверхностей планет. С 1961 по 1963 год группа ученых СССР под руководством В. А. Котельникова проводила наблюдения Венеры, Меркурия, Марса и Юпитера.
Рисунок 1 . Радиолокационная система с увеличенным радиусом действия
С созданием систем противоракетной обороны (ПРО) радар теперь призван решать сложные проблемы, связанные с уничтожением ракет противника.Эти проблемы включают обнаружение и отслеживание вражеских ракет и наведение оборонительных ракет, запускаемых против ракет.
Основные принципы и методы радиолокации . Среди множества принципов и методов радиолокации наиболее важные связаны с дальностью действия, измерением дальности, пеленгацией, защитой от пассивных помех (метод выбора движущихся целей) и разрешением (метод бокового сканирования). ).
Дальность действия радиолокационной установки, передатчик и приемник которой расположены в одном месте и принимают отраженные сигналы в отсутствие пассивных помех, задается основным уравнением радара
, где R — рабочий диапазон, P — средняя мощность сканирующих сигналов, T — время, в течение которого цель должна быть обнаружена или расположена, S e — эффективная площадь приемной антенны, Ω — телесный угол, в пределах которого наблюдается , E p — энергия отраженного сигнала, необходимая для обнаружения цели с заданной надежностью или для определения местоположения цели с заданной точностью, а L — коэффициент потерь, возникающий из-за разницы между реальной и идеальной системами.
Это уравнение модифицируется в соответствии с конкретными условиями, в которых используется радар. Таким образом, для наземных радиолокационных установок, предназначенных для обнаружения воздушных целей на определенной высоте, мощность, излучаемая антенной, используется наиболее эффективно за счет выбора диаграммы развертки для антенны, которая обеспечит постоянство принимаемых сигналов во всем рабочем секторе независимо от расстояния. Уравнения дальности действия радара для радиолокационной установки, принимающей сигналы, ретранслируемые радиолокационным маяком, записываются отдельно для двух идентичных расстояний.Одно уравнение используется для передачи от радара к маяку; другой занимается ретрансляцией обратно на радар. Оба уравнения, которые представляют зависимость расстояния от энергетического потенциала канала, то есть от мощности передатчика и чувствительности приемника, содержат R 2 вместо R 4 .
Дальность действия РЛС на микроволновых частотах ограничена кривизной Земли и равна (в км)
, где h 1 и h 2 — соответственно высоты цель и радар, установленный над земной поверхностью (в км).Дальность действия существенно увеличивается на декаметровых (коротких) длинах волн из-за распространения и последующего отражения волн как от ионосферы (на средней высоте 300 км), так и от поверхности Земли.
Открытие в 1947 г. советским ученым Н. И. Кабановым явления дальнего рассеяния декаметровых волн от поверхности Земли и возврата этих волн к источнику передачи после отражения от ионосферы предполагало теоретическую возможность создания система, которая расширит максимальную дальность действия радара.Такая система может быть устроена двумя способами. В первом случае передатчик и приемник широко разнесены, и между ними наблюдаются цели. В другом варианте используется сканирование с косой обратной связью, при котором принятые сигналы возвращаются в то место, откуда они были излучены (рисунок 1).
Рисунок 2 . Блок-схема системы, использующей импульсный метод измерения расстояния r до цели
При измерении расстояния с помощью отраженных сигналов используются два метода.Первый, или импульсный, метод включает в себя излучение импульса и измерение временной задержки, необходимой для приема отраженного или повторно переданного импульса от цели. Измерения упрощаются, если отраженный сигнал не накладывается на сигнал сканирования, то есть если объект находится достаточно далеко от радиолокационной установки. Этот метод реализуется в простейшем случае (рисунок 2) с использованием передатчика импульсов, приемника (обычно супергетеродинного типа), синхронизатора, запускающего передатчик и обеспечивающего шкалу времени, и дисплея электронно-лучевой трубки со шкалой для измерения расстояния.Версии этой конструкции включают многомасштабные конструкции с использованием принципа верньера и системы слежения, которые автоматически измеряют расстояние.
