Как отключить ЭРА ГЛОНАСС на машине?
Парадоксальной вопрос о том, как отключить ЭРА ГЛОНАСС на машине, задают многие владельцы автомобилей. Мотивация у них может быть разной, но факт остается фактом: штатная возможность выключения системы в конструкции не предусмотрена.
Но при должной технической смекалке разобраться, как отключить ЭРА ГЛОНАСС на машине, вполне реально. В статье мы приведем несколько рекомендаций, а также расскажем о том, почему без крайней необходимости делать этого не стоит.
Почему пользователи хотят отключить устройство экстренной связи
Отключение ЭРА ГЛОНАСС в автомобиле — функция, которая не предусмотрена конструкцией системы. И все же многие владельцы машин хотят иметь такую возможность. Мотивируют они это по-разному:
- Во-первых, во многих моделях автомобилей кнопка для связи с экстренными службами на приборной панели расположена таким образом, что при неосторожном движении ее можно нажать.

- Во-вторых, некоторым водителям не нравится присутствие в машине прибора, который постоянно отслеживает их перемещение. И хоть руководители проекта ЭРА ГЛОНАСС опровергают все утверждения об использовании этих данных, сам факт фиксации координат машины в системе спутниковой навигации для кого-то оказывается неприемлемым.

Именно эти соображения и подталкивают водителей к поискам способа деактивации терминала.
Почему отключение ЭРА ГЛОНАСС не рекомендуется?
Отключать систему спутникового позиционирования и связи со спасательными службами не стоит по нескольким причинам. Самая очевидная — невозможность получения помощи в тот момент, когда она будет нужна, например, при аварии на удаленном участке трассы.
Следующая причина касается сложностей с оформлением документов. Если при очередном техосмотре обнаружат неисправность модуля ЭРА ГЛОНАСС, или его отсутствие (если вы его удалите), то диагностическая карта, нужная для оформления полиса ОСАГО, выдана не будет. Наконец, возможны и более серьезные проблемы. Если автомобиль подает в аварию, тем более с человеческими жертвами, то отключение ЭРА ГЛОНАСС может расцениваться как отягчающее обстоятельство. Это особенно актуально для техники, задействованной в пассажирских перевозках.
Наконец, возможны и более серьезные проблемы. Если автомобиль подает в аварию, тем более с человеческими жертвами, то отключение ЭРА ГЛОНАСС может расцениваться как отягчающее обстоятельство. Это особенно актуально для техники, задействованной в пассажирских перевозках.
Зачем нужна и как работает ЭРА ГЛОНАСС?
ЭРА ГЛОНАСС – это система, которая устанавливается на автомобиль и позволяет при аварии послать сигнал на пульт диспетчера, откуда информации о ДТП поступает напрямую к спасательным службам:
- Активируется система либо по сигналу от датчиков (они фиксируют удар/переворот авто), либо при нажатии кнопки в салоне.
- При срабатывании модуль ГЛОНАСС определяет координаты машины по спутниковой сети, после чего информация о координатах и состоянии машины передается по сети GSM в диспетчерский пункт.
- Диспетчер предпринимает попытку связаться с водителем или пассажирами через переговорное устройство. Если вызов не был отменен, то на место аварии направляется Скорая Помощь, ДПС ГИБДД, МЧС или другие службы.

Система позволяет решить две задачи: минимизировать временной промежуток между ДТП и прибытием спасателей и передать спасательным службам полную и объективную информацию о месте аварии и о самой машине. Некоторые модели систем формируют достаточно обширный информационный пакет, в котором содержатся данные вплоть до количества пассажиров на момент срабатывания «тревожной кнопки» (рассчитывается по числу активированных ремней безопасности).
Установка, подключение и способы отключения
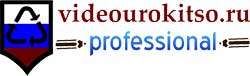
При установке в заводских условиях терминал ЭРА ГЛОНАСС встраивается в конструкцию машины. Производитель при этом устанавливает несколько датчиков, фиксирующих боковые/фронтальные удары и перевороты автомобиля. Если ЭРА ГЛОНАСС ставится на подержанное авто (например, при его возе в РФ из стран ЕС), то датчики не монтируются. В этом случае ограничиваются установкой терминала, подключением его к бортовым сетям и закреплением на приборной панели кнопки «SOS», позволяющей активировать систему в ручном режиме.
- Установка GSM-глушителя (подключается к прикуривателю). Система будет определять координаты, но при этом не будет пересылать данные и связываться с диспетчерским пунктом. Основной минус – пользоваться мобильным телефоном в салоне тоже не получится.
- Отключение антенны. На задней панели вынимаем шнур из разъема SAT/GPS (делать это лучше при выключенном зажигании). Здесь ситуация будет обратной: сигнал тревоги может уйти, но координаты не будут зафиксированы.
- Обесточивание блока питания. При этом терминал отключается от бортовой сети: около 3 дней он еще работает от аккумулятора, после чего выключится полностью.
Самым радикальным способом будет полный демонтаж устройства. Но почему это делать не стоит, мы уже рассказали.
Где устанавливать ЭРА ГЛОНАСС?
Вне зависимости от того, планируете ли вы использовать систему экстренного информирования, или хотите в будущем ее отключить, в некоторых ситуациях установка ЭРА ГЛОНАСС оказывается обязательной.
Демонтаж ГЛОНАСС в Ставрополе и Ставропольском крае
А стоит ли?
ЗАКАЗАТЬ ДЕМОНТАЖ
СТОИМОСТЬ ДЕМОНТАЖА
Предназначение ЭРА-ГЛОНАСС и её возможностиОсновной функцией системы ЭРА-ГЛОНАСС является возможность быстрого вызова оперативных служб в экстренных ситуациях.
Данная система включает в себя такие элементы, как:
- навигационный терминал;
- тревожная кнопка SOS для вызоза оперативных служб;
- динамик;
- микрофон.
Именно такой набор компонентов вызывает вопросы у некоторых автовладельцев. Многим не ясно, каким образом ЭРА-ГЛОНАСС интегрируется в электронную систему транспортного средства. Из этого вытекают подозрения, что устройство может позволить третьим лицам влиять на работу автомобиля извне.
Кроме того некоторые автомобилисты пришли к выводу, что если ГЛОНАСС соединяется с электроникой с помощью CAN-шины, то автомобильные электронные блоки управления находятся в потенциальной опасности, а именно могут подвергаться воздействию извне. По такой логике, к примеру, третье лицо способно запросто остановить работу двигателя, а это уже несет угрозу жизни человека. Являются ли обоснованными эти теоретические догадки, и как же обстоит дело на практике?
Являются ли обоснованными эти теоретические догадки, и как же обстоит дело на практике?
Уровень безопасности вашего автомобиля зависит от того, где именно вы устанавливаете кнопку ЭРА-ГЛОННАС.
Так, если после ввоза машины на территорию РФ система монтируется в специализированной мастерской, то она готова к выполнению своей основной задачи — осуществлять тревожный вызов в экстренных ситуациях. И если вы опасаетесь постороннего воздействия на работу вашего автомобиля, то вы всегда можете обратиться в нашу компанию для предотвращения любых видов потенциальной угрозы. Наши специалисты готовы технически обезопасить ваш автомобиль от несанкционированного вмешательства, даже если транспортное средство имеет сложное электронное оборудование.
Если же ЭРА-ГЛОНАСС была установлена за рубежом или на сборочном заводе уже в самой России, то ваши опасения могут стать оправданными. В частности это касается автомобилей класса люкс со сложным электрооборудованием.
Если вышеперечисленные способы защиты вашего авто Вам не подходят, то в таком случае остается лишь произвести демонтаж ЭРА-ГЛОНАСС.
Как снять ГЛОНАСС?Если вы решили снять систему с автомобиля, рекомендуем не делать этого самостоятельно, а обратиться в автосервис. Одно неправильное ваше действие, и электрооборудование получит серьезные повреждения, устранение которых сегодня обходится в пятизначные, а то и в шестизначные суммы.
Чтобы не терять свое время и деньги, обращайтесь к нашим профессионалам, которые имеют огромный опыт работы с автомобилями разных моделей и марок.
ЗАКАЗАТЬ ДЕМОНТАЖ
СТОИМОСТЬ ДЕМОНТАЖА
Как отключить ЭРА ГЛОНАСС на Лада Веста
Эра Глонасс на Лада Веста
Трудно представить новый автомобиль, у которого не имеется современный электронного оборудования. Все комплектации Лада Веста имеют встроенную систему Эра Глонасс, позволяющую определить, когда и где произошла авария. Установленная заводом-изготовителем система позволяет определять координаты, где находится машина, скорость движения, количество пристегнутых пассажиров, серьезность произошедшей аварии.
Описание и назначение комплекса
Водитель должен знать, как работает Эра Глонасс на Lada Vesta. В автоматическом режиме передает всю информацию об автомобиле:
- Скорость движения во время происшествия;
- Номерной знак машины;
- VIN, тип топлива, цвет, автомобиля;
- Значение перегрузки в момент столкновения.
