Модуль для работы с шиной LIN для CAN-Hacker
Модуль для работы с шиной LIN для CAN-Hacker
Дополнительный программно-аппаратный модуль для работы с шиной LIN
Устанавливается в разъемы расширения CAN-Hacker 3
Для работы с шиной LIN и адаптером LIN-K необходимо заливать поставляемую при покупке прошивку. Эта прошивка работает только с шиной LIN для дальнейшей работы с CAN-Hacker необходимо залить предыдущую прошивку. Процесс занимает 20 секунд. В дальнейшем возможности работы с шиной LIN и шиной CAN будут объединены в одну прошивку.
В комплекте:
Адаптер шины LIN, прошивка
Аппаратно адаптер реализован очень просто на базе LIN трансивера TJA2021
Пример работы:

Дополнительный программно-аппаратный модуль для работы с шиной LIN
Устанавливается в разъемы расширения CAN-Hacker 3
Для работы с шиной LIN и адаптером LIN-K необходимо заливать поставляемую при покупке прошивку. Эта прошивка работает только с шиной LIN для дальнейшей работы с CAN-Hacker необходимо залить предыдущую прошивку. Процесс занимает 20 секунд. В дальнейшем возможности работы с шиной LIN и шиной CAN будут объединены в одну прошивку.
В комплекте:
Адаптер шины LIN, прошивка
Аппаратно адаптер реализован очень просто на базе LIN трансивера TJA2021
Пример работы:
CAN анализаторы | ЧИП-ТЮНИНГ ЭБУ
« Назад
UART, LIN, CAN DMX512, GPIO over DC power lines communication
О компании
Yamar Electronics
Yamar — частная fabless-компания основанная в 1994 году.
С момента своего основания специализируется на технологии связи по линиям питания постоянного тока с целью сокращение количества проводов. Что позволяет снизить вес, габариты, а также повысить надежность устройств.
Компоненты Yamar применяются в автомобильной, аэрокосмической, осветительной, сельскохозяйственной техники и промышленных предприятий в 51 стране мира. Среди клиентов можно назвать Airbus, Boeing, NASA, Mercedes, MAN, Ford, Volvo, GM, BMW. Микросхемы сертифицированы по ЭМС для работы в бортовой сети автомобилей, грузовиков и самолётов.
В портфолио компании представлено 3 семейства микросхем, отличающих скоростью передачи данных и интерфейсом:
p/n | интерфейс | скорость (кб/с) |
SIG60 | UART / LIN | 115 |
SIG102 | UART / LIN + GPIO | 115 |
DCB1M | SPI / UART | 1400 |
DCAN500 | CAN | 500 |
DMX250 | DMX | 250 |
Такой подход имеет ряд преимуществ перед традиционным способом передачи данных по дополнительному сигнальному кабелю в ряде применений.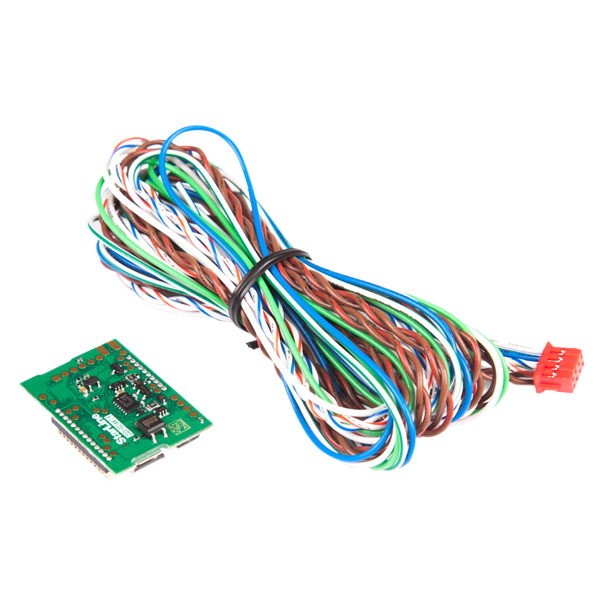
Для применений повышенной плотности установки (например, серверных шкафов) данное решение позволяет высвободить дополнительное место для системы вентиляции и тем самым улучшить охлаждение или же сделать решение ещё более компактным относительно конкурентов использующих традиционные подходы.
Приемопередатчики интерфейсов CAN и LIN компании ON Semiconductor
23 апреля 2009
Часто бывает так, что идеи, изначально задуманные для одних целей, также находят применение в совершенно других областях. Такова судьба интерфейса CAN, который проектировался для использования в автомобилях, а теперь активно применяется в промышленности и автоматизации зданий. Во многом это можно объяснить относительно высокой «избыточностью» возможностей CAN-интерфейса для его применения в автомобильном транспорте. Согласно стандарту CAN, максимально допустимая протяженность одного канала связи между двумя приемопередатчиками сети CAN при скорости обмена 1000 кбит/с не должна превышать 40 метров, а на скорости 10 кбит/с – 5000 м. Для автомобиля эти цифры явно избыточны. Более того, конечная цена решения занимает далеко не последнее место.
Во многом это можно объяснить относительно высокой «избыточностью» возможностей CAN-интерфейса для его применения в автомобильном транспорте. Согласно стандарту CAN, максимально допустимая протяженность одного канала связи между двумя приемопередатчиками сети CAN при скорости обмена 1000 кбит/с не должна превышать 40 метров, а на скорости 10 кбит/с – 5000 м. Для автомобиля эти цифры явно избыточны. Более того, конечная цена решения занимает далеко не последнее место.
По этой и другим причинам относительно недавно на свет появился интерфейс LIN (Local Interconnect Network), – по сути упрощенный, а, соответственно, и более дешевый вариант интерфейса CAN, ориентированный на применение в промышленности и автомобильном транспорте. На самом деле LIN не является конкурентом CAN, наоборот: LIN-сети – удачное дополнение к CAN-сетям. Согласно стандарту ISO 9141, скорость работы узлов LIN-сети не может превышать 20 кбит/с.
В отличие от узлов CAN-сети, в узлах LIN-сети не требуется использование относительно дорогих микропроцессоров/микроконтроллеров со встроенным или внешним CAN-контроллером. Для построения LIN-узла достаточно простого и недорогого микроконтроллера со встроенным аппаратным портом UART (в некоторых решениях вместо аппаратного порта UART возможна его программная эмуляция) и внешнего недорогого приемопередатчика для однопроводной шины LIN.
Для построения LIN-узла достаточно простого и недорогого микроконтроллера со встроенным аппаратным портом UART (в некоторых решениях вместо аппаратного порта UART возможна его программная эмуляция) и внешнего недорогого приемопередатчика для однопроводной шины LIN.
Приемопередатчики для интерфейса LIN
В настоящее время компания ON Semiconductor производит четыре разновидности приемопередатчиков для LIN-сетей (табл. 1). Каждый из них полностью соответствует спецификации LIN rev. 1.3 и rev. 2.0, спроектирован на основе высоковольтной технологии I2T100 (сочетание в одной микросхеме высоковольтных аналоговых и низковольтных цифровых узлов) и производится по бессвинцовой технологии.
Таблица 1. Приемопередатчики ON Semiconductor для сетей на основе интерфейса LIN
| Наименование | Число передат чиков | Число прием ников | Мин. напряже напряжение питания, В | Макс. напряже ние питания, В | Макс. скорость, кбит/с | Макс. выходной ток передат чика, мА | Макс. собственный ток потребления, мА | Корпус |
|---|---|---|---|---|---|---|---|---|
| AMIS-30600LINI1G | 1 | 1 | 7,3 | 18 | 20 | 40 | 0,70 | SOIC-8 |
| AMIS-30600LINI1RG | ||||||||
| NCV7321D10G | 5,0 | 120 | 0,11 | |||||
| NCV7321D10R2G | ||||||||
| NCV7361ADG | 5,25 | 18 | ||||||
| NCV7361ADR2G | ||||||||
| NCV7382DR2G | 7,0 | 40 | 0,02 | 0,024 |
Приемопередатчики AMIS-30600 выдерживают напряжение на шине в очень широком диапазоне напряжений ±40 В, имеют низкий собственный ток потребления в спящем режиме – не более 50 мкА, встроенный фильтр на входе приемника, встроенный узел для управления скоростью нарастания напряжения на выходе передатчика в зависимости от напряжения на входе VBB (внешняя батарея или аккумулятор) с целью экономии заряда батареи.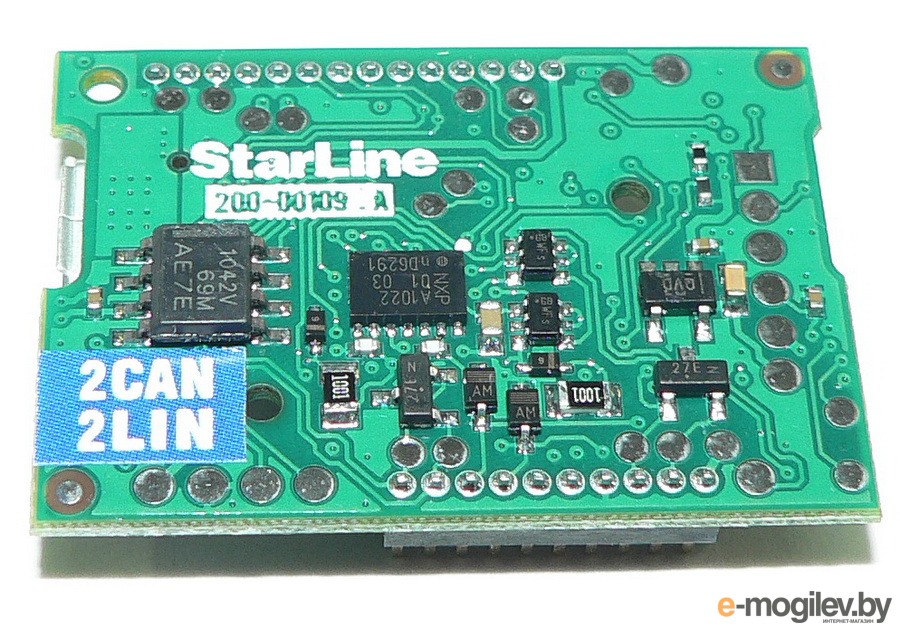
NCV7321 соответствует более новой версии спецификации LIN: rev. 2.1 (поддержана совместимость с ранними версиями) и спецификации J2602. Отличительной особенностью NCV7321 является работа в LIN-сетях с повышенным диапазоном напряжения ±45 В и в приложениях для жестких условий эксплуатации. Стоит отметить расширенные возможности по управлению потребляемой мощностью: для этой цели предназначен внешний вывод WAKE.