Второй метод измерения расстояния зависит от наблюдения интерференции между двумя непрерывными волнами, сканирующим излучением и излучением, отраженным или повторно передаваемым от цели. Этот метод реализуется путем линейного изменения частоты сканирующего излучения. Смеситель, подключенный к передатчику и приемнику, смешивает прямые и эхо-сигналы.Сигналы, поступающие в смеситель, из-за их разных частот создают биения с частотой, пропорциональной измеряемому расстоянию (рис. 3, а и б). После обнаружения, усиления и ограничения сигналы передаются на частотомер, который измеряет частоту ударов и имеет шкалу, которая может быть откалибрована непосредственно в единицах измерения расстояния.
Радиальная скорость цели обычно определяется с высокой степенью точности путем измерения доплеровской частоты.Здесь должны использоваться сигналы большой продолжительности, чтобы получить точную разрешающую способность для скорости и высокую точность
Рисунок 3 . Измерение расстояния посредством непрерывных частотно-модулированных колебаний: (а) блок-схема радиолокационной системы и (б) кривые, показывающие изменение частоты сканирующего и отраженного излучения как функцию времени. Здесь f s — частота сканирующего излучения, f p — частота отраженного излучения, T M — период модуляции, 2 r / c — частота запаздывание эха ( r — расстояние до цели, c — скорость света), а t — время.
в его измерении. Однако возможность точного определения расстояния предполагает использование сигналов с большой полосой пропускания. Поэтому в радарах рекомендуется использовать сложные сигналы с большой полосой пропускания, имеющей большую базу, которая является произведением, полученным путем умножения спектральной ширины полосы пропускания на длительность. В случае простых сигналов, таких как одиночные монохроматические импульсы, расширение спектра сигнала для получения лучшего разрешения по расстоянию сопровождается ухудшением разрешения по скорости.
Направление цели может быть определено путем наблюдения из единственной стационарной точки или путем разнесенного приема. Метод пеленгации, который обычно используется в устройствах, расположенных в одной точке, заключается в том, что сравниваются амплитуды сигналов. Этот метод, известный как амплитудный метод, позволяет достичь высокой точности вместе с автоматическим отслеживанием направления и высоким отношением сигнал / шум. В простейшем случае выполняется сравнение амплитуд эхо-сигналов от цели, соответствующих двум различным положениям диаграммы развертки антенны (рисунок 4).По знаку и значению разницы между этими сигналами (сигнал ошибки) можно судить о значении и знаке разницы между направлением на цель и равносигнальным направлением (где сигнал ошибки равен нулю). После усиления сигнал ошибки подается в систему слежения, которая вращает антенну, чтобы следить за движением объекта; то есть антенна «отслеживает» равносигнальное направление.
Есть два варианта этого метода. В первом, более простом, необходимо иметь только один приемный канал, связанный с одной антенной.Посредством механической или электронной коммутации соответствующих цепей антенна принимает два положения в своей диаграмме сканирования, и вырабатывается сигнал ошибки, который управляет системой слежения. Сравниваемые сигналы генерируются последовательно. Во втором варианте, моноимпульсном методе, есть два канала приема, подключенных к двум антеннам, и первый и второй сигналы генерируются одновременно. В моноимпульсном методе отсутствуют ошибки, вызванные флуктуациями сигнала, которые неизбежны в первом варианте.
Для радиолокационных установок, работающих в сантиметровом диапазоне длин волн, первый вариант пеленгации осуществляется коническим сканированием, то есть закручиванием радиолуча, наклоненного относительно оси отражателя антенны (равносигнальное направление ). Синхронно с вращением луча формируются два ортогональных напряжения, которые используются на выходе сигнального канала при коммутации детекторов фазовой модуляции для получения сигнала ошибки. Во втором варианте одновременно существуют четыре луча и два сигнала ошибки (от каждой из ортогональных пар лучей).
Рисунок 4 . Пеленгация методом сравнения: (OB) равносигнальное направление, (OA) и (OC) две позиции максимума диаграммы сканирования
В дополнение к методу сравнения, амплитудный метод используется для анализа огибающей полученные сигналы. Этот метод может обеспечить примерно такую же точность пеленгации при одновременном сканировании узким лучом сектора, в котором может находиться несколько целей.