Объем передаваемой информации незначительный и составляет 140 байт, а это значит, что информация может быть передана и при неустойчивой связи.
На Лада Веста предусмотрен режим ручной связи с диспетчером. Для того, чтобы осуществить вызов, необходимо:
- нажать и удерживать кнопку SOS 2 секунды;
- дождаться ответа оператора;
- сообщить о возникшей проблеме;
- получить ответ или помощь.
После получения сигнала, диспетчер пытается связаться с водителем. Если автолюбитель не отвечает, моментально передаются координаты в службу 112, 02, 03 и аварийные бригады выезжают на место.
Система предназначена для оперативной информации о произошедшей нештатной ситуации с Ладой или пассажирами. Оказания помощи пострадавшим, предотвращение угона или разбойного нападения на людей.
Отключение Эры Глонасс на Весте
Отключение Глонасс в Лада Веста лишает водителя и пассажиров оперативного вмешательства экстренных служб в нештатные ситуации на дороге. Система в нашей стране практически работает в тестовом режиме и поэтому многие автовладельцы задаются вопросом, как отключить Эра Глонасс на Лада Веста.
Для того чтобы отключить на Весте комплекс, достаточно отсоединить разъем питания блока, т.е. обесточить, и подождать 72 часа. За это время разрядится резервный аккумулятор, и блок перестанет работать. Если необходимо выключить Эра Глонасс на время, стоит приобрести «глушилку» Китайского производства, которая включается в прикуриватель и блокирует сигналы спутников, однако оперативная связь с оператором остается.
В случаи аварии Лады Весты система срабатывать будет и сигнал к диспетчеру поступит, но координаты указаны будут неверные. А это значит, что аварийные службы будут высланы по ложным координатам нахождения автомобиля.
ЭРА-ГЛОНАСС на автомобилях LADA — Официальный сайт LADA
ЭРА-ГЛОНАСС на автомобилях LADA — Официальный сайт LADAВыберите город
МоскваСанкт-ПетербургТольятти, Самарская областьУфа, Республика БашкортостанКраснодар, Краснодарский КрайЕкатеринбург, Свердловская областьСамара, Самарская областьКазань, Республика ТатарстанНижний Новгород, Нижегородская областьЧелябинск, Челябинская область
LADA и система «ЭРА-ГЛОНАСС»: безопасность под контролем
Мы повышаем требования к безопасности наших клиентов — наши автомобили оборудованы системой «ЭРА-ГЛОНАСС»
Система работает
в двух режимах
Ручной режим
При возникновении аварии или другого происшествия Вы можете самостоятельно связаться с оператором, нажав на кнопку, и вызвать помощь.
Автоматический режим
В случае серьезной аварии (например, при возгорании автомобиля, срабатывании подушек безопасности) экстренный вызов производится автоматически.
Система передает детали происшествия в информационный центр
Координаты и время происшествия
VIN номер Вашего
автомобиля
Операторы контактного центра получают все данные
и передают в службы экстренного реагирования,
исключая ложные вызовы
На место происшествия выезжают инспекторы ГИБДД, скорая
помощь, спасатели или пожарные службы в зависимости от обстоятельств
Выберите автомобиль LADA с системой ЭРА-ГЛОНАСС
Для улучшения работы сайта и его взаимодействия с пользователями мы используем файлы cookie. Продолжая работу с сайтом, Вы разрешаете использование cookie-файлов. Вы всегда можете отключить файлы cookie в настройках Вашего браузера.
Вы всегда можете отключить файлы cookie в настройках Вашего браузера.
Принять
СИСТЕМА ЭРА-ГЛОНАСС | INFINITI ЦС-Моторс – официальный дилер Infiniti в городе Екатеринбург
Если модуль управления подушками безопасности обнаружил фронтальное или боковое столкновение или опрокидывание автомобиля, то система автоматически посылает экстренный вызов в контактный центр оператора. Одновременно передается информация об автомобиле (место нахождения автомобиля, скорость и направление движения). По получении экстренного сообщения об аварии оператор контактного центра попытается переговорить с пассажирами автомобиля.
ПРИМЕЧАНИЕ
- При экстренном вызове уровень громкости голоса оператора не регулируется.
- При экстренном вызове звук аудиосистемы будет отключен.
По умолчанию система ЭРА-ГЛОНАСС постоянно находится в дежурном режиме. В случае аварии автомобильная система экстренного вызова сообщает в контактный центр следующую информацию:
- идентификационный номер автомобиля (VIN)
- тип двигателя
- отметку времени события (время, когда произошла авария)
- расположение автомобиля, скорость и направление движения автомобиля.

Эти данные будут удалены, как только они станут не нужны.
ВНИМАНИЕ
- Экстренный вызов выполняется только в том случае, если при аварии сработала система подушек безопасности автомобиля.
- За соединение с оператором службы экстренного реагирования при авариях отвечает компания «ГЛОНАСС», в чьем ведении находится контактный центр для экстренных вызовов.
- Провайдер услуг связи GSM, обеспечивающий связь между автомобилем и контактным центром для экстренных вызовов, назначается и контролируется компанией «ГЛОНАСС» (в зону ответственности провайдера услуг связи не входит автомобильная система экстренного вызова).
- В течение первой минуты после получения вызова оператор контактного центра для экстренных вызовов должен определить, является ли вызов действительно экстренным. Если оператор определит вызов, как ложный, он прерывает вызов и не будет предпринимать дальнейших попыток связаться с автомобилем. Это не помешает пассажиру (пассажирам) автомобиля сделать следующий экстренный вызов в ручном режиме.

Функция экстренного вызова может не действовать в следующих условиях:
- автомобиль находится вне зоны покрытия сотовой связью;
- автомобиль находится в зоне плохого приема сигнала: в туннеле, на подземной парковке, между зданиями или в горной местности;
- телематический блок управления (TCU) или другие системы автомобиля не работают надлежащим образом;
- провайдер услуг сотовой связи в зоне расположения автомобиля не уполномочен компанией «ГЛОНАСС» обслуживать экстренные вызовы;
- линия связи с контактным центром компании ГЛОНАСС занята.
В Москве реализовано постоянное информационное взаимодействие ГАИС «ЭРА-ГЛОНАСС» и «Системы-112»
21 апреля 2021 года вступил в силу приказ Минкомсвязи РФ об использовании единого номера «112» на территории Москвы. Cтолица России стала шестидесятым регионом, где обеспечено постоянное информационное взаимодействие ГАИС «ЭРА-ГЛОНАСС» с «Системой-112». Ожидается, что к концу текущего года количество таких субъектов РФ превысит 70.
Ожидается, что к концу текущего года количество таких субъектов РФ превысит 70.
Москва является крупнейшим транспортным центром России. Количество зарегистрированных в Москве легковых автомобилей приближается к 4 млн, а парк столичной грузовой техники насчитывает более 160 тыс. машин (по данным агентства «Автостат» на начало 2021 г.). Многие маршруты междугородных перевозок также пролегают через мегаполис. В связи с этим обеспечение дорожной безопасности в Москве посредством реализации постоянного автоматизированного информационного взаимодействия ГАИС «ЭРА-ГЛОНАСС» с «Системой-112» является стратегически важной задачей для всей страны.
В режиме тестовой эксплуатации столичная «Система 112» работает уже давно. Важным итогом 2020 года стала ее интеграция с информационными системами экстренных оперативных служб, выполнение всех рекомендаций государственной приемочной комиссии и финальная проверка готовности «Системы-112» Москвы к вводу в промышленную эксплуатацию.
Количество вызовов из Москвы, обрабатываемых контакт-центром ГАИС «ЭРА-ГЛОНАСС», значительно превосходит число обращений из других регионов. В период наиболее высокой нагрузки на систему «ЭРА-ГЛОНАСС» (2020-21 гг.) доля истинных вызовов, поступивших с территории Москвы, составила 14,6%, а из Московской области – 11,3% от общего количества по стране. При этом на Санкт-Петербург приходится 7,7% истинных вызовов, на Ленинградскую и Челябинскую области, Краснодарский край и Республику Башкортостан – по 2,4-3,5%, а на каждый из других субъектов РФ – порядка 1%.
В период наиболее высокой нагрузки на систему «ЭРА-ГЛОНАСС» (2020-21 гг.) доля истинных вызовов, поступивших с территории Москвы, составила 14,6%, а из Московской области – 11,3% от общего количества по стране. При этом на Санкт-Петербург приходится 7,7% истинных вызовов, на Ленинградскую и Челябинскую области, Краснодарский край и Республику Башкортостан – по 2,4-3,5%, а на каждый из других субъектов РФ – порядка 1%.
Сопряжение и начало автоматизированного взаимодействия ГАИС «ЭРА-ГЛОНАСС» и столичной «Системы-112» существенно ускорит передачу в экстренные службы Москвы информации о происшествиях на дорогах. Быстрое прибытие на место аварии ГИБДД, МЧС и скорых особенно важно при серьезных ДТП: это позволяет соблюсти правило «золотого часа» – времени, когда меры по оказанию медицинской помощи наиболее продуктивны для сохранения здоровья и жизни пострадавших.