NCV7361A имеет встроенный линейный стабилизатор с выходным напряжением 5 В ±2% и максимальным выходным током 50 мА. Подобное решение сокращает число внешних компонентов, так как в LIN-устройствах практически всегда необходим стабилизатор (например, для питания микроконтроллера, управляющего работой LIN-узла). Также в микросхеме реализован супервизор питания, управляющий выводом RESET (длительность сигнала сброса составляет около 100 мс). Этот узел особенно полезен для аппаратного сброса внешнего микроконтроллера сразу после подачи питания на устройство (LIN-узел).
Для NCV7382 основной областью применения являются устройства с высокими требованиями к экономичности. Дополнительный выход INH предназначен для управления внешним стабилизатором, высокий уровень на вход управления которым будет подан при появлении активности на шине или принудительного включения микросхемы через вход EN. Помимо этого значительно сокращен собственный ток потребления приемопередатчика в спящем режиме: 6,5 мкА.
Интерфейс LIN изначально проектировался для применения в автомобильном транспорте, однако широко используется в автоматизации зданий благодаря высокой надежности канала связи. Одним из типовых решений можно назвать удаленные датчики по сбору данных в офисном здании (температура в помещениях, состояния переключателей на дверях, окнах и т.п.). В промышленности LIN используют редко, чаще всего – в виде подсетей для CAN-сетей.
Приемопередатчики для интерфейса CAN
Ассортимент приемопередатчиков от ON Semiconductor для сетей CAN значительно шире, чем аналогичный ассортимент для сетей LIN (табл. 2). Во многом это можно объяснить значительной «разницей в возрасте» двух интерфейсов: CAN примерно на 20 лет «старше» LIN. За это время CAN-интерфейс успел «обрасти» рядом протоколов верхнего уровня: CANopen, DeviceNet и др. Необходимо также учитывать значительную конкуренцию производителей электронных компонентов в этой области. Учитывая все это, компания ON Semiconductor избрала следующую тактику: помимо продажи стандартных приемопередатчиков для CAN-сетей (основоположник – PCA82C250 от Philips), компания разрабатывает микросхемы, уникальные как по характеристикам, так и по возможностям.
2). Во многом это можно объяснить значительной «разницей в возрасте» двух интерфейсов: CAN примерно на 20 лет «старше» LIN. За это время CAN-интерфейс успел «обрасти» рядом протоколов верхнего уровня: CANopen, DeviceNet и др. Необходимо также учитывать значительную конкуренцию производителей электронных компонентов в этой области. Учитывая все это, компания ON Semiconductor избрала следующую тактику: помимо продажи стандартных приемопередатчиков для CAN-сетей (основоположник – PCA82C250 от Philips), компания разрабатывает микросхемы, уникальные как по характеристикам, так и по возможностям.
Таблица 2. Приемопередатчики ON Semiconductor для сетей на основе интерфейса CAN
| Наименование | Число передат чиков | Число прием ников | Мин. напряже ние питания, В | Макс. напряже ние питания, В | Макс. скорость, кбит/с | Макс. выходной ток передат чика, мА | Макс. собствен собственный ток потребления, мА | Корпус |
|---|---|---|---|---|---|---|---|---|
| AMIS-30660CANh3G | 1 | 1 | 4,75 | 5,25 | 1000 | 45 | 8 | SOIC-8 |
| AMIS-30660CANh3RG | ||||||||
| AMIS-30660CANH6G | ||||||||
| AMIS-30660CANH6RG | ||||||||
| AMIS-30663CANG2G | 1 | 1 | 4,75 | 5,25 | 1000 | 45 | 8 | SOIC-8 SOIC-8 |
| AMIS-30663CANG2RG | ||||||||
| AMIS-42700WCGA4H | 2 | 2 | -0,3 | 7 | 1000 | 45 | 8 | SOIC-20 SOIC-20 |
| AMIS-42700WCGA4RH | ||||||||
| AMIS-42770ICAW1G | 1 | 1 | 4,75 | 5,25 | 1000 | 45 | 19,5 | SOIC-20 SOIC-20 |
| AMIS-42770ICAW1RG | ||||||||
| AMIS-41682CANM1G | 1 | 1 | 4,75 | 5,25 | 125 | 45 | 6,3 | SOIC-14 SOIC-14 |
| AMIS-41682CANM1RG | ||||||||
| AMIS-41683CANN1G | 1 | 1 | 4,75 | 5,25 | 125 | 45 | 6,3 | SOIC-14 SOIC-14 |
| AMIS-41683CANN1RG | ||||||||
| AMIS-42670ICAh3G | 1 | 1 | 4,75 | 5,25 | 1000 | 45 | 8 | SOIC-8 SOIC-8 |
| AMIS-42670ICAh3RG | ||||||||
| AMIS-42671ICAB1G | 1 | 1 | 4,75 | 5,25 | 1000 | 45 | 8 | SOIC-8 SOIC-8 |
| AMIS-42671ICAB1RG | ||||||||
| AMIS-42673ICAG1G | 1 | 1 | 4,75 | 5,25 | 1000 | 45 | 8 | SOIC-8 SOIC-8 |
| AMIS-42673ICAG1RG | ||||||||
| AMIS-42665TJAA1G | 1 | 1 | 4,75 | 5,25 | 1000 | 45 | 8 | SOIC-14 SOIC-14 SOIC-8 SOIC-8 SOIC-8 |
| AMIS-42665TJAA1RG | ||||||||
| AMIS-42665TJAA3L | ||||||||
| AMIS-42665TJAA3RL | ||||||||
| AMIS-42665TJAA6RG | ||||||||
| AMIS-42675ICAA1G | 1 | 1 | 4,75 | 5,25 | 1000 | 45 | 8 | SOIC-8 SOIC-8 |
| AMIS-42675ICAA1RG | ||||||||
| NCV7341D21G | 1 | 1 | 4,75 | 5,25 | 1000 | 55 | 10 | SOIC-14 SOIC-14 |
| NCV7341D21R2G |
В настоящее время микроконтроллеры, используемые в качестве контроллеров конечных узлов CAN-сетей, в целях повышения их экономичности питаются от источников напряжения 3,3 В. При этом подавляющее большинство приемопередатчиков для сетей CAN рассчитаны на напряжение питания 5 В, поэтому возникает ряд сложностей с сопряжением 5-вольтовых приемопередатчиков и 3,3-вольтовых микроконтроллеров (разумеется, речь идет о тех микроконтроллерах, которые несовместимы с логическими уровнями 5 В). Специально для подобных случаев ON Semiconductor производит высокоскоростные приемопередатчики CAN с двойным питанием: AMIS-30663, AMIS-41682, AMIS-41683 и AMIS-42673. В них, помимо вывода питания аналоговой части 5 В, предусмотрен дополнительный вывод для питания цифровой части 3,3 В. Микросхемы полностью соответствуют стандарту ISO 11898-2, допускают напряжение ±35 В на входе дифференциального приемника, а передатчик имеет встроенную функцию автоматического отключения от шины при «зависаниях» управляющего микроконтроллера по истечению определенного времени (тайм-аут). Также стоит отметить высокую стойкость приемопередатчиков к электростатическим разрядам: ±8 кВ.
При этом подавляющее большинство приемопередатчиков для сетей CAN рассчитаны на напряжение питания 5 В, поэтому возникает ряд сложностей с сопряжением 5-вольтовых приемопередатчиков и 3,3-вольтовых микроконтроллеров (разумеется, речь идет о тех микроконтроллерах, которые несовместимы с логическими уровнями 5 В). Специально для подобных случаев ON Semiconductor производит высокоскоростные приемопередатчики CAN с двойным питанием: AMIS-30663, AMIS-41682, AMIS-41683 и AMIS-42673. В них, помимо вывода питания аналоговой части 5 В, предусмотрен дополнительный вывод для питания цифровой части 3,3 В. Микросхемы полностью соответствуют стандарту ISO 11898-2, допускают напряжение ±35 В на входе дифференциального приемника, а передатчик имеет встроенную функцию автоматического отключения от шины при «зависаниях» управляющего микроконтроллера по истечению определенного времени (тайм-аут). Также стоит отметить высокую стойкость приемопередатчиков к электростатическим разрядам: ±8 кВ. Микросхемы идеально подходят для применения в промышленных CAN-сетях с питанием 12/24 В. AMIS-30663 и AMIS-42673 способны работать на скоростях до 1 Мбит/с, а AMIS-41682, AMIS-41683 – до 125 кБит.