Использование разнесенных приемников позволяет достичь высокоточного пеленгования путем измерения разницы во времени прихода сигналов.В зависимости от формы принимаемых сигналов это измерение может быть выполнено с использованием импульсного, корреляционного и фазового методов.
Был достигнут большой прогресс в фазовом методе, который основан на измерении разности фаз высокочастотных колебаний, принимаемых антеннами, разнесенными на определенное расстояние, называемое базовой линией. Достоинством этого метода является высокая точность, которая достигается главным образом за счет увеличения по мере необходимости базовой линии. В методе отсутствуют ошибки, вызванные флуктуациями сигнала, имеющего одинаковую амплитуду в каналах фазовой системы.Когда радиочастота преобразуется в промежуточную (нижнюю) частоту в супергетеродинном приемнике, разность фаз остается неизменной, и ее измерение с точностью около 1 ° не представляет технических трудностей. При реализации этого метода важно как сохранить идентичность и стабильность фазовых характеристик отдельных приемных каналов, допускающих колебания, разность фаз которых измеряется, так и сохранить постоянными частоту принимаемых волн и базовую линию (или иначе осуществлять особый контроль за их изменением).
Рисунок 5 . Блок-схема когерентной радиолокационной системы: ( F D ) Доплеровская частота движущейся цели, ( f c ) несущая частота, ( f i ) промежуточная частота, (IFA) промежуточная частота усилитель и антенна (An)
Фазовый метод очень удобен также для точного измерения угловой скорости цели, испускающей собственное излучение. Удлиняя базовую линию, можно увеличить чувствительность системы к изменению угловых координат в большой раз, тем самым получая измеримые разности фаз даже при малейшем угловом смещении цели.Сложность измерения угловых координат и их производных с помощью этих систем обусловлена множеством каналов в конструкции, жесткими требованиями к фазовым характеристикам каналов и необходимостью использования высокопроизводительного цифрового компьютера для обработки данных. .
Развитие фазовых методов измерения угловых координат и их производных с помощью радиолокатора нашло применение в радиоастрономии, где используются интерферометры с очень длинными базами (порядка нескольких тысяч км).С помощью этих устройств может быть достигнуто угловое разрешение порядка тысячных долей дуги.
Большое значение в радарах имеет метод обнаружения движущихся целей, то есть обнаружение сигналов, отраженных от целей, когда сигналы маскируются радиоволнами, отраженными от близлежащих объектов. При наблюдении за низколетящими самолетами, снарядами или целями, движущимися по земле, эхо-сигналы могут быть замаскированы радиоволнами, отраженными от зданий, холмов и лесов.Изменчивые моря могут отражать волны и, таким образом, затруднять обнаружение субмарины
История радаров — Infogalactic: ядро планетарных знаний
Антенна передатчика Chain Home, часть одной из первых комплексных радарных систем. Немецкая модель Freya работала на более высоких частотах и, следовательно, была меньше, чем ее аналог Chain Home.История радара начинается с экспериментов Генриха Герца в конце 19 века, которые показали, что радиоволны отражаются металлическими объектами.Эта возможность была предложена в основополагающей работе Джеймса Клерка Максвелла по электромагнетизму. Однако только в начале 20-го века системы, способные использовать эти принципы, стали широко доступными, и именно немецкий изобретатель Кристиан Хюльсмайер впервые использовал их для создания простого устройства обнаружения кораблей, предназначенного для предотвращения столкновений в тумане (Reichspatent Nr. 165546). В течение следующих двух десятилетий были разработаны многочисленные подобные системы, которые предоставляли информацию о направлении к объектам на близком расстоянии.