Также в условиях мегаполиса ускорение реагирования на аварии имеет большое значение для снижения количества пробок из-за ДТП. Оперативный приезд экстренных служб, в т. ч. на высокоскоростные магистрали, позволит быстро убрать с проезжей части автомобили участников происшествий, снизив тем самым «эффект домино».
Оперативный приезд экстренных служб, в т. ч. на высокоскоростные магистрали, позволит быстро убрать с проезжей части автомобили участников происшествий, снизив тем самым «эффект домино».
Система «ЭРА-ГЛОНАСС» работает на всей территории Российской Федерации свыше шести лет – с 1 января 2015 г. ГАИС «ЭРА-ГЛОНАСС» полностью готова к интеграции с региональными «Системами-112», необходим только их ввод в промышленную эксплуатацию в каждом отдельном субъекте РФ.
В Москве реализовано постоянное информационное взаимодействие ГАИС «ЭРА-ГЛОНАСС» и «Системы-112»
21 апреля 2021 года вступил в силу приказ Минкомсвязи РФ об использовании единого номера «112» на территории Москвы. Cтолица России стала шестидесятым регионом, где обеспечено постоянное информационное взаимодействие ГАИС «ЭРА-ГЛОНАСС» с «Системой-112». Ожидается, что к концу текущего года количество таких субъектов РФ превысит 70.
Москва является крупнейшим транспортным центром России. Количество зарегистрированных в Москве легковых автомобилей приближается к 4 млн, а парк столичной грузовой техники насчитывает более 160 тыс. машин (по данным агентства «Автостат» на начало 2021 г.). Многие маршруты междугородных перевозок также пролегают через мегаполис. В связи с этим обеспечение дорожной безопасности в Москве посредством реализации постоянного автоматизированного информационного взаимодействия ГАИС «ЭРА-ГЛОНАСС» с «Системой-112» является стратегически важной задачей для всей страны.
машин (по данным агентства «Автостат» на начало 2021 г.). Многие маршруты междугородных перевозок также пролегают через мегаполис. В связи с этим обеспечение дорожной безопасности в Москве посредством реализации постоянного автоматизированного информационного взаимодействия ГАИС «ЭРА-ГЛОНАСС» с «Системой-112» является стратегически важной задачей для всей страны.
В режиме тестовой эксплуатации столичная «Система 112» работает уже давно. Важным итогом 2020 года стала ее интеграция с информационными системами экстренных оперативных служб, выполнение всех рекомендаций государственной приемочной комиссии и финальная проверка готовности «Системы-112» Москвы к вводу в промышленную эксплуатацию.
Количество вызовов из Москвы, обрабатываемых контакт-центром ГАИС «ЭРА-ГЛОНАСС», значительно превосходит число обращений из других регионов. В период наиболее высокой нагрузки на систему «ЭРА-ГЛОНАСС» (2020-21 гг.) доля истинных вызовов, поступивших с территории Москвы, составила 14,6%, а из Московской области – 11,3% от общего количества по стране. При этом на Санкт-Петербург приходится 7,7% истинных вызовов, на Ленинградскую и Челябинскую области, Краснодарский край и Республику Башкортостан – по 2,4-3,5%, а на каждый из других субъектов РФ – порядка 1%.
При этом на Санкт-Петербург приходится 7,7% истинных вызовов, на Ленинградскую и Челябинскую области, Краснодарский край и Республику Башкортостан – по 2,4-3,5%, а на каждый из других субъектов РФ – порядка 1%.
Сопряжение и начало автоматизированного взаимодействия ГАИС «ЭРА-ГЛОНАСС» и столичной «Системы-112» существенно ускорит передачу в экстренные службы Москвы информации о происшествиях на дорогах. Быстрое прибытие на место аварии ГИБДД, МЧС и скорых особенно важно при серьезных ДТП: это позволяет соблюсти правило «золотого часа» – времени, когда меры по оказанию медицинской помощи наиболее продуктивны для сохранения здоровья и жизни пострадавших.
Также в условиях мегаполиса ускорение реагирования на аварии имеет большое значение для снижения количества пробок из-за ДТП. Оперативный приезд экстренных служб, в т. ч. на высокоскоростные магистрали, позволит быстро убрать с проезжей части автомобили участников происшествий, снизив тем самым «эффект домино».
Напомним, что система «ЭРА-ГЛОНАСС» работает на всей территории Российской Федерации свыше шести лет – с 1 января 2015 г. ГАИС «ЭРА-ГЛОНАСС» полностью готова к интеграции с региональными «Системами-112», необходим только их ввод в промышленную эксплуатацию в каждом отдельном субъекте РФ.
eCall / ЭРА-ГЛОНАСС | u-blox
eCall и ЭРА-ГЛОНАСС — это европейские и российские инициативы по объединению мобильной связи и спутникового позиционирования для оказания быстрой помощи автомобилистам в случае столкновения.
Системы, первая из которых основана на GPS, а вторая на ГЛОНАСС, отслеживают автомобильные датчики на предмет таких событий, как срабатывание подушки безопасности, чтобы автоматически передавать информацию о местоположении и вызывать помощь через экстренную сотовую службу. Мотивация для обеих систем — снижение последствий дорожно-транспортных происшествий в Европе и России.
При активации бортовые системы автоматически инициируют экстренный вызов, передавая голос и данные (включая данные о местоположении) непосредственно в ближайший пункт ответа общественной безопасности, чтобы определить, следует ли отправлять службы спасения в известное место.
Основными функциями обеих систем является встроенный компьютер, который непрерывно контролирует датчики столкновения и спутниковый приемник позиционирования, чтобы инициировать автоматические данные и полнодуплексный голосовой вызов через выделенный беспроводной модем (например,грамм. GSM, UMTS) в случае аварии. Возможность внутриполосного модема, способность передавать данные по голосовому каналу, является ключевым требованием для обеих систем. Цель состоит в том, чтобы оснастить все автомобили в ЕС и России специализированным оборудованием либо в качестве первого блока в новых автомобилях, либо установить в уже существующие автомобили (послепродажные устройства).
В связи с приближающимся развертыванием ЭРА-ГЛОНАСС и eCall разработка автомобильных терминалов идет полным ходом. Правильный выбор компонентов имеет большое влияние на время вывода продукта на рынок.Важными факторами, которые следует учитывать, являются ноу-хау поставщика и способность поддерживать требования к проектированию подсистем GPS / ГЛОНАСС и GSM / UMTS, всесторонняя поддержка программного обеспечения, сертификация беспроводного модема, прямая совместимость с технологиями будущего, а также способность поставлять высококачественные автомобильные компоненты в больших объемах. u ‑ blox предоставляет компоненты для беспроводной связи и приемника GPS / ГЛОНАСС как для eCall, так и для ЭРА-ГЛОНАСС, которые соответствуют этим критериям. Для получения более подробной информации о решениях u ‑ blox и тестовой среде для eCall и ЭРА-ГЛОНАСС свяжитесь с u ‑ blox.
Дополнительное чтение:
Технический документ: «Европейский eCall будет развернут в 2015 году» (английский PDF, корейский PDF)
2-страничный флаер: eCall / ERA-GLONASS: решения u ‑ blox для экстренного реагирования
Примечание по применению: eCall / ERA Внедрение ГЛОНАСС в беспроводных модулях u ‑ blox
Технический документ: комплексный подход u ‑ blox к мульти-GNSS-позиционированию
ГЛОНАСС | НовАтель
ГЛОНАСС (Глобальная навигационная спутниковая система, Россия)
ГЛОНАСС была разработана Советским Союзом как экспериментальная система военной связи в 1970-х годах.Когда закончилась «холодная война», Советский Союз признал, что ГЛОНАСС имеет коммерческое применение, благодаря способности системы передавать погодные радиопередачи, данные связи, навигации и разведки.
Первый спутник ГЛОНАСС был запущен в 1982 году, и система была объявлена полностью работоспособной в 1993 году. После периода ухудшения характеристик ГЛОНАСС Россия взяла на себя обязательство довести систему до требуемого минимума в 18 активных спутников. В настоящее время ГЛОНАСС имеет 24 спутника в группировке.
спутника ГЛОНАСС эволюционировали с момента запуска первых. Последнее поколение ГЛОНАСС-М показано на рис. 30. . готовится к запуску.
Проектирование системы ГЛОНАСС
Созвездие ГЛОНАСС обеспечивает видимость различного количества спутников в зависимости от вашего местоположения. Наличие как минимум четырех спутников в поле зрения позволяет приемнику ГЛОНАСС вычислять свое положение в трех измерениях и синхронизировать с системным временем.
Космический сегмент ГЛОНАСС
Космический сегмент ГЛОНАСС представлен в таблице 4 .