Микросхемы идеально подходят для применения в промышленных CAN-сетях с питанием 12/24 В. AMIS-30663 и AMIS-42673 способны работать на скоростях до 1 Мбит/с, а AMIS-41682, AMIS-41683 – до 125 кБит.
AMIS-30660, AMIS-30670 – высокоскоростные приемопередатчики с дополнительным входом Silent, позволяющим отключать встроенный передатчик от шины, в то время как приемник продолжает работать. Такая функция удобна для предотвращения непреднамеренного захвата шины CAN после перевода управляющего микроконтроллера в спящий режим. По параметрам AMIS-30660 и AMIS-30670 аналогичны описанным выше приемопередатчикам CAN с двойным питанием.
AMIS-42665, AMIS-42675 – входят в список самых распространенных в использовании высокоскоростных приемопередатчиков (1 Мбит/с). Идеально подходят для использования в CAN-узлах, критичных к собственной потребляемой мощности, то есть с батарейным питанием: внешний вход STB (Standby) позволяет полностью отключать приемопередатчик от CAN-сети, при этом его ток потребления сокращается до 10 мкА (рис. 1). Также в микросхемах реализован режим автоматического пробуждения из спящего режима при появлении активности на шине CAN.
1). Также в микросхемах реализован режим автоматического пробуждения из спящего режима при появлении активности на шине CAN.
Рис. 1. Типовая схема включения приемопередатчика AMIS-42665
AMIS-42671 – приемопередатчик с функцией автоматического определения скорости передачи данных по шине CAN. Для этой цели предусмотрен дополнительный вход AUTB (Autobaud), высокий логический уровень на этом входе фактически отключает вход TxD от передатчика и подключает его по схеме логического «И» с данными, поступающими от приемника. В этом режиме CAN-контроллер «слушает» сеть: если скорость передачи данных отличается от скорости, заданной контроллером узла, то тот автоматически формирует ошибку. Перебирая все определенные стандартом CAN скорости, можно определить текущую скорость работы шины и далее настроиться на нее. Приемопередатчики AMIS-42671 полностью соответствуют стандарту ISO 11898-2, допускают напряжение ±35 В на входе дифференциального приемника, обладают высокой стойкостью к электростатических разрядам до ±8 кВ и имеют узел автоматического отключения при перегреве.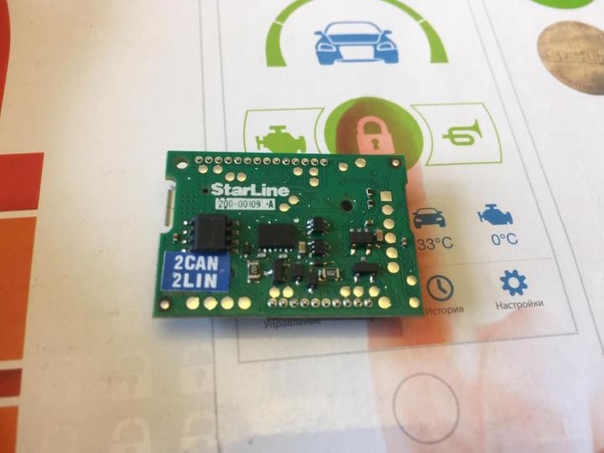
NCV7341 – высокоскоростной экономичный приемопередатчик, идеально подходящий для применения в промышленных CAN-сетях с питанием 12/24 В. Сдвоенное питание микросхемы (отдельно питаются цифровая и аналоговая части) позволяет использовать внешние CAN-контроллеры, рассчитанные на питание от 3,3 В и несовместимые с логическим уровнем 5 В (рис. 2). NCV7341 идеально подходит для использования в узлах с батарейным питанием: автоматический переход в экономичный режим при падении напряжения на внешней батарее или аккумуляторе (INH), вход управления режимом питания (STB), выход сигнала ошибки питания (ERR), вход автоматического пробуждения при появлении внешнего питания (WAKE), вход разрешения работы (EN). Дополнительный внутренний источник, предназначенный для выравнивания потенциалов на шине CAN (VSPLIT), позволяет значительно сократить на ней уровень электромагнитного излучения.
Рис. 2. Схема подключения приемопередатчика NCV7341 к внешнему 3,3 В CAN-контроллеру
2. Схема подключения приемопередатчика NCV7341 к внешнему 3,3 В CAN-контроллеру
Отдельного внимания заслуживают двухканальные приемопередатчики AMIS-42700 и AMIS-42770. Их электрические характеристики практически совпадают с характеристиками описанных выше CAN-приемопередатчиков. Самая примечательная особенность этих микросхем – наличие в них двух одинаковых приемопередатчиков, предназначенных для их подключения к двум независимым шинам CAN и одному CAN-контроллеру. Основная область применения – работа в качестве повторителей для протяженных сетей CAN и распределителей/разветвителей (CAN hub). Встроенный контроллер CAN-пакетов (рис. 3) позволяет вовсе обойтись без внешнего CAN-контроллера, как, например, в весьма распространенном решении – повторитель/репитер (рис. 4). Дополнительные выводы Text и Rint позволяют объединять эти приемопередатчики друг с другом, а управление организовывать одним единственным CAN-контроллером. Тем самым появляется возможность простого и дешевого способа организации сложных по топологии CAN-сетей.
Тем самым появляется возможность простого и дешевого способа организации сложных по топологии CAN-сетей.
Рис. 3. Внутренняя структурная схема двухканальных приемопередатчиков AMIS-42700 и AMIS-42770
Рис. 4. Типовая схема включения AMIS-42700 в качестве повторителя для протяженной сети CAN
Заключение
Каждый из приемопередатчиков для сетей CAN и LIN от компании ON Semiconductor уникален по своим возможностям и характеристикам: низкая потребляемая мощность в спящем режиме, низкий уровень электромагнитного излучения, высокий диапазон входных напряжений на шине, защита по току выходных цепей, защита от перегрева, широкий диапазон рабочей температуры -40…125°С. А расширенная функциональность микросхем позволяет использовать их в самых нестандартных схемотехнических решениях.
А расширенная функциональность микросхем позволяет использовать их в самых нестандартных схемотехнических решениях.
Получение технической информации, заказ образцов, поставка — e-mail: [email protected]
•••
Наши информационные каналы
Описание шиныLIN — простое введение (2021)
Требуется простое и практичное введение в шину LIN?
В этом руководстве мы познакомим вас с основами протокола локальной сети межсоединений (LIN), включая LIN против CAN, варианты использования, как работает LIN и шесть типов кадров LIN.
Примечание. Это практическое введение , поэтому мы также рассмотрим основы регистрации данных шины LIN.
Узнайте больше ниже!
Вы также можете посмотреть наше вступительное видео по шине LIN выше.
Что такое шина LIN?
Шина LIN является дополнением к CAN-шине .
Он предлагает более низкую производительность и надежность, но при этом значительно снижает затраты. Ниже мы даем краткий обзор шины LIN и сравнение шины LIN с шиной CAN.
- Недорогой вариант (если скорость / отказоустойчивость не критичны)
- Часто используется в автомобилях для окон, дворников, кондиционеров и т. Д.
- Кластеры LIN состоят из 1 главного и до 16 подчиненных узлов
- Однопроводный (+ земля) со скоростью 1-20 кбит / с при максимальной длине шины 40 м
- Планирование, запускаемое по времени, с гарантированным временем задержки
- Переменная длина данных (2, 4, 8 байтов)
- LIN поддерживает обнаружение ошибок, контрольные суммы и конфигурацию
- Рабочее напряжение 12В
- Физический уровень на основе ISO 9141 (K-line)
- Поддержка спящего режима и пробуждения
- Большинство новых автомобилей имеют 10+ узлов LIN
LIN и шина CAN
- LIN — это более низкая стоимость (меньше ремней, без лицензионных сборов, дешевые узлы)
- CAN использует скрученные экранированные двойные провода 5 В по сравнению с однопроводным LIN 12 В
- Мастер LIN обычно служит шлюзом к шине CAN
- LIN является детерминированным, а не управляемым событиями (т.
 е.е. нет автобусного арбитража) Кластеры
е.е. нет автобусного арбитража) Кластеры - LIN имеют один мастер — CAN может иметь несколько
- CAN использует 11 или 29-битные идентификаторы против 6-битных идентификаторов в LIN
- CAN обеспечивает скорость до 1 Мбит / с по сравнению с LIN при максимальной скорости 20 кбит / с.
 е.е. нет автобусного арбитража)
е.е. нет автобусного арбитража)LIN
Ниже мы кратко рассмотрим историю протокола LIN:
- 1999: LIN 1.0 выпущен Консорциумом LIN (BMW, VW, Audi, Volvo, Mercedes-Benz, Volcano Automotive и Motorola)
- 2000: Протокол LIN обновлен (LIN 1.1, LIN 2.2)
- 2002: выпущено LIN 1.3, в основном изменяющее физический уровень
- 2003: выпущено LIN 2.0, добавлены основные изменения (широко используются)
- 2006: выпущена спецификация LIN 2.1
- 2010: выпущено LIN 2. 2A, теперь широко внедренные версии
- 2010-12: Стандартизированный LIN SAE как SAE J2602, на основе LIN 2.0
- 2016: CAN в автоматизации стандартизированный LIN (ISO 17987: 2016)
 2A, теперь широко внедренные версии
2A, теперь широко внедренные версииLIN автобус будущего
Протокол LIN играет все более важную роль в обеспечении недорогого расширения функций в современных автомобилях.
Таким образом, шина LIN приобрела популярность за последнее десятилетие: к 2020 году ожидается> 700 миллионов узлов в автомобилях по сравнению с ~ 200 миллионами в 2010 году.