Разработка систем, способных производить короткие импульсы радиоэнергии, была ключевым достижением, которое позволило появиться современным радиолокационным системам. Посредством синхронизации импульсов на осциллографе можно было определить дальность, а направление антенны выявить угловое положение целей. Эти два, вместе взятые, произвели «фиксацию», определяя местоположение цели относительно антенны. В период 1934–1939 годов восемь стран независимо друг от друга и в большой секретности разработали системы этого типа: Великобритания, Германия, Соединенные Штаты, СССР, Япония, Нидерланды, Франция и Италия.Кроме того, Великобритания поделилась своей информацией с Соединенными Штатами и четырьмя странами Содружества: Австралией, Канадой, Новой Зеландией и Южной Африкой, и эти страны также разработали собственные радарные системы. Во время войны к этому списку добавилась Венгрия. [1] Термин RADAR был введен в обращение в 1939 году Корпусом связи США, когда он работал над этими системами для ВМФ. [2]
Прогресс во время войны был быстрым и имел большое значение, вероятно, одним из решающих факторов победы союзников.Ключевой разработкой стал магнетрон в Великобритании, который позволил создавать относительно небольшие системы с субметровым разрешением. К концу боевых действий Великобритания, Германия, США, СССР и Япония располагали широким разнообразием радаров наземного и морского базирования, а также небольших бортовых систем. После войны использование радаров расширилось во многих областях, включая гражданскую авиацию, морскую навигацию, радары для полиции, метеорологию и даже медицину. Ключевые разработки в послевоенный период включают лампу бегущей волны как способ получения большого количества когерентных микроволн, разработку систем задержки сигнала, которые привели к появлению радаров с фазированной решеткой, и постоянно увеличивающиеся частоты, которые обеспечивают более высокое разрешение.Расширение возможностей обработки сигналов в связи с внедрением твердотельных компьютеров также оказало большое влияние на использование радаров.
Значение
Место радара в более широкой истории науки и техники рассматривается разными авторами по-разному. С одной стороны, радар очень мало способствовал развитию теории, которая была широко известна со времен Максвелла и Герца. Таким образом, радар не продвигал науку, а был просто вопросом технологии и инженерии.Морис Понте, один из разработчиков радара во Франции, утверждает:
Фундаментальный принцип радара принадлежит общему достоянию физиков: в конце концов, реальная заслуга технических специалистов измеряется эффективной реализацией эксплуатационных материалов. [3]
Но другие указывают на огромные практические последствия развития радаров. Радар внес гораздо больше, чем атомная бомба, в победу союзников во Второй мировой войне. [4] Роберт Будери [5] утверждает, что он также был предшественником многих современных технологий. Из рецензии на его книгу:
… радар стал источником множества достижений со времен войны, создав настоящую родословную современных технологий. Благодаря радару астрономы могут отображать контуры далеких планет, врачи могут видеть изображения внутренних органов, метеорологи могут измерять дождь, падающий в отдаленных местах, воздушное путешествие в сотни раз безопаснее, чем путешествие по дороге, междугородные телефонные звонки дешевле, чем почтовые расходы, компьютеры стали повсеместными, и обычные люди могут готовить свой ежедневный обед в промежутках между ситкомами с помощью того, что раньше называлось радарным диапазоном . [6]
В более поздние годы радар использовался в научных инструментах, таких как метеорологический радар и радиолокационная астрономия.
Ранние участники
Генрих Герц
В 1886–1888 годах немецкий физик Генрих Герц провел серию экспериментов, которые доказали существование электромагнитных волн (включая радиоволны), предсказанных в уравнениях, разработанных в 1862–1848 годах шотландским физиком Джеймсом Клерком Максвеллом. В эксперименте 1887 года Герц обнаружил, что эти волны будут проходить через различные типы материалов, а также отражаться от металлических поверхностей в его лаборатории, а также от проводников и диэлектриков.Природа этих волн, похожих на видимый свет по их способности отражаться, преломляться и поляризоваться, будет показана Герцем и последующими экспериментами других физиков. [7]
Гульельмо Маркони
Пионер радио Гульельмо Маркони заметил, что радиоволны отражаются обратно в передатчик объектами в своих экспериментах с радиомаяком 3 марта 1899 года, которые он проводил на равнине Солсбери. Он поделится своими открытиями 23 года спустя в статье 1922 года, представленной Институту инженеров-электриков в Лондоне:
Я также описал тесты, проведенные при передаче луча отраженных волн по стране… и указал на возможность использования такой системы в применении к маякам и плавучим маякам, чтобы позволить судам в туманную погоду обнаруживать опасные точки у побережья …