Таблица 4: Спутниковая группировка ГЛОНАСС
| Спутники | 24 плюс 3 запасных |
| Самолеты орбитальные | 3 |
| Угол наклона орбиты | 64,8 градуса |
| Радиус орбиты | 19,140 км |
Космический сегмент ГЛОНАСС состоит из 24 спутников в трех орбитальных плоскостях, по восемь спутников в каждой плоскости.
Геометрия созвездия ГЛОНАСС повторяется примерно раз в восемь дней. Период обращения каждого спутника составляет примерно 8/17 звездных суток, так что за восемь звездных суток спутники ГЛОНАСС совершили ровно 17 орбитальных оборотов.
Каждая орбитальная плоскость содержит восемь равноотстоящих спутников. Один из спутников будет находиться в одной и той же точке неба в одно и то же звездное время каждый день.
Спутники выводятся на условно круговые орбиты с наклонением цели 64.8 градусов и радиус орбиты 19 140 км, что примерно на 1060 км меньше, чем у спутников GPS.
Спутниковый сигнал ГЛОНАСС идентифицирует спутник и включает:
- Информация о местоположении, скорости и ускорении для расчета местоположения спутников.
- Спутниковая информация о состоянии здоровья.
- Смещение времени ГЛОНАСС от UTC (SU) [всемирное координированное время, Россия].
- Альманах всех остальных спутников ГЛОНАСС.
«Земля была абсолютно круглой.. . Я никогда не знал, что означает слово «круглая», пока не увидел Землю из космоса ». Алексей Леонов, советский космонавт, рассказывает о своем историческом выходе в открытый космос в 1985 году.
Сегмент управления ГЛОНАСС
Сегмент управления ГЛОНАСС состоит из центра управления системой и сети станций слежения за командами по всей России. Сегмент управления ГЛОНАСС, аналогично сегменту GPS, контролирует состояние спутников, определяет поправки эфемерид, а также смещения спутниковых часов относительно времени ГЛОНАСС и UTC (всемирное координированное время).Дважды в день загружает поправки на спутники.
Сигналы ГЛОНАСС
Таблица 5 обобщает сигналы ГЛОНАСС.
Таблица 5: Характеристики сигнала ГЛОНАСС
| Обозначение | Частота | Описание |
| L1 | 1598,0625 — 1609,3125 МГц | L1 модулируется сигналами HP (высокая точность) и SP (стандартная точность). |
| L2 | 1242,9375 — 1251,6875 МГц | L2 модулируется сигналами HP и SP. Код SP идентичен тому, который передается на L1. |
Каждый спутник ГЛОНАСС передает на немного разных частотах L1 и L2, с P-кодом (код HP) как на L1, так и на L2, и кодом C / A (код SP) на L1 (все спутники) и L2 (большинство спутников). Спутники ГЛОНАСС передают один и тот же код на разных частотах, метод, известный как FDMA, для множественного доступа с частотным разделением каналов.Обратите внимание, что этот метод отличается от того, который используется в GPS.
СигналыГЛОНАСС имеют ту же поляризацию (ориентацию электромагнитных волн), что и сигналы GPS, и имеют сопоставимую мощность сигнала.
Система ГЛОНАСС основана на 24 спутниках, использующих 12 частот. Спутники могут совместно использовать частоты, имея противоположные спутники, передающие на одной и той же частоте. Спутники-антиподы находятся в одной орбитальной плоскости, но разнесены на 180 градусов. Спаренные спутники могут передавать на одной и той же частоте, потому что они никогда не появятся одновременно в поле зрения приемника на поверхности Земли, как показано на Рис. 32.
Модернизация ГЛОНАСС
По мере того, как нынешние спутники ГЛОНАСС-М подходят к концу срока службы, они будут заменены спутниками ГЛОНАСС-К следующего поколения. Новые спутники обеспечат систему ГЛОНАСС новыми сигналами GNSS.
L3
Первый блок спутников ГЛОНАСС-К (ГЛОНАСС-К1) будет транслировать новый гражданский сигнал, обозначенный L3, с центральной частотой 1202,025 МГц. В отличие от существующих сигналов ГЛОНАСС, L3 основан на CDMA, что облегчит взаимодействие с GPS и Galileo.
Первый спутник ГЛОНАСС-К1 был запущен в феврале 2011 года.
L1 и L2 CDMA
Второй блок спутников ГЛОНАСС-К (ГЛОНАСС-К2) добавляет еще два сигнала на основе CDMA, транслируемых на частотах L1 и L2. Выходящие сигналы FDMA L1 и L2 также будут транслироваться для поддержки унаследованных приемников. Запуск спутников ГЛОНАСС-К2 планируется начать с 2015 года.
L5
Третий блок спутников ГЛОНАСС-К (ГЛОНАСС-КМ) добавит в систему ГЛОНАСС сигнал L5.
Как повысить безопасность автомобилей с помощью ГЛОНАСС и телематики?
Автор: Эким Сарибардак.- Как повысить безопасность автомобилей с ГЛОНАСС и телематикой?
Устройства слежения за транспортными средствами набирают огромную популярность в последние годы. Устройства слежения стали неотъемлемой частью нашей жизни, от управления огромными автопарками до защиты члена семьи, поскольку они информируют нас о местонахождении того, что для нас наиболее важно.Спутниковая система глобального позиционирования принадлежит и управляется ВВС США и постоянно обновляется, но военная принадлежность навигационной системы всегда оставляет вопросительный знак в умах каждого. Что произойдет, если американские военные решат однажды положить конец использованию GPS в гражданских целях или реализовать выборочную доступность по соображениям безопасности? Это одна из основных причин, почему так много стран начали разработку своих спутниковых навигационных систем, а ГЛОНАСС является результатом проекта Федерального космического агентства России, который в настоящее время работает с 24 спутниками, вращающимися вокруг Земли.
Что такое ГЛОНАСС?
ГЛОНАСС — это сокращение от Globalnaya Navigazionnaya Sputnikovaya Sistema, и это русская версия GPS. СССР — Советский Союз — начал разработку спутниковой системы ГЛОНАСС еще в 1976 году, и это самый дорогой проект в истории Российского космического агентства, который стоил примерно 5 миллиардов долларов с дальнейшими инвестициями в 10 миллиардов долларов на процесс модернизации, который будет завершено в 2020 году.
Что чем разница между ГЛОНАСС и GPS?
GPS — основная навигационная система, используемая в устройствах. возможность отслеживания местоположения, такого как смартфоны, навигаторы и все отслеживание устройств.Спутниковая система насчитывает 31 спутник, вращающийся вокруг планеты с 24 спутниками. эксплуатирует семь запасных спутников в в случае неисправности одного из спутников.
ГЛОНАСС имеет сеть из 24 действующих спутников с орбитальной высотой примерно на 2 км выше, чем у GPS. ГЛОНАСС сам по себе не имеет явных преимуществ перед GPS, но при совместном использовании спутниковых систем точность и зона покрытия приемника заметно возрастают. Первоначально ГЛОНАСС была разработана с расчетом на Россию, поэтому она более эффективна в северных регионах, что и является предполагаемой целью системы.
Расширенный Безопасность автомобиля с ГЛОНАСС
Автопроизводители работают вокруг часы, чтобы улучшить встроенные меры безопасности для транспортных средств и попытаться обеспечить своих клиентов с надежным продуктом, способным противостоять безжалостным попыткам угонщиков автомобилей. Однако преступники были знакомы с большинством из них. гарантии, и даже несмотря на то, что с годами они значительно улучшились, большинство воры находят способ обойти эти системы безопасности и управлять угонять автомобили.
Внедрение систем слежения ГЛОНАСС в отрасль автомобильной безопасности было, мягко говоря, революционным развитием. С помощью передовых технологий, таких как телематика и повышенная точность ГЛОНАСС, устройства слежения за транспортными средствами стали одной из самых надежных систем безопасности в мире. Системы слежения за транспортными средствами предлагают передовые и инновационные решения для устранения существующих недостатков безопасности транспортных средств и предоставляют владельцам транспортных средств инструменты для значительного повышения безопасности их транспортных средств.
устройства GPS слежения с поддержкой ГЛОНАСС предлагают известные инструменты для повышения безопасности транспортных средств, пока они стационарно или без присмотра. Преступники всегда ищут возможность угнать автомобиль, и большинство краж — это случайные преступления. С другой стороны, опытные угонщики совершают более сложные преступления, планируя и изучая слабые стороны транспортных средств, чтобы украсть их по определенному заказу или из-за их высокой перепродажи значение. Независимо от характера кражи, автовладельцы должны быть всегда готовы к попыткам кражи.Устройства слежения за транспортными средствами предоставляют владельцам автомобилей доступ к передовым функциям, которые может использоваться как система раннего предупреждения, поскольку а также предлагаем инструменты для быстрого восстановления в случае кражи.