Кибербезопасность и новые протоколыОднако с распространением LIN растет и внимание к кибербезопасности. LIN лица подверженности риску, аналогичному CAN, и поскольку LIN играет роль, например, в сиденья и рулевое колесо, может потребоваться устранение этих рисков.
В автомобильных сетях будущего наблюдается рост CAN FD, FlexRay и автомобильного Ethernet. Хотя есть неопределенность относительно роли каждой из этих систем
будет играть роль в будущих автомобилях, ожидается, что кластеры шин LIN останутся жизненно важными в качестве недорогого решения для постоянно растущего спроса на функции в современных
транспортных средств.
Хотя есть неопределенность относительно роли каждой из этих систем
будет играть роль в будущих автомобилях, ожидается, что кластеры шин LIN останутся жизненно важными в качестве недорогого решения для постоянно растущего спроса на функции в современных
транспортных средств.
В рамках разработки более всеобъемлющей формулировки для шины LIN согласованная формулировка CiA / ISO / SAE будет переведена на командир / отвечающую. Таким образом, это будет стандартная формулировка де-факто, используемая в большинстве руководящих принципов и спецификаций шины LIN в будущем.
Приложения шины LIN
Сегодня шина LIN является стандартом де-факто практически во всех современных транспортных средствах — с примерами автомобильных вариантов использования ниже:
- Руль: Круиз-контроль, дворники, климат-контроль, магнитола
- Комфорт: Датчики температуры, люка, света, влажности
- Трансмиссия: Датчики положения, скорости, давления
- Двигатель: Малые двигатели, двигатели охлаждающих вентиляторов
- Кондиционер: Двигатели, панель управления (кондиционер часто бывает сложным)
- Дверь: Боковые зеркала заднего вида, стеклоподъемники, регулировка сидений, замки
- Сиденья: Двигатели положения, датчики давления
- Другое: Стеклоочистители, датчики дождя, фары, обдув
Кроме того, шина LIN также используется в других отраслях промышленности :
- Бытовая техника: Стиральные машины, холодильники, плиты
- Автоматизация: Технологическое оборудование, металлообработка
Пример: LIN vs CAN оконное управление
Узлы LIN обычно объединяются в кластеры, каждый из которых имеет ведущее устройство, которое взаимодействует с магистральной шиной CAN.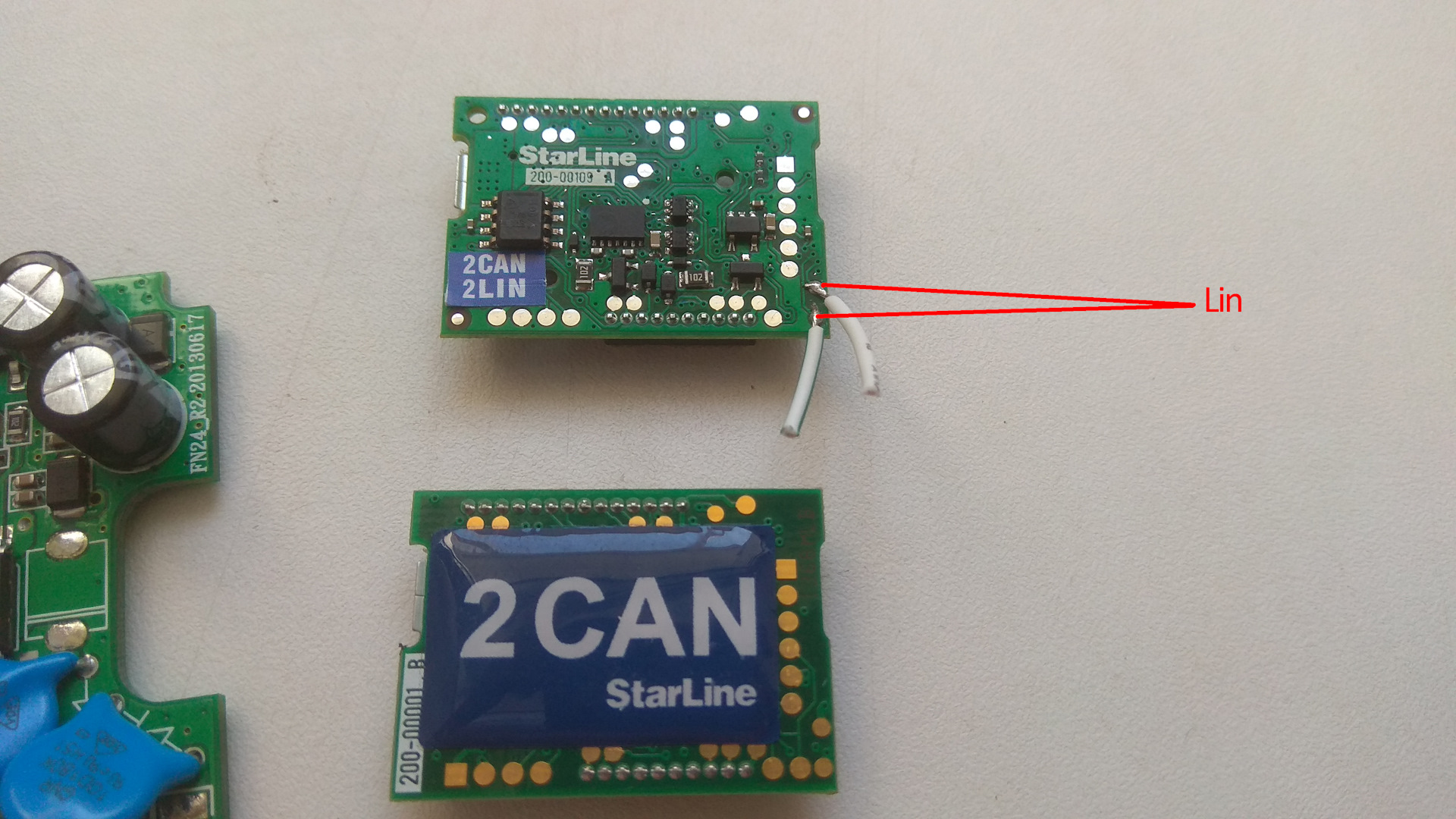
Пример: На правом сиденье автомобиля можно опустить окно левого сиденья. Для этого вы нажимаете кнопку, чтобы отправить сообщение через один кластер LIN в другой кластер LIN через CAN. автобус. Это заставляет второй кластер LIN опускаться в окно левого сиденья.
Как работает шина LIN?
СвязьLIN по своей сути относительно проста:
Главный узел проходит через каждый из подчиненных узлов, отправляя запрос информации, и каждый подчиненный отвечает данными при опросе.Байты данных содержат шину LIN сигналы (в необработанном виде).
Однако с каждым обновлением спецификации в спецификацию LIN добавлялись новые функции, что делало ее более сложной.
Ниже мы рассмотрим основы: фрейм LIN и шесть типов фреймов.
Формат кадра LIN
Проще говоря, кадр сообщения шины LIN состоит из заголовка и ответа .
Обычно мастер LIN передает заголовок на шину LIN. Это запускает ведомое устройство, которое отправляет в ответ до 8 байтов данных.
Это запускает ведомое устройство, которое отправляет в ответ до 8 байтов данных.
Этот общий формат кадра LIN можно проиллюстрировать следующим образом:
Поля кадра LINBreak: Поле прерывания синхронизации (SBF), также известное как Break, имеет длину не менее 13 + 1 бит (а на практике чаще всего 18 + 2 бита). Поле Break действует как уведомление о начале кадра для всех узлов LIN на шине.
Sync: 8-битное поле Sync имеет предварительно определенное значение 0x55 (в двоичном виде 01010101). Эта структура позволяет узлам LIN определять время между нарастающим / спадающим фронтом и, следовательно, скоростью передачи, используемой главным узлом.Это позволяет каждому из них оставаться в синхронизации.
Идентификатор: Идентификатор — это 6 битов, за которыми следуют 2 бита четности. Идентификатор действует как идентификатор для каждого отправленного сообщения LIN и того, какие узлы
реагировать на заголовок. Подчиненные устройства определяют действительность поля идентификатора (на основе битов четности) и действуют через:
Подчиненные устройства определяют действительность поля идентификатора (на основе битов четности) и действуют через:
- Игнорировать последующую передачу данных
- Слушать данные, передаваемые с другого узла
- Опубликовать данные в ответ на заголовок
Обычно за один раз опрашивается одно ведомое устройство, что означает нулевой риск столкновения (и, следовательно, не требует арбитража).
Обратите внимание, что 6 бит позволяют использовать 64 идентификатора, из которых
ID 60-61 используются для диагностики (подробнее ниже), а 62-63 зарезервированы.
Данные: Когда ведомое устройство LIN опрашивается ведущим устройством, оно может ответить, передав 2, 4 или 8 байтов данных. Начиная с LIN 2.0, длина данных
зависит от диапазона идентификаторов (ID 0-31: 2 байта, 32-47: 4 байта, 48-63: 8 байтов). Байты данных содержат фактическую информацию, передаваемую в форме сигналов LIN. LIN
сигналы упаковываются в байты данных и могут быть e. грамм. всего 1 бит или несколько байтов.
грамм. всего 1 бит или несколько байтов.
Контрольная сумма: Как и в CAN, поле контрольной суммы обеспечивает достоверность кадра LIN. Контрольная сумма classic 8 бит основана на суммировании только байты данных (LIN 1.3), тогда как улучшенный алгоритм контрольной суммы также включает поле идентификатора (LIN 2.0).