Мне [теперь] кажется, что можно разработать [] устройство, с помощью которого корабль мог бы излучать или проецировать расходящийся луч этих лучей в любом желаемом направлении, причем эти лучи, если они проходят через металлический объект, например, другой пароход или корабль, будет отражаться обратно в приемник, экранированный от местного передатчика на отправляющем судне, и, таким образом, немедленно обнаруживать присутствие и пеленг другого судна в тумане или в ненастную погоду. [8] [9] [10]
Кристиан Хюльсмайер
В 1904 году Кристиан Хюльсмайер организовал в Германии и Нидерландах публичные демонстрации использования радиоэхо для обнаружения кораблей и предотвращения столкновений. Его устройство состояло из простого искрового разрядника, который использовался для генерации сигнала, который направлялся с помощью дипольной антенны с цилиндрическим параболическим отражателем. Когда сигнал, отраженный от корабля, принимался аналогичной антенной, прикрепленной к отдельному приемнику когерера, прозвучал звонок.Во время плохой погоды или тумана устройство периодически «крутилось», чтобы проверить, нет ли поблизости кораблей. Аппарат обнаруживал присутствие кораблей на расстоянии до 3 км, и Хюльсмайер планировал расширить его возможности до 10 км. Он не предоставлял информацию о дальности (расстоянии), только предупреждение о близлежащем объекте. Он запатентовал устройство, получившее название телемобилоскоп , но из-за отсутствия интереса со стороны военно-морских властей изобретение не было запущено в производство. [11]
Hülsmeyer также получил поправку к патенту для оценки дальности до корабля.Используя вертикальное сканирование горизонта с помощью телемобилоскопа , установленного на вышке, оператор найдет угол, при котором возврат будет наиболее интенсивным, и с помощью простой триангуляции определит приблизительное расстояние. Это контрастирует с более поздним развитием импульсного радара, который определяет расстояние через время двустороннего движения.
Соединенное Королевство
В 1915 году Роберт Уотсон Уотт поступил на работу в Метеорологическое бюро в качестве метеоролога, работая на удаленной станции в Олдершоте в Хэмпшире.В течение следующих 20 лет он изучал атмосферные явления и разработал использование радиосигналов, генерируемых ударами молний, для определения местоположения гроз. Сложность определения направления этих мимолетных сигналов с помощью вращающихся направленных антенн привела в 1923 году к использованию осциллографов для отображения сигналов. Операция в конечном итоге переместилась на окраину Слау в Беркшире, и в 1927 году была создана Radio Research Station (RRS), Slough, подразделение Департамента научных и промышленных исследований (DSIR).Уотсон Уотт был назначен суперинтендантом RRS.
Когда тучи войны сгущались над Британией, вероятность воздушных налетов и угроза вторжения с воздуха и моря вызвали серьезные усилия по применению науки и технологий в обороне. В ноябре 1934 года министерство авиации создало Комитет по научным исследованиям противовоздушной обороны (CSSAD) с официальной функцией рассмотрения, «насколько последние достижения в области науки и техники могут быть использованы для усиления существующих методов защиты от вражеских самолетов».Эта группа, обычно называемая «Комитетом Тизардов» в честь его председателя сэра Генри Тизарда, оказала огромное влияние на технические разработки в Великобритании.
Х.Э. Вимперис, директор по научным исследованиям Министерства авиации и член комитета Тизард, читал о статье в немецкой газете, в которой утверждалось, что немцы построили луч смерти, используя радиосигналы, сопровождаемые изображением очень большой радиоантенны. . Обеспокоенный и потенциально взволнованный этой возможностью, но в то же время весьма скептически настроенный, Вимперис искал эксперта в области распространения радиоволн, который мог бы вынести суждение о концепции.Ватт, суперинтендант RRS, теперь стал авторитетным авторитетом в области радио, и в январе 1935 года Вимперис связался с ним и спросил, можно ли использовать радио для такого устройства. Обсудив это со своим научным ассистентом Арнольдом Ф. «Скипом» Уилкинсом, Уилкинс быстро произвел предварительный расчет, который показал, что требуемая энергия будет огромной. Ватт ответил, что это маловероятно, но добавил следующий комментарий: «Внимание обращается на все еще сложную, но менее бесперспективную проблему радиообнаружения, и при необходимости будут представлены численные соображения по методу обнаружения отраженными радиоволнами» . [12]
В течение следующих нескольких недель Уилкинс рассматривал проблему обнаружения радиоволн. Он обрисовал подход и подкрепил его подробными расчетами необходимой мощности передатчика, характеристик отражения самолета и необходимой чувствительности приемника. Он предложил использовать направленный приемник, основанный на концепции обнаружения молний Ватта, для прослушивания мощных сигналов от отдельного передатчика. Измерение времени и, следовательно, расстояния может осуществляться путем запуска осциллографа с приглушенным сигналом от передатчика, а затем просто измерения возвратных сигналов по шкале.Уотсон Уотт отправил эту информацию в министерство авиации 12 февраля 1935 года в секретном отчете под названием «Обнаружение самолетов с помощью радиометодов».