С точки зрения безопасности системы слежения за транспортными средствами не имеют себе равных на рынке. Инструменты, которые они приносят на стол, гарантированно затруднят взлом или угон автомобиля. В то время как такие функции, как чувствительные датчики и геозоны, действуют как превентивная система предупреждения; слежение за местонахождением и иммобилизация в режиме реального времени позволяют определить местонахождение украденного автомобиля и заставить власти безопасно вернуть его законным владельцам.Создание цифрового периметра вокруг вашего дома (зона геозоны) и рабочего места для получения предупреждений, когда транспортное средство нарушает эту границу, представляет собой чрезвычайно эффективную систему сигнализации, которая позволяет владельцам вмешиваться в попытку кражи или незамедлительно предупреждать полицию. Устройства слежения за транспортными средствами превосходят обычные автомобильные сигнализации, которые издают только громкие звуки, к которым люди привыкли и которые большую часть времени склонны игнорировать.
Устройства слежения за транспортными средствами нового поколения, поддерживающие спутниковую систему ГЛОНАСС, обеспечивают большую безопасность, и, учитывая, что 50% украденных автомобилей никогда не возвращаются, жизненно важно как можно быстрее найти украденный автомобиль, прежде чем воры отключат или удалят GPS. отслеживающие устройство.После отключения устройства слежения злоумышленники могут отвезти его в удаленное место и разобрать на запчасти или продать другому лицу. Когда дело доходит до борьбы с угонами транспортных средств, никакие другие устройства или системы безопасности не могут предложить душевное спокойствие и сложные инструменты, которые системы слежения за транспортными средствами предоставляют владельцам автомобилей. Благодаря дополнительной поддержке спутниковой системы ГЛОНАСС транспортные средства стали более безопасными, чем когда-либо, с устройством слежения на борту, а владельцы имеют уникальную возможность вернуть украденный автомобиль.
Об авторе:
Эким Сарибардак — высокомотивированный ИТ-специалист, обладающий бесконечной любовью и страстью к проектам веб-приложений и программного обеспечения. Он обладает техническими знаниями во всех областях телекоммуникаций, технологий GPS, веб-приложений, цифрового маркетинга и управления продуктами, обладает способностью решать проблемы и принимать решения, а также может влиять на других в сложных и сложных обстоятельствах.Он был компьютерным фанатом с 1990 года, с того момента, как впервые взял в руки компьютер. С тех пор он занимается исследованиями и изучением всего, что связано с компьютерами, увлеченный тем, как компьютеры меняют повседневную жизнь. Он работал в области аппаратного и программного обеспечения для различных предприятий более двух десятилетий.
Twitter: https://twitter.com/baaluo
Linkedin: https://www.linkedin.com/in/ekim-saribardak-20816a4a
СвязанныеGPS, ГЛОНАСС, BeiDou, Galileo: преимущества установки Multi-GNSS
Поскольку Интернет вещей (IoT) связывает постоянный поток информации между людьми и процессами, управляющими миром вокруг нас, глобальные навигационные спутниковые системы (GNSS) обеспечивают важные функции, включая синхронизацию и определение местоположения, которые необходимы для повседневной работы устройств. дневные операции.
Глобальные навигационные спутниковые системыиспользуют спутниковую технологию для определения географического положения подключенных устройств. GNSS — это всеобъемлющий термин для категории глобальных систем, включая GPS, ГЛОНАСС, BeiDou и Galileo. И когда одновременно используется более одного созвездия, преимущества этих систем объединяются. Глобальным системам помогают региональные системы дополнений: WAAS в Северной и Южной Америке, EGNOS в Европе, GAGAN в Индии и MSAS в Японии.Эти системы предоставляют данные, необходимые для безопасной навигации самолета. Каждая региональная система предлагает уникальные преимущества в широком диапазоне частот. Региональные системы, такие как QZSS и NavIC, предоставляют дополнительные услуги для своих географических регионов.
IoT-технологии позволяют использовать все, от носимых устройств отслеживания состояния до интеллектуального управления зданием, определения местоположения транспортных средств и отслеживания посылок.
СистемыGNSS поддерживают приложения IoT, предоставляя данные о местоположении и скорости подключенного устройства.Они также предоставляют точную информацию о времени — важный компонент в построении синхронизированной высокоточной сети IoT.
Когда владельцы бизнеса и операторы используют несколько группировок GNSS одновременно, они могут повысить доступность навигационного решения, повысить точность определения местоположения, ускорить работу и, в конечном итоге, сэкономить время и деньги. Все это ключевые факторы, которые следует учитывать при выборе количества систем для использования в IoT.
По мере роста глобального спроса на возможности подключения компании могут ожидать большей интеграции технологий GNSS в 2020 году.Какие платформы GNSS доступны сегодня и чем они отличаются?
4 Системы GNSS и их уникальные особенности
GPS (США)
Хотя GPS и GNSS часто используются как взаимозаменяемые, Глобальная система позиционирования (GPS) является наиболее часто используемой системой спутниковой навигации в мире, работающей с 32 спутников на шести орбитальных плоскостях. Первоначально разработанный в Соединенных Штатах для использования в военных целях, теперь мы видим GPS во всем: от автомобильной навигации до бизнес-тегов в социальных сетях, а также в сельском хозяйстве и картографии.Высокоточная многочастотная система GPS с использованием методов PPP или RTK может определять пространственные местоположения до 10 сантиметров или меньше.
ГЛОНАСС (Россия)
Как и GPS, ГЛОНАСС была разработана в 1970-х годах как российская военная система позиционирования. Коммерческие приложения, такие как передача данных о местоположении и прогноз погоды, начались в 1980-х годах с развертывания 24 спутников на трех орбитальных плоскостях.
BeiDou (Китай)
С 2000 года китайская навигационная спутниковая система BeiDou (BDS) развивалась, чтобы потенциально обогнать GPS в коммерческом глобальном использовании.В настоящее время в своем третьем поколении он утверждает, что обеспечивает точность на уровне миллиметра, которая превосходит другие системы. Однако, имея всего 22 действующих спутника, BeiDou находится в небольшом недостатке с точки зрения точности по сравнению с GPS и ГЛОНАСС. Ожидайте больше спутников и повышение точности к 2020 году.
Галилео (ЕС)
Разработанная Европейским Союзом в 2011 году, система Galileo в настоящее время управляет 14 спутниками и предназначена для обеспечения более точного определения местоположения на более высоких широтах, чем другие системы GNSS.Ожидается, что к 2020 году Galileo будет конкурировать с глобальным охватом GPS с использованием 24 спутников в шести орбитальных плоскостях. В настоящее время Galileo оказывает услуги по реагированию на чрезвычайные ситуации и делает дороги и железные дороги Европы безопасными для всех.
4 преимущества одновременного использования нескольких спутниковых приемников спутниковой связи
Современные модули позиционирования и синхронизации разработаны для одновременного использования преимуществ нескольких созвездий GNSS. Объединение нескольких спутниковых систем улучшает доступность сигналов, дает операторам больший доступ и увеличивает точность.Недавние тесты вождения, сочетающие GPS и ГЛОНАСС, показали заметное улучшение как точности, так и производительности по сравнению с результатами одной системы.
Если вы ориентируетесь в густонаселенном городе, обширной пустыне или густом лесу, использование нескольких систем GNSS поможет вам оставаться на связи и сосредоточиться.
Отрасли и предприятия могут в любой конфигурации достичь следующих преимуществ:
- Добавлена безопасность. В маловероятном случае отказа спутника приемники GNSS автоматически удалят его из навигационного решения.
- Несколько путей. Доступ к нескольким спутникам увеличивает видимость в регионах с естественными или искусственными препятствиями (городские каньоны создаются высокими, сгруппированными зданиями и могут серьезно влиять на точность одночастотной GNSS) и улучшает время до первого исправления (TTFF), то есть меру времени необходим для того, чтобы подключенное к GNSS устройство могло определить свое местоположение.
- Перспективы будущего. Интеграция систем — это форма, ориентированная на будущее, поскольку изменения в каждой системе отражают изменения на рынке с разной скоростью.
- Повышенная целостность данных . Galileo обеспечивает повышенные функции безопасности для морской, железнодорожной, логистической и автомобильной промышленности. Разделение нескольких систем, таких как Galileo, с GPS, дает более широкую сеть с точки зрения досягаемости, позиционирования и точности.
В поисках подходящих решений для нескольких созвездий будущего
Telit предлагает множество решений для тех, кому интересно, какие услуги существуют для использования сигналов от нескольких созвездий GNSS.Telit — одна из немногих компаний IoT, использующих для своих клиентов несколько решений GNSS. Наше семейство модулей Jupiter SL869 дает клиентам возможность включать измерения сигналов от различных технологий GNSS в режиме реального времени. Протестируйте один из наших модулей GNSS в своем приложении.
Спутниковый лазерный дальномер для GPS и ГЛОНАСС
LRA GPS были сконструированы Российским институтом космической техники и по конструкции аналогичны используемым на спутниках ГЛОНАСС.Однако общая отражающая площадь намного меньше из-за ограниченного места для установки спутников GPS. GPS-35 и GPS-36 были развернуты с LRA в рамках эксперимента NAVSTAR-SLR. Первыми спутниками, которые будут развернуты с LRA в рабочем режиме, будут GPS-III, которые заменят существующие спутники GPS. Первый запуск спутника GPS-III запланирован на 2016 г., но запуск первой машины, оснащенной LRA, состоится не ранее 2019 г. (Thomas and Merkovitz 2014).