Межбайтное пространство и пространство ответаПоскольку недорогие ведомые устройства LIN часто имеют низкую производительность, могут возникать задержки. Чтобы смягчить это, можно дополнительно добавить межбайтовое пространство, как показано ниже.Далее, между заголовок и ответ, существует «пространство ответа», которое дает подчиненным узлам достаточно времени, чтобы отреагировать на заголовок главного.
Регистрация данных шины LIN
CANedge позволяет легко записывать данные шины LIN на SD-карту емкостью 8–32 ГБ. Просто подключите его к своему
Приложение LIN для начала регистрации и обработки данных с помощью бесплатного программного обеспечения / API.
Например, бесплатный графический интерфейс / API asammdf позволяет DBC декодировать данные LIN в физические значения и е.грамм. Постройте ваши LIN-сигналы.
узнать большеШесть типов кадров LIN
Существует несколько типов LIN-фреймов, хотя на практике большая часть обмена данными осуществляется через «безусловные фреймы».
Обратите также внимание на то, что каждый из нижеследующих соответствует одной и той же базовой структуре кадра LIN — и отличается только синхронизацией или содержанием байтов данных.
Ниже мы кратко опишем каждый тип фрейма LIN:
Безусловные кадры
Форма связи по умолчанию, при которой ведущее устройство отправляет заголовок, запрашивая информацию у определенного ведомого устройства.Соответствующий ведомый реагирует соответственно
Кадры запуска события
Мастер опрашивает несколько подчиненных. Подчиненное устройство отвечает, если его данные были обновлены, с его защищенным идентификатором в 1-м байте данных. Если несколько ответов, возникает коллизия и
мастер по умолчанию использует безусловные кадры
Подчиненное устройство отвечает, если его данные были обновлены, с его защищенным идентификатором в 1-м байте данных. Если несколько ответов, возникает коллизия и
мастер по умолчанию использует безусловные кадры
Спорадические рамки
Отправляется мастером, только если он знает, что конкретное ведомое устройство обновило данные. Ведущее устройство «действует как ведомое» и предоставляет ответ на свой собственный заголовок, позволяя ему предоставлять подчиненные узлы с «динамической» информацией
Диагностические рамки
Начиная с LIN 2.0, идентификаторы 60-61 используются для чтения диагностических данных от ведущего или ведомого устройства. Кадры всегда содержат 8 байтов данных. ID 60 используется для главного запроса, 61 для подчиненный ответ
Пользовательские кадры
ID 62 — это определяемый пользователем фрейм, который может содержать информацию любого типа.
Зарезервированные кадры
Зарезервированные кадры имеют идентификатор 63 и не должны использоваться в сетях LIN, соответствующих LIN 2.0.
Дополнительные разделы LIN
Ниже мы включаем две расширенные темы — щелкните, чтобы развернуть.
Файл конфигурации узла LIN (NCF) и файл описания LIN (LDF)Для быстрой настройки шинных сетей LIN стандартные узлы LIN поставляются с файлами конфигурации узла (NCF). NCF подробно описывает возможности узла LIN и является ключевой частью топологии LIN.
OEM затем объединит эти NCF узлов в файл кластера, называемый файлом описания LIN (LDF). Затем мастер настраивает и управляет кластером LIN на основе этот LDF — например, расписание для заголовков.
Обратите внимание, что узлы шины LIN можно перенастроить с помощью диагностических кадров, описанных ранее. Этот тип конфигурации может быть выполнен во время производства — или, например,
каждый раз при запуске сети. Например, это можно использовать для изменения идентификаторов сообщений узла.
Например, это можно использовать для изменения идентификаторов сообщений узла.
Если вы знакомы с CANopen, вы можете увидеть параллели с файлом конфигурации устройства, используемым для предварительной настройки узлов CANopen — и роль объектов служебных данных в обновлении этих конфигураций.
LIN Sleep & WakeupКлючевым аспектом LIN является не только экономия затрат, но и энергопотребление.
Для этого каждое ведомое устройство LIN может быть переведено в спящий режим, если ведущее устройство отправит диагностический запрос (ID 60) с первым байтом, равным 0. Каждое ведомое устройство также автоматически засыпает после 4 секунд бездействия шины.
Ведомые устройства могут быть разбужены либо ведущим, либо ведомым узлами, отправившими запрос на пробуждение. Это достигается путем принудительного доминирования шины в течение 250-5000 микросекунд,
с последующей паузой на 150-250 мс. Это повторяется до 3 раз, если ведущий не отправляет заголовок. После этого требуется пауза в 1,5 секунды перед отправкой 4-го
запрос на пробуждение. Обычно узлы просыпаются после 1-2 импульсов.
Это повторяется до 3 раз, если ведущий не отправляет заголовок. После этого требуется пауза в 1,5 секунды перед отправкой 4-го
запрос на пробуждение. Обычно узлы просыпаются после 1-2 импульсов.
Файл описания LIN (LDF) и файлы DBC
В рамках рабочего процесса регистратора данных LIN вам может потребоваться декодирование исходных данных шины LIN в физические значения. В частности, это включает извлечение сигналов LIN из LIN. фрейм полезной нагрузки и декодирования их в удобочитаемую форму.
Этот процесс декодирования шины LIN аналогичен декодированию шины CAN и требует той же информации:
- ID: какой идентификатор кадра LIN содержит сигнал шины LIN
- Имя: имя сигнала LIN должно быть известно
- Стартовый бит: начальная позиция сигнала LIN в полезной нагрузке
- Длина: длина сигнала шины LIN
- Порядок следования байтов: сигналы LIN имеют обратный порядок следования байтов (порядок байтов Intel) Масштаб
- : как умножить десятичное значение битов сигнала LIN
- Смещение: на какую константу должно смещаться значение сигнала LIN.
- Единица / Мин / Макс: Дополнительная вспомогательная информация (опционально)

Эта информация обычно доступна как часть файла описания LIN (LDF) для локальной сети межсоединений.Однако, поскольку многие программные инструменты изначально не поддерживают формат LDF, ниже мы объясним, как использовать файлы DBC в качестве альтернативы.
Файл описания LIN (LDF) и файлы DBC Как видно из вступления к шине CAN и файла DBC, указанные выше записи эквивалентны информации, хранящейся в CAN DBC.
файл. Это означает, что простым методом хранения правил декодирования шины LIN является использование формата файла DBC, который поддерживается многими программными средствами и инструментами API (включая программные инструменты CANedge, такие как asammdf).Например, вы можете загрузить файл LIN DBC и необработанные данные шины LIN.
из CANedge в asammdf для извлечения сигналов шины LIN из данных, которые затем можно построить, проанализировать или экспортировать.
Во многих случаях у вас может не быть непосредственно доступного файла LIN DBC, но вместо этого у вас может быть файл описания LIN (LDF). Поэтому ниже мы сосредоточимся на том, как вы можете преобразовать соответствующую информацию сигнала LIN в формат DBC.
Примечание: LDF обычно содержит различную другую информацию, относящуюся к работе шины LIN, на которой мы здесь не останавливаемся.Подробное описание протокола LIN и подробное описание спецификации LDF см. В стандарте PDF для протокола LIN.
Как преобразовать файл описания LIN (LDF) в DBC [вкл. Примеры]Ниже мы приводим пример, демонстрирующий, как можно извлечь информацию о сигнале LIN из LDF и ввести ее в файл DBC. Мы используем очень упрощенный файл описания LIN (только с одним сигналом и исключая некоторые разделы).
Вы можете развернуть приведенные ниже примеры, чтобы увидеть сигнал LIN, BatteryVoltage , в формате LDF и в формате DBC.Вы также можете загрузить необработанный файл журнала шины LIN (MF4) из CANedge2 с данными для этого сигнала, который вы можете открыть и декодировать DBC в asammdf:
Руководство по преобразованию LDF в DBC
Короче говоря, чтобы преобразовать файл LDF в DBC, вы выполните следующие шаги для каждого сигнала LIN:
- Получите имя и длину сигнала LIN из раздела «Сигналы».
- Получите имя, идентификатор и длину сигнального сообщения LIN из раздела кадров.
- Получить начало бита сигнала LIN из раздела кадров
- Перейдите в раздел LDF Signal_encoding_types и найдите «Enc_ [имя_сигнала]»
- Получить оставшуюся информацию с помощью синтаксиса: ‘Physical_value, [min], [max], [scale], [offset], «[unit]»;’

Если вы хотите создать свой собственный файл LIN DBC, мы рекомендуем вам просмотреть наше введение в файл DBC для получения подробной информации о синтаксисе, а также об инструментах редактора DBC.
Мелкие подводные камни
Преобразование из LDF в DBC не совсем однозначное. В частности, обратите внимание, что сигнал LIN BatteryVoltage имеет 2 записи для физического значения, одну для десятичного диапазона 0.
до 32000 и один для от 32001 до 65533. В этом конкретном случае действительны только данные из первого диапазона (единица измерения «недействительна» для 2-го диапазона). Однако в некоторых случаях
может быть несколько диапазонов, для которых требуются отдельные коэффициенты масштабирования — то, что невозможно обработать в формате файла DBC.В этом случае вам нужно будет выбрать один из
диапазоны и например рассматривать результаты за пределами этого диапазона как недействительные.
Однако в некоторых случаях
может быть несколько диапазонов, для которых требуются отдельные коэффициенты масштабирования — то, что невозможно обработать в формате файла DBC.В этом случае вам нужно будет выбрать один из
диапазоны и например рассматривать результаты за пределами этого диапазона как недействительные.
Это также самый простой способ обработки записей LIN-сигнала ‘logical_value’ в Signal_encoding_types. раздел. Обычно они отражают то, как следует обрабатывать определенные значения сигнала LIN (например, как ошибки). Один из способов обработки этих записей — игнорировать их и возможно, исключите их как часть постобработки данных — аналогично тому, как значения байтов FF в шине CAN часто исключаются, поскольку они представляют собой недопустимые или неприменимые данные.