Отражение радиосигналов было критичным для предлагаемой техники, и Министерство авиации спросило, можно ли это доказать. Чтобы проверить это, Уилкинс установил приемное оборудование на поле возле Аппер-Стоу, Нортгемптоншир. 26 февраля 1935 года бомбардировщик Handley Page Heyford пролетел по дороге между приемной станцией и передающими вышками коротковолновой станции BBC в соседнем Давентри.Самолет отражал сигнал BBC с частотой 6 МГц (49 м), и это было легко обнаружено Арнольдом «Скипом» Уилкинсом с помощью доплеровской интерференции на дальностях до 8 миль (13 км). Это убедительное испытание, известное как Daventry Experiment , было засвидетельствовано представителем Министерства авиации и привело к немедленному получению разрешения на создание полноценной демонстрационной системы. Этот эксперимент был позже воспроизведен Уилкинсом в 1977 году в телесериале BBC Секретная война, эпизод «Чтобы увидеть сто миль».
На основе импульсной передачи, используемой для зондирования ионосферы, предварительная система была спроектирована и построена в RRS командой. Их существующий передатчик имел пиковую мощность около 1 кВт, и Уилкинс подсчитал, что потребуется 100 кВт. Эдвард Джордж Боуэн был добавлен к команде, чтобы спроектировать и построить такой передатчик. Передатчик Боуэнса работал на частоте 6 МГц (50 м), имел частоту следования импульсов 25 Гц, ширину импульса 25 мкс и приближался к желаемой мощности.
Орфорднесс, узкий 19-мильный (31 км) полуостров в Саффолке на побережье Северного моря, был выбран в качестве испытательного полигона.Здесь оборудование будет открыто эксплуатироваться под видом станции мониторинга ионосферы. В середине мая 1935 года оборудование было перевезено в Орфорднесс. Были возведены шесть деревянных башен: две — для крепления передающей антенны, четыре — для углов перекрестных приемных антенн. В июне начались генеральные испытания оборудования.
17 июня была обнаружена первая цель — летающая лодка Supermarine Scapa на дальности 17 миль (27 км). [13] Исторически верно, что 17 июня 1935 года радиообнаружение и дальнометрия были впервые продемонстрированы в Великобритании.Уотсону Уатту, Уилкинсу и Боуэну обычно приписывают создание того, что позже будет названо радаром в этой стране. [14]
В декабре 1935 года британское казначейство выделило 60 000 фунтов стерлингов на систему из пяти станций под названием Chain Home (CH), охватывающую подходы к устью Темзы. Секретарь комитета Tizard, Альберт Персиваль Роу, придумал аббревиатуру RDF в качестве прикрытия для работы, означающую определение дальности и направления, но предполагающую уже хорошо известную радиопеленгацию.