У каждого световозвращателя GPS-35/36 задняя отражающая поверхность покрыта алюминием. Матрица ретрорефлекторов GPS состоит всего из 32 угловых кубов из плавленого кварца (для ГЛОНАСС количество угловых кубов варьируется от 112 до 396), которые расположены на плоской панели чередующимися рядами из четырех или пяти кубов. Размер массива равен \ (239 \ умножить на 194 \ умножить на 37 \) мм по длине, ширине и высоте соответственно.
Небольшой размер LRA вызывает трудности с отслеживанием спутников GPS для многих SLR станций, особенно в девяностые годы, из-за низкой энергии возвращаемых импульсов.С другой стороны, лучше определяется оптический центр (эффективная точка отражения) меньших решеток. Меньшие LRA подвержены меньшим изменениям эффективных точек отражения для разных углов падения.
RMS остатков для GPS и ГЛОНАСС
На рисунке 2 показаны RMS остатков SLR для всех GPS и всех ГЛОНАСС относительно. 1-дневные спутниковые дуги (CF2) и средний день 3-дневных спутниковых дуг (CO2). Наибольшее среднеквадратичное значение остатков для результатов GPS за 1994 год с 35 и 41 мм для растворов CO2 и CF2, соответственно, тогда как наименьшее среднеквадратичное значение результатов за период 2000–2007 годов.В 2003 году среднеквадратичное значение остаточных выбросов составляло всего 16 мм для CO2. Многие составляющие вносят вклад в RMS остатков SLR: с одной стороны, все вопросы, связанные с моделированием спутниковых орбит (например, неправильное моделирование давления солнечного излучения), распространение микроволнового сигнала через тропосферу и ионосферу, а с другой стороны, все вопросы, связанные с сбор данных SLR (например, джиттер фотонных детекторов, проблемы калибровки) и вопросы, связанные с обработкой данных SLR (например, атмосферные задержки). Также важна точность определения смещений LRA и смещений микроволновых антенн.Несмотря на все эти проблемы, общее согласие и согласованность между решениями SLR и GPS находится на замечательном уровне около 20 мм с точки зрения RMS остатков SLR.
Рис. 2RMS остатков SLR спутников GPS и ГЛОНАСС в 1994–2013 гг. Для однодневных спутниковых дуг (CF2) и 3-дневных спутниковых дуг (CO2)
Среднеквадратичное значение остатков SLR для ГЛОНАСС составляет 46 и 57 мм в 2002 году для растворов CO2 и CF2, соответственно, и снижено до 37 мм в 2013 году, что означает, что даже в последние годы точность орбит ГЛОНАСС не достигла этого уровня. орбит GPS.Однако количество наблюдений SLR на ГЛОНАСС существенно выросло в 2011 году, когда все больше и больше станций ILRS начали отслеживать всю группировку ГЛОНАСС. Среднегодовое количество SLR-наблюдений на двух спутниках GPS составляет 5400 с максимальным значением 8700 в 2005 году. Количество SLR-наблюдений на все спутники ГЛОНАСС варьируется от 10700 наблюдений в 2004 году (за этот период отслеживалось 3 спутника ГЛОНАСС) до 87000 в 2013 год, когда было отслежено все созвездие.
Рисунок 2 также показывает, что RMS остатков SLR обычно меньше для 3-дневных растворов CO2, чем для однодневных растворов CF2, в среднем на 4% для GPS и от 30% в 2002–2005 гг. До 1% в 2013 для ГЛОНАСС.Для GPS разница между CO2 и CF2 наибольшая в 1994 г. и в период 1999–2003 гг. В трехдневных решениях GNSS орбиты спутников являются непрерывными, параметры вращения Земли наложили непрерывность на границах суток, и в результате трехдневные решения намного более стабильны, чем однодневные решения GNSS. Lutz et al. (2015) изучили различные длины дуги орбит GPS и ГЛОНАСС и обнаружили, что создание решений для 3-дневной дуги улучшает, в частности, оценки полярных скоростей и координат геоцентра.На рисунке 2 показано, что определение 3-дневной дуги является преимуществом, в частности, для неполных спутниковых группировок, наблюдаемых разреженной и неоднородно распределенной наземной сетью приемников ГЛОНАСС в первые годы внедрения решений ГЛОНАСС (то есть до 2009 г.).
После 2008 года CO2 и CF2 показывают одинаковые характеристики для спутников GPS. На рисунке 2 показано, что после 2008 г. среднеквадратичное значение невязок увеличивается в обоих решениях, что может быть связано, с одной стороны, с увеличением числа вновь установленных станций SLR, которые не были учтены в решении ITRF2008 и имеют только приблизительные координаты в SLRF2008, и, с другой стороны, это может быть связано с процессом старения спутников GPS.Спутники GPS Block IIA были рассчитаны на 7,5 лет, тогда как их реальный срок службы был в три раза больше (около 21 года). Ожидалось, что центр масс спутников GPS изменит свое положение на 4,6 мм. Footnote 9 в направлении \ (Z \) в течение 7,5-летнего срока службы миссии из-за сгорания топлива во время маневров спутника. В этом исследовании мы используем среднее значение смещения LRA относительно. центр масс спутника за весь период, что также может способствовать увеличению RMS остатков SLR в последние годы миссии.
В следующих разделах обсуждаются только результаты по CO2, так как растворы CO2 обладают лучшими характеристиками по сравнению с CF2.
Остатки, связанные со станцией
На рисунке 3 показаны средние значения остатков SLR (средние значения SLR) для наиболее эффективных станций SLR, при этом среднеквадратичные значения остатков показаны в виде столбцов ошибок. Для большинства станций средние значения SLR отрицательны со средними значениями \ (- 12,8 \) и \ (- 13,5 \) мм для GPS-35 и GPS-36 соответственно. Однако средние невязки одинаковы для обоих спутников в случае наиболее эффективных SLR-станций, что указывает на то, что смещения связаны с лазером, типами детекторов и режимами обнаружения, используемыми на разных SLR-станциях.
Рис. 3Средние невязки остатков SLR для спутников GPS в 1994–2013 гг. Для наиболее эффективных SLR станций. Станции отсортированы по общее количество собранных SLR наблюдений
Рисунок 4 показывает, что смена оборудования также влияет на расчетные остатки SLR. В Циммервальде (7810) первые наблюдения GPS-36 были собраны в 1998 году с использованием вторичной длины волны титан-сапфирового лазера (синий лазер), но в то время станция могла отслеживать спутники GPS только ночью.В 2002 году была установлена новая фотоумножительная трубка для инфракрасного лазера, позволяющая вести дневное слежение. В Циммервальде до 2008 года использовалась двойная приемная система: для синего лазера использовалась система компенсированных однофотонных лавинных диодов (CSPAD) (с двумя заменами в 2003 и 2006 годах), а для инфракрасного лазера использовался фотоумножитель. Разные длины волн и разные детекторы показали систематические отклонения между инфракрасным и синим лазерными диапазонами (например, Schillak 2013). Лазер в Циммервальде был заменен на Nd: YAG в марте 2008 г. (Gurtner et al.2009 г.). С тех пор станция использует только зеленый лазер (вторичная длина волны) с детектором CSPAD, работающим в низкоэнергетическом режиме (обнаруживая от одиночных до нескольких фотонов). Эти усовершенствования оборудования отражены в различных значениях средних смещений SLR для Циммервальда на рис. 4. На станции Яррагади (7090) в 1998 году была установлена новая приемная система. После этого события среднее значение SLR для Яррагади стабильно на уровне \ (- От 20 \) до \ (- 30 \) мм. Никаких изменений не произошло, несмотря на замену в 2009 году микроканального пластинчатого детектора, которая позволила отслеживать спутники GNSS в дневное время.
Рис. 4Средние значения остатков SLR для GPS-36 в 1994–2013 гг. Для наиболее эффективных SLR станций
Средняя невязка всех пикетов (см. Рис. 4, крайний правый столбец) принимает максимальное значение между 1999 и 2002 гг. (Примерно \ (- 23 \) мм) и после 2010 г. (\ (- 14 \) мм), тогда как самый маленький в 1995 году (\ (- 3 \) мм). Можно было бы ожидать линейного изменения среднего SLR из-за изменения центра масс спутника в течение срока службы спутника, а не сигнатуры с двумя минимумами и двумя максимумами.Таким образом, вариации средних смещений в основном связаны с заменой оборудования на станциях SLR, но они также могут быть связаны с некоторыми неверно смоделированными членами ионосферной задержки более высокого порядка в решениях для микроволновых систем GNSS. На основе анализа данных GOCE было обнаружено, что моделирование ионосферной задержки высокого порядка, предложенное Конвенциями IERS 2010, не может полностью учесть большие задержки микроволнового сигнала в ионосфере в периоды высокой солнечной активности (Jäggi et al. 2015) . Задержка ионосферного сигнала высокого порядка GNSS может быть недооценена при использовании априорных карт ионосферы с недостаточным пространственным и временным разрешением, что приводит к усреднению больших кратковременных задержек сигнала в ионосфере.Периоды максимальных отрицательных средних значений SLR соответствуют периодам наивысшей солнечной и, следовательно, самой высокой активности ионосферы. Вопросы, связанные с моделированием ионосферных запаздываний высокого порядка в решениях ГНСС СВЧ, требуют дальнейшего анализа.