Регистрация данных шины LIN — примеры использования
Регистрация данных по шинеLIN актуальна для различных случаев использования:
Разработка CAN / LIN автомобиля
Регистрация данных CAN / LIN с помощью гибридного регистратора является ключом к разработке OEM-автомобилей и может использоваться для оптимизации или диагностики
Узнать большеПолевой прототип телематики
Данные CAN / LIN с автомобильного прототипа оборудования могут быть собраны в большом масштабе с помощью гибридных логгеров IoT CAN / LIN для ускорения исследований и разработок
Узнать большеПрофилактическое обслуживание
Промышленное оборудование можно контролировать с помощью логгеров IoT CAN / LIN в облаке для прогнозирования и предотвращения поломок с помощью моделей прогнозирования
Узнать большеДиагностика редких проблем с LIN
Регистратор шины LIN может служить «черным ящиком» для промышленного оборудования, предоставляя данные для e. грамм. диагностика споров или редких проблем
грамм. диагностика споров или редких проблем
У вас есть вариант использования регистрации данных LIN? Получите бесплатный спарринг!
Связаться с намиПрактические рекомендации по регистрации данных LIN
Ниже мы перечисляем ключевые моменты для регистрации данных вашей шины LIN:
Регистратор LIN против интерфейса LINДля записи данных шины LIN вам понадобится регистратор данных шины LIN и / или интерфейс. Регистратор данных шины LIN с SD-картой дает возможность записывать данные в автономном режиме — i.е. во время фактического использования автомобиля. Интерфейс, с другой стороны, полезен, например, во время динамометрическое тестирование работоспособности автомобиля.
Для автономных регистраторов LIN ключевым моментом является то, что устройство должно быть plug & play, компактным и недорогим, чтобы его можно было использовать в масштабных приложениях, например автопарк.
CAN vs. LIN поддержкаЧасто вам нужно объединить данные шины LIN с данными шины CAN, чтобы получить целостное представление об используемом автомобиле — например:
- Как поведение водителя соотносится с использованием различных функций шины LIN?
- Возникают ли проблемы во взаимодействии между мастерами LIN и шиной CAN?
- Связаны ли проблемы, связанные с LIN, с определенными событиями CAN?
Чтобы объединить эти данные, вам понадобится гибридный регистратор CAN / LIN с несколькими каналами. Кроме того, поддержка CAN FD также является ключевой, поскольку ожидается, что она будет все чаще внедряться в новых
транспортных средств.
Кроме того, поддержка CAN FD также является ключевой, поскольку ожидается, что она будет все чаще внедряться в новых
транспортных средств.
Сбор записанных данных шины LIN может быть проблемой, если необходимо физически извлечь данные, например, из большой автопарк. Здесь регистратор CAN / LIN с поддержкой WiFi может быть мощное решение.
Вы просто указываете точку доступа Wi-Fi, в радиусе действия которой время от времени будет находиться автомобиль, и данные будут автоматически выгружаться с SD-карты при нахождении в зоне действия.Также можно добавить точку доступа сотовой связи в автомобиле для передачи данных почти в реальном времени.
Нужно регистрировать данные шины LIN?
Получите свой регистратор CAN / LIN сегодня!
Рекомендовано для вас
Преобразователь локальной сети межсоединений (LIN) в сеть контроллеров (шина CAN)
Автор: Новости отрасли на
Шина LIN (Local Interconnect Network) — это недорогой протокол последовательной связи, который эффективно поддерживает удаленное приложение в сети автомобиля. В частности, он предназначен для мехатронных узлов в распределенных автомобильных приложениях, но в равной степени подходит и для промышленных приложений. Он предназначен для дополнения существующей сети CAN, ведущей к иерархическим сетям в автомобилях.
В частности, он предназначен для мехатронных узлов в распределенных автомобильных приложениях, но в равной степени подходит и для промышленных приложений. Он предназначен для дополнения существующей сети CAN, ведущей к иерархическим сетям в автомобилях.
Controller Area Network (CAN Bus) — это надежный стандарт автомобильной шины, предназначенный для того, чтобы микроконтроллеры и устройства могли обмениваться данными друг с другом в приложениях без главного компьютера. Это протокол на основе сообщений, изначально разработанный для мультиплексной электропроводки в автомобилях с целью экономии меди, но также используется во многих других контекстах.
Модуль PCAN-LIN от phytools позволяет пользователям общаться через шину CAN, шину LIN и последовательный интерфейс. Модуль поставляется в пластиковом корпусе. Микропрограммное обеспечение устройства обеспечивает обмен данными между различными шинными системами, а программное обеспечение для конфигурирования позволяет настраивать различные режимы работы. Например, при настройке в качестве ведущего устройства LIN, PCAN-LIN может запрашивать данные и отправлять входящие данные LIN на шину CAN и / или последовательный интерфейс.
Например, при настройке в качестве ведущего устройства LIN, PCAN-LIN может запрашивать данные и отправлять входящие данные LIN на шину CAN и / или последовательный интерфейс.
Скорость передачи данных по умолчанию для LIN составляет 19200 бит / с.Данные CAN-шины напрямую направляются в LIN без смещения (смещение 0). Скорость передачи данных по умолчанию для CAN составляет 500 Кбит / с. Версия High Speed имеет максимальную скорость шины CAN 1 Мбит / с.
Функции
- Отправка / получение кадров LIN 1.x и 2.0
- Стандартная скорость передачи данных установлена на 19200 бит / с для LIN и на 500 кбит / с для CAN
- Доступна электрическая развязка между RS-232 и CAN / LIN (максимум 1 кВ, опция)
- Доступно для использования в качестве подчиненного устройства LIN или главного / подчиненного устройства
- Шлюз общего назначения (или маршрутизатор при использовании функции кода приема / маски принятия) от:
- RS-232 до LIN (и обратно)
- CAN Bus to LIN (и обратно)
- RS-232 to CAN (ограниченная полоса пропускания)
- Отдельные кадры LIN могут быть инициированы через CAN-шину или RS-232
- Обработка определяемого пользователем Список LIN-ID (планировщик с ограниченным количеством записей, циклическая обработка, если требуется)
- Напряжение питания 8 — 18 В
- Дополнительное моделирование ведомых устройств LIN. Данные могут быть изменены через фреймы шины CAN (необходимо изменить прошивку).
 Данные могут быть изменены через фреймы шины CAN (необходимо изменить прошивку).
Данные могут быть изменены через фреймы шины CAN (необходимо изменить прошивку). Дополнительная информация …
Это коммутационная плата шины LIN с трансивером Microchip MCP2004A.
Характеристики
- Соответствует SAE J2602
- Соответствует спецификациям LIN-Bus 1.3, 2.0 и 2.1
- Защита от сброса нагрузки 43 В постоянного тока
- Логическая схема 3,3 В постоянного тока или 5 В постоянного тока
- Конфигурация ведущего или ведомого устройства (выберите ведущее устройство, закрыв JP3)
- Ватт на входе через 2.Гнездо 1 мм или винтовой зажим
Дополнительная информация …
Продукты и услуги по разработке для LIN
Введение в технологию LIN
Локальная межкомпонентная сеть
LIN (Local Interconnect Network) — это недорогая система последовательной связи, которая была специально разработана для сшивания простых электронных узлов в автомобилях. LIN особенно полезен в тех областях, где должны быть объединены в сеть простые датчики и исполнительные механизмы, но где эффективность CAN (Controller Area Network) не требуется.
LIN особенно полезен в тех областях, где должны быть объединены в сеть простые датчики и исполнительные механизмы, но где эффективность CAN (Controller Area Network) не требуется.
Как правило, подсистемы, связанные с LIN (например, двери, сиденья, рулевое колесо), подключены к сетям на основе CAN более высокого порядка (кузов, шасси). Это обеспечивает простой доступ к средствам диагностики и обслуживания на основе CAN.
Принцип связи
Технология LIN — это последовательный однопроводной протокол связи, основанный на стандартном интерфейсе SCI (UART). Доступ к шине LIN контролируется мастером, который гарантирует максимальное время задержки.Особенностью LIN является синхронизация подчиненных устройств через шину, реализация которой возможна с помощью недорогих узлов с простыми резонансными цепями. Обмен данными осуществляется по однопроводной линии 12 В с максимальной скоростью передачи данных 20 кбит / с.
Из-за небольшого количества идентификаторов (64), а также относительно низкой скорости передачи данных типичная система LIN имеет до 16 узлов. Синхронизация часов, простая связь по UART и однопроводная среда — все это способствует низкой стоимости системы LIN.
Синхронизация часов, простая связь по UART и однопроводная среда — все это способствует низкой стоимости системы LIN.
Формат сообщения LIN
Передача телеграммы LIN начинается с 13-битного доминирующего уровня (прерывание синхронизации), передаваемого ведущим устройством, которое используется для идентификации начала кадра. Затем мастер передает поле синхронизации (альтернативные последовательности 1-0). Это может использоваться подчиненным узлом для синхронизации часов.
После поля синхронизации идентификатор передается мастером. Он состоит из 6-битного идентификатора сообщения и 2-битного поля четности.В дополнение к идентификатору идентификатор сообщения содержит дополнительную информацию о длине сообщения (2, 4 или 8 байтов данных). Подчиненное устройство, которому адресуется идентификатор сообщения, теперь передает свои байты данных (1-8 байтов данных), за которыми следует контрольная сумма. Версия протокола 1.3 использует классическую контрольную сумму, тогда как версия протокола 2. 0 использует улучшенную контрольную сумму.