В конце 1935 года, отвечая на признание Линдеманном необходимости в оборудовании для ночного обнаружения и перехвата и понимая, что существующие передатчики слишком тяжелы для самолетов, Боуэн предложил установить только приемники, которые позже будут называть бистатическими радарами. [15] Предложения Фредерика Линдеманна по инфракрасным датчикам и воздушным минам оказались бы непрактичными. [16] Потребовались усилия Боуэна по настоянию Тизарда, который все больше беспокоился о необходимости увидеть радар «воздух-поверхность» (ASV) и через него бортовой перехват (AI). [17]
В 1937 году команда Боуэна установила свой примитивный радар ASV, первый в мире бортовой комплекс, для обнаружения Флота метрополии в плохую погоду. [18] Только весной 1939 года, «в срочном порядке» после отказа прожекторной системы Silhouette, [19] обратилось внимание на использование ASV для перехвата в воздухе (AI). [19] Продемонстрированный в июне 1939 года ИИ получил теплый прием со стороны начальника авиации маршала Хью Даудинга, а тем более Черчилля.Это оказалось проблематичным. [19] Его точность, зависящая от высоты самолета, означала, что CH, способный только 4 см (0,0068 км), не был достаточно точным, чтобы разместить самолет в пределах его дальности обнаружения, и требовалась дополнительная система. [20] Его деревянное шасси имело тревожную тенденцию воспламеняться (даже при внимании опытных технических специалистов), [21] настолько, что Даудинг, когда ему сказали, что Watson-Watt может предоставить сотни комплектов, потребовал «десять» эта работа». [22] Наборы Cossor и MetroVick были слишком тяжелыми для использования в самолетах. [19] И RAF не хватало пилотов ночных истребителей, наблюдателей, [23] и подходящих самолетов. [24] [ необходима страница ]
В 1940 году Джон Рэндалл и Гарри Бут разработали резонаторный магнетрон, который сделал 10-сантиметровый радар реальностью. Это устройство размером с небольшую обеденную тарелку можно было легко переносить на самолете, а короткая длина волны означала, что антенна также будет небольшой и, следовательно, пригодной для установки на самолет.Короткая длина волны и большая мощность сделали его очень эффективным для обнаружения подводных лодок с воздуха.
Чтобы помочь Chain Home в расчете высоты, по запросу Даудинга в 1940 году был представлен электрический калькулятор типа Q (обычно называемый «фруктовый автомат»). [18]
Решение для ночного перехвата будет предоставлено доктором У. Б. «Беном» Льюисом, который предложил новый, более точный наземный дисплей управления, индикатор планового положения (PPI), новый радар перехвата с наземным управлением (GCI) и надежный Радар AI. [20] Наборы AI в конечном итоге будут созданы EMI. [21] GCI, несомненно, был задержан из-за возражений Уотсона-Ватта и его веры в то, что CH было достаточно, а также из-за того, что Боуэн предпочитал использовать ASV для навигации, несмотря на то, что командование бомбардировщиков отрицало необходимость в этом, и из-за того, что Тизард полагался на неисправная система Silhouette. [25]
Министерство авиации
В марте 1936 года предприятие в Орфорднессе было перенесено в поместье Боудси, расположенное неподалеку на материке.До этого времени работа официально оставалась в рамках DSIR, но теперь была передана Министерству авиации. На новой исследовательской станции Bawdsey оборудование Chain Home (CH) было собрано в качестве прототипа. Проблемы с оборудованием возникли, когда Королевские ВВС (RAF) впервые испытали опытный образец станции в сентябре 1936 года. Они были устранены к апрелю следующего года, и министерство авиации начало планы по созданию более широкой сети станций.
Первоначальное оборудование на станциях СН было следующим: передатчик работал на четырех предварительно выбранных частотах от 20 до 55 МГц, настраиваемых в течение 15 секунд, и выдавал пиковую мощность 200 кВт.Длительность импульса регулировалась от 5 до 25 мкс, частота следования выбиралась как 25 или 50 Гц. Для синхронизации всех передатчиков CH генератор импульсов был синхронизирован с частотой 50 Гц британской электросети. Четыре стальные башни высотой 360 футов (110 м) поддерживали передающие антенны, а четыре деревянные башни высотой 240 футов (73 м) поддерживали решетку перекрестных диполей на трех разных уровнях. Гониометр использовался для повышения точности определения направления от нескольких приемных антенн.
К лету 1937 года 20 начальных станций ЦО находились в режиме отбытия.До конца года были проведены крупные учения RAF, которые имели такой успех, что Казначейство выделило 10 000 000 фунтов стерлингов для возможной полной цепочки прибрежных станций. В начале 1938 года RAF взяли под свой контроль все станции CH, и сеть начала регулярную работу.