Эффект спутниковой сигнатуры
Размер плоских бортовых лазерных решеток и разброс оптических импульсов из-за отражения от нескольких отражателей является одним из основных источников ошибок в SLR, и его часто называют эффектом спутниковой сигнатуры (Otsubo et al. al.2001).
Для однофотонных систем средняя точка отражения совпадает с центром массива, поскольку она соответствует центру тяжести остаточной гистограммы. Поскольку каждый обнаруженный фотон может исходить от любого из ретрорефлекторов, пространственное распределение всего массива отображается на основе многих обнаружений (Otsubo et al. 2015). Таким образом, в SLR-станциях, работающих в однофотонном режиме, отсутствуют проблемы, связанные с разными углами падения лазерного луча для плоских LRA. Herstmonceux (7840) — единственная станция, работающая строго на однофотонном уровне с использованием режима Гейгера, так что она способна делать только одно обнаружение за лазерный выстрел после включения стробирующей подсистемой (Wilkinson and Appleby 2011). .Грац (7839) и Циммервальд (после 2008 г.) также используют детекторы CSPAD с низкой скоростью возврата, что позволяет лазерному излучению от этих станций минимизировать эффект сигнатуры спутника.
SLR станции NASA, например, McDonald (7080), Yarragadee (7090), Greenbelt (7105) и Monument Peak (7110), как правило, оснащены микроканальными пластинами с высоким уровнем обнаружения (многофотонный режим). . Эффективный размер массива, который является мерой разброса оптических импульсных сигналов из-за отражения от нескольких отражателей, выше для высокоэнергетических систем обнаружения, поскольку время обнаружения определяется на некотором пороговом уровне на переднем фронте отраженного сигнала. пульс.Otsubo et al. (2001) обнаружили, что эффективный размер массива для спутников ГЛОНАСС старого класса с большими LRA (396 угловых кубов) составляет от +0,1 до +0,3 м для многофотонных систем, тогда как он составляет от \ (- 0,1 \) до +0,1 м. для однофотонных систем. Эта разница эквивалентна измеренным диапазонам на 15–45 мм короче, чем ожидалось, для систем многофотонного обнаружения, наблюдающих спутники ГЛОНАСС при малых и больших углах возвышения.
Рисунок 4 показывает, что станции НАСА SLR (7080, 7090, 7105, 7110), наблюдающие в многофотонном режиме, имеют большие отрицательные средние значения SLR, обычно от \ (- 10 \) до \ (- 35 \) мм, тогда как станции, работающие с низким уровнем возврата (7810 после 2008 г., 7839, 7840), имеют средние значения SLR от +10 до \ (- 15 \) мм.Это ясно показывает, что системные поправки смещения LRA, аналогичные тем, которые используются Рабочей группой анализа ILRS для LAGEOS и Etalon (Otsubo and Appleby, 2003), а в будущем также для Ajisai (Otsubo et al. 1999), LARES, Stella и Starlette (Otsubo et al. 2015) срочно необходимы для спутников GNSS.
Принимая только остатки от Herstmonceux (7840), работающего строго в однофотонном режиме, среднее значение SLR за период 1995–2010 гг. Footnote 10 составляет \ (- 4,2 \) мм с наклоном \ (- 0.65 \) мм / год, что немного больше, чем ожидаемое изменение центра масс спутника в течение срока службы спутника (номинальное значение \ (- 0,61 \) мм / год при 7,5-летнем сроке службы спутника, и \ (- 0,23 \) мм / год при условии существования спутника 21 год). Это небольшое значение среднего SLR указывает на то, что наблюдения GNSS на основе микроволновых и оптических сигналов SLR в настоящее время совпадают на уровне нескольких миллиметров. Согласованность между обоими методами космической геодезии может быть дополнительно увеличена за счет учета геофизических и технических различий между микроволновыми и оптическими методами космической геодезии (см. Следующий раздел).
Средние невязки GPS-SLR: сводка
Таблица 2 суммирует средние SLR и RMS остатков для двух спутников GPS, оснащенных LRA. Среднее смещение меньше, чем в предыдущих исследованиях. Очень раннее сравнение орбит GNSS на основе SLR и микроволнового диапазона, проведенное Павлисом (1995), показало различия в радиальном направлении 36–89 мм при RMS 77–98 мм. Flohrer (2008) сообщил о смещении \ (- 35 \) и \ (- 38 \) мм для GPS-35 и GPS-36 соответственно. Thaller et al.(2011) сообщили о смещениях в \ (- 19 \) и \ (- 26 \) мм. Наше исследование показывает средние смещения \ (- 12,8 \) и \ (- 13,5 \) мм для GPS-35 и GPS-36 соответственно. Уменьшение средних смещений SLR было достигнуто за счет
моделирование альбедо Земли и давления инфракрасного переизлучения (около 10 мм) (Родригес-Солано и др. 2012),
Таблица 2 Характеристики наблюдения SLR со спутников GPSмоделирование тяги антенны (5–10 мм),
, использование согласованного опорного кадра (идентичные масштабы опорных кадров в IGb08 и SLRF2008) и улучшенное моделирование фазового центра в igs08.atx.
В предыдущих реализациях наземной системы отсчета, специфичных для конкретной техники, масштаб был другим, например, в SLRF2005 и IGS05. В настоящее время во всех космических геодезических методах используются системы координат с масштабным определением ITRF2008.
В данном исследовании средние значения остатков SLR для спутников GPS находятся на уровне \ (- 13 \) мм. Однако это можно уменьшить, используя
- .
Поправки на нагрузку атмосферным давлением для устранения систематических эффектов, связанных с погодозависимостью решений SLR, т.е.э., так называемый эффект голубого неба,
моделирование временных изменений центра масс спутника в течение срока службы спутника,
моделирование вариаций эффективных точек отражения для разных углов падения для разных детекторов SLR и спутниковых ретрорефлекторов,
улучшенное моделирование давления солнечной радиации на спутники GNSS,
улучшенное моделирование ионосферных задержек высшего порядка для сигналов GNSS,
улучшенные значения смещения спутниковых антенн СВЧ диапазона.
Sośnica et al. (2013) показали, что эффект голубого неба составляет в среднем 1 мм и может достигать 4,4 мм для континентальных SLR станций. Арнольд и др. (2015) показали, что средние остатки SLR для спутников GPS уменьшаются примерно на 2 мм с использованием расширенной модели ECOM для воздействия давления солнечной радиации. Изменение центра масс спутника может быть причиной смещения до 5 мм, тогда как вариации эффективных точек отражения для разных углов падения для разных приемных систем зависят от эффективного размера ретрорефлектора и могут даже достигать значений до до 22 мм для крупногабаритных LRA ГЛОНАСС Otsubo et al.(2001).
Thaller et al. (2012b) обнаружили, что смещения микроволновых антенн IGS08 не соответствуют масштабу SLR опорного кадра ITRF2008. Расчетные смещения спутниковых антенн составляют \ (- 86 \) и \ (- 110 \) мм для спутников GPS и ГЛОНАСС соответственно. Springer et al. (2009) нашли поправки на смещение антенны относительно официальные значения igs05.atx превышают значения \ (- 300 \) мм для некоторых спутников GNSS с использованием анализа решений только для GNSS и GNSS-SLR. Большие значения поправок смещения спутниковой антенны (даже \ (- 300 \) мм) по сравнению с малым средним значением w для SLR.r.t. Орбиты GNSS (примерно \ (- 13 \) мм) указывают на то, что неточные смещения микроволновых антенн должны быть поглощены параметрами, полученными из GNSS, кроме спутниковых орбит, например, часами спутника или приемника, задержками в тропосфере, фазовой неоднозначностью или вертикальной составляющей. координат станции. Таким образом, мы делаем вывод, что оставшиеся смещения между решениями SLR и GNSS в наибольшей степени возникают из-за вариаций эффективных точек отражения для различных систем приема SLR, моделирования задержек в ионосфере высокого порядка, эффекта голубого неба и моделей GNSS. давления солнечной радиации.Последний будет рассмотрен в Разд. 5.