0 использует улучшенную контрольную сумму.
Телеграмма LIN
Кадр, запускаемый по событию
Спецификация LIN 2.0 определяет инициируемый событием кадр в дополнение к стандартному кадру (безусловный кадр).Для этого несколько идентификаторов кадров определяются как событие, инициируемое в сети. Если ведущее устройство запрашивает такой кадр, соответствующее ведомое устройство начинает передавать данные. Когда это происходит, ведомое устройство также передает идентификатор кадра стандартного кадра в первом байте данных, который назначается этой информации. Если возникает коллизия или кадр, инициированный событием, не может быть правильно идентифицирован, информация будет передана индивидуально с использованием стандартного кадра.
UJA1065TW | CAN / LIN SBC | NXP
Базовая микросхема отказобезопасной системы (SBC) UJA1065 заменяет основные дискретные компоненты, которые являются общими в каждом электронном блоке управления (ЭБУ), на сеть контроллеров (CAN) и интерфейс локальной сети межсоединений (LIN). Отказоустойчивый SBC поддерживает все сетевые приложения, которые управляют различными периферийными устройствами питания и датчиков, используя высокоскоростную CAN в качестве основного сетевого интерфейса и LIN в качестве локальной вспомогательной шины. Отказоустойчивый SBC содержит следующие интегрированные устройства:
Отказоустойчивый SBC поддерживает все сетевые приложения, которые управляют различными периферийными устройствами питания и датчиков, используя высокоскоростную CAN в качестве основного сетевого интерфейса и LIN в качестве локальной вспомогательной шины. Отказоустойчивый SBC содержит следующие интегрированные устройства:
- Высокоскоростной трансивер CAN, совместимый и обратно совместимый с трансиверами CAN TJA1041 и TJA1041A, а также совместимый со стандартом ISO 11898-2 и стандартом ISO 11898-5 (в стадии подготовки) Приемопередатчик
- LIN, совместимый с LIN 2.0 и SAE J2602, и совместим с LIN 1.3
- Расширенный независимый сторожевой таймер
- Специальные регуляторы напряжения для микроконтроллера и трансивера CAN
- Последовательный периферийный интерфейс (полный дуплекс)
- Входной порт локального пробуждения
- Выходной порт запрета / аварийного выхода
В дополнение к преимуществам интеграции этих общих функций ЭБУ в одном пакете отказобезопасный SBC предлагает интеллектуальную комбинацию системных функций, таких как:
- Усовершенствованная концепция пониженного энергопотребления
- Безопасный и контролируемый запуск системы
- Продвинутое отказоустойчивое поведение системы, предотвращающее любую возможную тупиковую ситуацию
- Подробная отчетность о состоянии на уровне системы и подсистемы
UJA1065 разработан для использования в сочетании с микроконтроллером, который включает контроллер CAN. Отказоустойчивый SBC гарантирует, что микроконтроллер всегда запускается определенным образом. В аварийных ситуациях отказобезопасный SBC будет поддерживать функциональность микроконтроллера как можно дольше, чтобы обеспечить полный мониторинг и программно-управляемую операцию восстановления.
Отказоустойчивый SBC гарантирует, что микроконтроллер всегда запускается определенным образом. В аварийных ситуациях отказобезопасный SBC будет поддерживать функциональность микроконтроллера как можно дольше, чтобы обеспечить полный мониторинг и программно-управляемую операцию восстановления.
UJA1065 разработан для архитектур с одним источником питания 14 В и для архитектур с двумя источниками питания 14 В и 42 В.
PCAN-LIN Интерфейс CAN-to-LIN, высокоскоростной CAN — Phytools
Модуль PCAN-LIN позволяет пользователям общаться через CAN, LIN и последовательный интерфейс.Модуль поставляется в пластиковом корпусе. Прилагаемое микропрограммное обеспечение обеспечивает обмен данными между различными шинными системами, а конфигурационное программное обеспечение позволяет настраивать различные режимы работы. Например, при настройке в качестве ведущего устройства LIN, PCAN-LIN может запрашивать данные и отправлять входящие данные LIN на шину CAN и / или последовательный интерфейс. Скорость передачи по умолчанию для LIN составляет 19200 бит / с. Данные CAN направляются напрямую в LIN без смещения (смещение 0). Скорость передачи данных по умолчанию для CAN составляет 500 Кбит / с. Версия High Speed имеет максимальную скорость CAN 1 Мбит / с.
Скорость передачи по умолчанию для LIN составляет 19200 бит / с. Данные CAN направляются напрямую в LIN без смещения (смещение 0). Скорость передачи данных по умолчанию для CAN составляет 500 Кбит / с. Версия High Speed имеет максимальную скорость CAN 1 Мбит / с.- Отправка / получение кадров LIN 1.x и 2.0
- Стандартная скорость передачи данных установлена на 19200 бит / с для LIN и на 500 кбит / с для CAN
- Имеется электрическая развязка между RS-232 и CAN / LIN (максимум 1 кВ, опция)
- Доступно для использования в качестве подчиненного устройства LIN или главного / подчиненного устройства
- Шлюз общего назначения (или маршрутизатор при использовании функции Acceptance Code / Acceptance Mask) от:
- RS-232 к LIN (и обратно)
- CAN к LIN (и обратно)
- RS-232 в CAN (ограниченная полоса пропускания)
- Индивидуальные кадры LIN могут быть инициированы через CAN или RS-232
- Обработка определяемого пользователем списка LIN-ID (планировщик с ограниченным количеством записей, циклическая обработка, если требуется)
- Напряжение питания 8-18 В
- Дополнительная имитация подчиненных устройств LIN. Данные могут быть изменены через CAN-фреймы (прошивка должна быть изменена)
 Данные могут быть изменены через CAN-фреймы (прошивка должна быть изменена)
Данные могут быть изменены через CAN-фреймы (прошивка должна быть изменена)| Интерфейс (ы) | Последовательный: RS-232, макс. 57,600 кбит / с LIN: ISO 15765-2, LIN 1.x и LIN 2.x, макс. 19.200 кбит / с CAN: PCAN-LIN HS-CAN: ISO 11898-2 CAN-трансивер Philips PCA82C251, макс. 1 Мбит / с, CAN 2.0A (стандартный формат) и 2.0B (расширенный формат), CAN-контроллер Philips SJA1000 |
| Потребляемая мощность | напряжение: +8… +18 В постоянного тока (через контакт 1 штекерного разъема D-Sub) PCAN-LIN HS-CAN: макс.130 мА |
| Размеры | 92 x 44 x 22 мм |
| Масса | 47 г |
| Рабочая температура | -40… +85 ° C (-40… +185 ° F) |
| Температура хранения | -40… +100 ° C (-40… +212 ° F) |
| Относительная влажность | от 15% до 90% (без конденсации) |
| Директивы по электромагнитной совместимости | EN 61000-6-3: 2001 EN 61000-6-1: 2001 EN 61000-6-4: 2001 EN 61000-6-2: 2001 Директива ЕС 89/336 / EEC |
| Сертификаты | CE |
LIN, CAN, FlexRay, шлюз, диагностика
% PDF-1. 5
%
1 0 obj
>
endobj
2 0 obj
> поток
application / pdf
5
%
1 0 obj
>
endobj
2 0 obj
> поток
application / pdf
Линия по новому протоколу проводки для автомобилей LIN
Дэн Батлер
Главный инженер по приложениям
Microchip Technology Inc.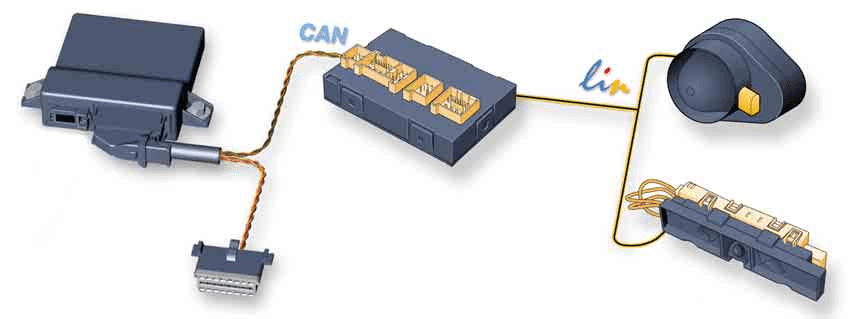
Чандлер, Аризона.
Под редакцией Майлза Будимира
В основе новой автомобильной шины LIN лежат узлы, управляемые микропроцессором. Они используют такие микросхемы, как трансивер PICmicro LIN от Microchip Technology. |
Шина LIN может подключать до 16 подчиненных узлов к одному главному контроллеру, а подчиненные узлы могут находиться на расстоянии не более 40 метров от главного контроллера. |
Сеть контроллеров (CAN) возникла как стандартная высокоскоростная шина или сеть для соединения электронных систем в современных легковых, грузовых и других транспортных средствах. Это быстро, с большой пропускной способностью, но дорого. И это перебор для некоторых автомобильных систем, особенно механических систем, управляемых человеком, таких как дверные замки и окна, дворники, люк на крыше и климат-контроль. Эти инициированные человеком события измеряются в миллисекундах, а не в микросекундах и наносекундах других автомобильных электронных устройств. Следовательно, они могут использовать более медленные и менее дорогие технологии.
Следовательно, они могут использовать более медленные и менее дорогие технологии.
Именно здесь на помощь приходит новый протокол локальной межсетевой связи (LIN). LIN был разработан как недорогая, низкоскоростная сеть на короткие расстояния для событий в «человеческом» или «механическом» времени. Эта спецификация разработана европейскими автопроизводителями, включая Audi AG, BMW AG, DaimlerChrysler AG, Volkswagen AG и VolvoCar Corp., а также Motorola Inc. и Volcano Communications Technologies AB.