В мае 1938 года Роу сменил Уотсона Уотта на посту суперинтенданта в Боудси. В дополнение к работе над СН и последующими системами, в настоящее время велась большая работа над бортовым оборудованием RDF. Этим руководил Э.Дж. Боуэна и центрированные на наборах 200 МГц (1,5 м). Более высокая частота позволяла использовать антенны меньшего размера, подходящие для установки на самолетах.
С самого начала работы RDF в Орфорднессе министерство авиации постоянно информировало британскую армию и королевский флот; это привело к тому, что обе эти силы разработали собственные RDF.
Британская армия
В 1931 году на Вулвичской исследовательской станции Армейского экспериментального центра сигналов (SEE) В.А.С. Бутемент и П.Э. Поллард исследовал импульсные сигналы 600 МГц (50 см) для обнаружения судов. Хотя они подготовили меморандум по этому поводу и провели предварительные эксперименты, по неопределенным причинам военное министерство не приняло его во внимание. [26]
По мере того как министерство авиации работало над RDF, полковник Питер Уорлледж из Королевского совета инженеров и связи встретился с Уотсоном Уоттом и был проинформирован об оборудовании и технологиях RDF, разрабатываемых в Орфорднессе. Его доклад «Предлагаемый метод обнаружения самолетов и его перспективы» побудил ЮВЕ создать «армейскую ячейку» в Боудси в октябре 1936 года.Это было при Э. Талботе Пэрис, и в его состав входили Бутмент и Поллард. В работе Ячейки особое внимание уделяется двум основным типам оборудования РСО: системы наводки (GL) для помощи зенитным орудиям и прожекторам и системы береговой обороны (CD) для управления береговой артиллерией и защиты армейских баз за рубежом.
Поллард руководил первым проектом — установкой артиллерийских установок RDF под кодовым названием Mobile Radio Unit (MRU). Эта смонтированная на грузовике система была разработана как уменьшенная версия станции ЦО. Он работал на частоте 23 МГц (13 м) при мощности 300 кВт.Одна 105-футовая (32 м) башня поддерживала передающую антенну, а также две приемные антенны, установленные ортогонально для оценки пеленга сигнала. В феврале 1937 года группа разработчиков обнаружила самолет на дальности 96 км. Министерство авиации также приняло эту систему как мобильное дополнение к системе CH.
В начале 1938 года компания Butement приступила к разработке системы компакт-дисков на основе эволюционирующих бортовых установок Боуэна на частоте 200 МГц (1,5 м). Передатчик имел частоту импульсов 400 Гц, ширину импульса 2 мкс и мощность 50 кВт (позже увеличенную до 150 кВт).Хотя использовались многие компоненты передатчика и приемника Боуэна, система не могла быть бортовой, поэтому не было ограничений на размер антенны.
В первую очередь за внедрение лучевых RDF-систем в Великобритании следует отдать компании Butement. Для CD он разработал большую дипольную решетку высотой 10 футов (3,0 м) и шириной 24 фута (7,3 м), дающую гораздо более узкие лучи и большее усиление. Его можно было вращать со скоростью до 1,5 оборотов в минуту. Для большей точности направления было принято переключение лепестков на приемных антеннах.В рамках этой разработки он сформулировал первое — по крайней мере в Британии — математическое соотношение, которое позже стало широко известно как «уравнение дальности действия радара».
К маю 1939 года CD RDF мог обнаруживать самолеты, летящие на высоте до 500 футов (150 м) и на дальности 25 миль (40 км). С помощью антенны на высоте 60 футов (18 м) над уровнем моря он мог определять дальность полета 2000-тонного корабля на расстоянии 24 миль (39 км) и с угловой точностью всего в четверть градуса.
Королевский флот
Хотя Королевский флот поддерживал тесный контакт с министерством авиации в Боудси, они решили организовать собственную разработку RDF в экспериментальном отделе школы сигналов Его Величества (HMSS) в Портсмуте, графство Хэмпшир, на южном побережье.
HMSS приступила к работе с RDF в сентябре 1935 года.