Основы работы с сетью
В автомобиле с цифровым подключением команды по LIN передаются по последовательной шине, а не по выделенным проводам.Каждый узел на шине содержит недорогой микроконтроллер, а каждый LIN имеет один главный узел. Главный и подчиненный узлы идентичны, за исключением того, что главные узлы поддерживают синхронизацию и трафик для всех узлов в LIN. Это обеспечивает детерминированную синхронизацию и устраняет накладные расходы на шину, связанные с устройствами, борющимися за использование сети. LIN работает от аккумуляторной батареи транспортного средства (от 8 до 18 В), поэтому всего три провода — питание, земля и сигнал — соединяют каждый узел. Специальная микросхема приемопередатчика LIN изолирует контроллер на каждом узле от шины.Помимо обеспечения гальванической развязки, эти микросхемы также ограничивают время нарастания импульсов для уменьшения электромагнитных и радиопомех.
LIN работает от аккумуляторной батареи транспортного средства (от 8 до 18 В), поэтому всего три провода — питание, земля и сигнал — соединяют каждый узел. Специальная микросхема приемопередатчика LIN изолирует контроллер на каждом узле от шины.Помимо обеспечения гальванической развязки, эти микросхемы также ограничивают время нарастания импульсов для уменьшения электромагнитных и радиопомех.
Длина шины ограничена 40 метрами, чтобы ограничить задержки распространения и общую емкость. Соединения главного узла подтягиваются через резистор 1 кОм, в то время как ведомые устройства имеют собственные индивидуальные подтяжки 30 кОм (номинал). Диод предотвращает обратное попадание шины в линию питания.
Шина высоко плавает при простое, подтягиваясь через слабые подтягивания в каждом узле.О наличии нулей сигнализирует опускание шины на низкий уровень. Состояние «1» существует, когда все узлы позволяют шине «плавать», состояние «0», когда какой-либо узел переводит шину в низкий уровень.
Чтобы шина была экономичной, в каждом узле нет дорогих кварцевых генераторов. Вместо этого недорогие RC-генераторы генерируют тактовые сигналы. Преамбула автобода, включенная в каждое сообщение, устраняет необходимость в кристаллах и их сверхточном времени. Подчиненные микроконтроллеры повторно калибруют битовую синхронизацию в начале каждого сообщения и соответствуют текущей скорости ведущего.Таким образом, каждый узел синхронизируется с ведущим, хотя RC-генераторы могут дрейфовать с разной скоростью.
Типичные сети LIN
Типичный узел LIN может состоять из панели переключателей, встроенной в дверь. Он будет сканироваться мастером шины, который получает команды, инициированные человеком, активирующим переключатели, управляющие дверными замками, окнами и зеркалами. Этот LIN подключается к шине CAN, проходящей через автомобиль. Главный узел сканирует команды с частотой 20 Гц и отправляет их соответствующим узлам для выполнения действий.Каждый узел может полностью содержаться в одной двери. Команды от узла внутри узла двери водителя могут быть отправлены узлам в других дверях, например, для запирания и отпирания или для открытия или закрытия окна. Эти команды будут маршрутизироваться по шине CAN. Узел интерфейса в соответствующей двери будет считывать команды с шины CAN и активировать запрошенные функции через свою шину LIN. Все главные узлы сканируют панель управления каждые 50 мсек и передают команды на шину, когда видят замкнутый переключатель.Ограничение скорости сканирования устраняет необходимость дребезга переключателей.
Команды от узла внутри узла двери водителя могут быть отправлены узлам в других дверях, например, для запирания и отпирания или для открытия или закрытия окна. Эти команды будут маршрутизироваться по шине CAN. Узел интерфейса в соответствующей двери будет считывать команды с шины CAN и активировать запрошенные функции через свою шину LIN. Все главные узлы сканируют панель управления каждые 50 мсек и передают команды на шину, когда видят замкнутый переключатель.Ограничение скорости сканирования устраняет необходимость дребезга переключателей.
Дверные замки — это простые устройства с двумя состояниями: заперто или отперто. Когда узел блокировки получает команду, он проверяет текущее состояние блокировки, а затем переводит блокировку в желаемое состояние.
Узлы других типов имеют более двух состояний. Окна, например, могут быть в любом положении от полностью закрытого до полностью открытого. Точно так же зеркала могут быть установлены в любом месте от крайнего левого угла до полного правого и от полного вверх до полного вниз. В этих случаях панель управления отправляет сообщения, пока нажата кнопка регулировки окна или зеркала. Оконные и зеркальные узлы затем приводят двигатели в нужном направлении. Они остаются под напряжением до тех пор, пока либо не перестанут получать команды, либо не остановятся.
В этих случаях панель управления отправляет сообщения, пока нажата кнопка регулировки окна или зеркала. Оконные и зеркальные узлы затем приводят двигатели в нужном направлении. Они остаются под напряжением до тех пор, пока либо не перестанут получать команды, либо не остановятся.
Более сложный LIN может включать пять панелей управления, по одной в каждой двери и еще одну в центральной консоли. Они могли управлять четырьмя окнами и дверными замками, двумя зеркалами, люком в крыше, задним люком, задним стеклоочистителем и обогревателем.Как и в более простой системе, главный узел будет сканировать узел панели управления и размещать команды в LIN, а затем переходить к следующему узлу панели управления. Между тем подчиненные узлы прослушивают предназначенные для них команды и реагируют соответствующим образом.
LIN и CAN не конкурируют, а скорее дополняют друг друга.
Но необходимо добавить интерфейс между LIN и CAN. Этот мост может состоять из процессора (PIC16C432) в сочетании с автономным трансивером CAN (MCP2510). Эти два чипа следят за обеими шинами и обмениваются данными. Чтобы увидеть, как может происходить этот обмен, рассмотрите информацию о температуре, необходимую в нескольких местах в автомобиле. Датчики температуры в помещении и на улице, встроенные в LIN двери, сначала отправят данные в главный узел двери. Главный узел, в свою очередь, подключит его к шине CAN. Оттуда зеркало заднего вида и проекционный дисплей собирают данные для отображения, а система экологического контроля использует эти данные для активации климат-контроля и решеток дефростера.
Эти два чипа следят за обеими шинами и обмениваются данными. Чтобы увидеть, как может происходить этот обмен, рассмотрите информацию о температуре, необходимую в нескольких местах в автомобиле. Датчики температуры в помещении и на улице, встроенные в LIN двери, сначала отправят данные в главный узел двери. Главный узел, в свою очередь, подключит его к шине CAN. Оттуда зеркало заднего вида и проекционный дисплей собирают данные для отображения, а система экологического контроля использует эти данные для активации климат-контроля и решеток дефростера.
Протокол сообщений LIN
Сообщения LIN начинаются с прерывания синхронизации, байта синхронизации и байта идентификатора. Разрыв синхронизации обычно имеет длину 13 бит и предупреждает каждый подчиненный узел о предстоящем сообщении. Байт синхронизации, восемь битов с чередованием единиц и нулей, помогает ведомым узлам определять текущую битовую синхронизацию.
Байт идентификатора служит нескольким целям. Он сигнализирует узлу, чтобы он отправил свое сообщение на шину, сообщая остальным узлам, какие данные следует за ним. Байт идентификатора разделен на три поля.Четыре бита кодируют идентификатор сообщения, который может быть от 0 до 15. Два бита кодируют поле длины или количество отправляемых данных. Это может быть 2, 4 или 8 байтов данных, не считая байта контрольной суммы. Последние два бита обеспечивают защиту с проверкой четности для байта идентификатора.
Байт идентификатора разделен на три поля.Четыре бита кодируют идентификатор сообщения, который может быть от 0 до 15. Два бита кодируют поле длины или количество отправляемых данных. Это может быть 2, 4 или 8 байтов данных, не считая байта контрольной суммы. Последние два бита обеспечивают защиту с проверкой четности для байта идентификатора.
Пространство межкадрового ответа дает узлу время, чтобы распознать, что он должен начать передачу данных. Время, отведенное для отправки данных, кодируется в байте идентификатора. Узел, распознающий байт идентификатора, берет на себя шину для передачи данных и контрольной суммы данных.В большинстве случаев пространство межкадрового отклика дает достаточно времени, чтобы собрать свежие данные для отчета, что упрощает программирование.
LIN включает три уровня проверки ошибок. Каждый бит проверяется при передаче. Когда узел передает каждый бит, он контролирует шину, чтобы убедиться, что переданный бит действительно идет по шине. Нули являются доминирующими, так что это действительно только для передачи, для которых шина должна плавать. В случае ошибки узел прекращает передачу и записывает ошибку.
В случае ошибки узел прекращает передачу и записывает ошибку.
Байт идентификатора защищен проверкой четности двумя битами четности, P0 и P1. И, наконец, этап данных включает дополнительный байт контрольной суммы. При обнаружении ошибки транзакция игнорируется, но ошибка может регистрироваться для диагностических целей.
Обмен данными команд, управления и состояния хорошо вписывается в низкоскоростной спектр, для которого был разработан LIN. Производители бытовой техники проявляют интерес к LIN для связи между панелями переключателей, датчиками, двигателями и дисплеями.Как и автопроизводители, они хотят сократить количество проводов, повысить надежность и все функции, которые делают возможными цифровые технологии. Забегая вперед, можно сказать, что протокол LIN может появиться в некоторых интересных приложениях, сочетающих технологию шины LIN с недорогими радиомодемами.
.