Недорогой алгоритм точного позиционирования GPS / ГЛОНАСС в ограниченном пространстве
% PDF-1.4 % 1 0 объект > эндобдж 7 0 объект /Заголовок /Предмет / Автор /Режиссер / Ключевые слова / CreationDate (D: 20210516071139-00’00 ‘) / ModDate (D: 20130529170908 + 02’00 ‘) >> эндобдж 2 0 obj > эндобдж 3 0 obj > эндобдж 4 0 obj > эндобдж 5 0 obj > эндобдж 6 0 obj > поток application / pdf
Усовершенствование кинематики в реальном времени на основе сети GNSS на основе глубокого обучения для автономной наземной навигации
В последние несколько десятилетий в значительной степени в навигации использовалась глобальная навигационная спутниковая система (GNSS). Кроме того, с наступлением эры мульти-GNSS для навигации становится все больше и больше спутников.Однако навигация обычно осуществляется путем позиционирования точек на основе псевдодальностей. Кинематика в реальном времени (RTK) и передовые технологии, а именно сетевой RTK (NRTK), были внедрены для лучшего позиционирования и навигации. Дальнейшее улучшение навигации также было исследовано путем объединения других датчиков, таких как инерциальный измерительный блок (IMU). С другой стороны, техника глубокого обучения в последнее время развивается во многих областях, включая автоматическую навигацию транспортных средств.Это связано с тем, что глубокое обучение объединяет различные датчики без сложного аналитического моделирования каждого отдельного датчика. В этом исследовании мы структурировали многослойные рекуррентные нейронные сети (RNN) для повышения точности и стабильности абсолютных решений GNSS для автономной навигации транспортных средств. В частности, долговременная краткосрочная память (LSTM) является особенно полезным алгоритмом для данных временных рядов, таких как навигация с умеренной скоростью платформ. В результате эксперимента, проведенного в испытательной зоне, алгоритм LSTM повысил точность позиционирования примерно на 40% по сравнению с навигацией только с использованием GNSS без какой-либо внешней информации о смещении.Как только смещение будет устранено, точность будет значительно улучшена, до 8 раз лучше, чем результаты абсолютного позиционирования GNSS. Условия смещения решения должны быть оценены в рамках модели путем оптимизации слоев, а также узлов на каждом уровне, что должно быть выполнено в дальнейших исследованиях.
1. Введение
В последние годы автономное навигационное транспортное средство стало самой популярной темой в области позиционирования. Его обычно классифицируют как транспортное средство, которое перемещается за счет внедрения информационно-коммуникационных технологий (ИКТ) для самостоятельного распознавания условий движения, принятия решений и, наконец, управления маршрутом с минимальным вмешательством пользователя.Хотя существует множество вспомогательных систем для водителя, таких как Advanced Driver Assistance Systems (ADAS) или Система предотвращения столкновений (CAS), полная оперативная самонавигация пока недоступна.
Первый автономный навигационный аппарат был инициирован во время Гранд-конкурса в 2004 году, организованного Агентством перспективных оборонных исследовательских проектов (DARPA), а затем проведенного в сложной городской местности [1]. Как хорошо известно, глобальная навигационная спутниковая система (GNSS) играет важную роль в навигации наземных транспортных средств.Дальнейшее улучшение точности позиционирования было достигнуто благодаря введению в середине 1990-х годов корректирующей информации: дифференциальная GPS (DGPS) для псевдодальностей и кинематика в реальном времени (RTK) для фаз несущей [2, 3]. Однако решение GNSS уязвимо для блокировки сигнала из таких окружающих сред, как туннели и городские каньоны, или непредсказуемого многолучевого распространения.
Хотя от RTK для коротких базовых линий ожидается дециметровая или лучшая точность, в реальном времени возможно даже более точное позиционирование благодаря сложным методам коррекции, называемым сетевым RTK (NRTK) [4, 5].Однако такой уровень точности может быть достигнут только для «статической» обработки, в то время как навигация транспортного средства обычно выполняется в «кинематическом» режиме с десятками метров.
Автономная навигация обычно основана на точном позиционировании, но ее нельзя гарантировать только с помощью GNSS. Для поддержки точного позиционирования объединено множество различных типов датчиков, в том числе RADAR или LiDAR для просмотра, в каком направлении двигаться, и инерциальный измерительный блок (IMU) для отслеживания линейных и / или вращательных движений транспортного средства.Следовательно, необходимо интегрировать различные датчики, чтобы компенсировать слабость GNSS и оценить точное местоположение транспортных средств [6]. Подробный пример автономного автомобиля был обсужден на основе распределенной архитектуры [7]. Кроме того, были проведены многочисленные исследования интеграции техники GNSS / IMU и RTK для приложений беспилотных летательных аппаратов (БПЛА), но в большинстве из них используется одночастотный приемник GNSS [8, 9].
Фильтр для интеграции данных датчика требует аналитической модели для каждого конкретного датчика.В настоящее время он включает в себя GNSS, IMU и бортовой датчик скорости вращения колеса (WSS), но в ближайшем будущем будет доступно большое количество датчиков [10]. Следовательно, фильтр оценки должен быть переработан, чтобы включить все эти данные датчиков, чтобы интегрировать положение транспортного средства, что приводит к чрезвычайно увеличению сложности фильтра.
Точная и надежная информация о местоположении для самонавигационных транспортных средств иногда недостижима из-за уязвимости сигнала GNSS, как упоминалось выше.Цель этого исследования — разработать модель для оценки положения транспортного средства без изменения аналитической модели каждого отдельного датчика с ограничениями. Мы применили метод глубокого обучения для прогнозирования местоположения автомобиля на основе мультисенсорных данных, включая GNSS. Полевой эксперимент проводился с использованием мобильной картографической системы (MMS) [11] с бортовыми датчиками, где в качестве эталона использовалась высококачественная система GPS / INS. Концепция глубокого обучения описана в следующем разделе, а затем следуют результаты тестирования и обсуждение.
2. Структура глубокого обучения
С момента появления нейронных событий и сложных логических средств для сетей [12] многие исследователи изучали, как имитировать человеческий мозг в системе. Хотя алгоритм персептрона, основанный на контролируемом обучении, уже был разработан в середине -х годов века [13], метод глубокого обучения долгое время не применялся на практике из-за нехватки вычислительных ресурсов. Новая процедура обучения, называемая обратным распространением для сетей, была предложена для многократной корректировки весов узлов в сети, чтобы минимизировать разницу между фактическим выходным вектором и сгенерированными помеченными наборами данных [14].Это обучение с обратным распространением было применено к практической задаче рукописного почтового индекса с коротким временем обучения и улучшенной производительностью [15].
Большинство исследований глубокого обучения сосредоточено на приложениях на основе изображений, таких как дистанционное зондирование, сопоставление изображений и их классификация, а также обнаружение дорожных объектов путем объединения различных источников [16–19]. Методы долговременной краткосрочной памяти (LSTM) и вариации рекуррентных нейронных сетей (RNN) в основном применялись для навигации наземных транспортных средств, БПЛА и робототехники [20–22].Это связано с тем, что данные навигации представлены во временном ряду, который подходит для модели LSTM. Данные MEMS IMU обычно интегрируются с наблюдениями GNSS, чтобы дополнить слабые места каждого датчика. Следовательно, метод глубокого обучения может фильтровать два источника данных без создания сложных аналитических моделей [23].
Теория (искусственной) нейронной сети оказала огромное влияние на многие области, включая автономную навигацию транспортных средств и множество интеллектуальных приложений.Хотя теория была предложена давно, метод нейронной сети был доступен только в последние годы из-за ограничений вычислительных ресурсов, как упоминалось выше.
Нейронная сеть определяется как сеть нейронов, которая имитирует структуру нейрона человека для принятия различных решений. Нейроны передают сигнал, если он превышает пороговое значение. Для простой модели мы предполагаем, что нейрон получает сигналы от входных нейронов. Необходимо учитывать три фактора: интенсивность входного сигнала, пороговое значение и, наконец, интенсивность выходного сигнала.Как только входные сигналы принимаются нейронами, они умножаются на вес каждого нейрона, а затем объединяются в выходной сигнал, который может или не может быть передан в зависимости от порогового значения. На рисунке 1 показана базовая структура нейронной сети.
Процесс можно представить следующим уравнением: где представляет функцию активации, которая решает, передает ли нейрон значение или изменяет его, а термин представляет значение смещения, которое нужно добавить к произведению входных данных, умноженному на вес.Наша цель — оценить вес каждого нейрона и вектора смещения, чтобы лучше представить выходной сигнал.
На рисунке 2 показана одна из функций активации, то есть сигмоидальная функция и ее производная по времени. Сигмоидальная функция может использоваться для имитации кумулятивной функции распределения, а выходные значения находятся в диапазоне от 0 до 1, что в общих случаях является реалистичным. Однако, как мы можем видеть на рисунке 2, максимальное значение производной по времени сигмовидной функции, оцененной как 0, составляет около 0.25, что делает систему нечувствительной, если мы имеем дело с несколькими скрытыми слоями [24]. Поэтому в некоторых случаях целесообразно вводить различные типы функций активации, такие как выпрямленный линейный блок (ReLU) [25]. Конечная цель — найти вектор весов и смещение путем минимизации функции кросс-энтропии, то есть количества ошибки при оптимальных условиях. Процесс может выполняться итеративно на основе принципа градиентного спуска.
Для линейных несепарабельных задач был предложен «многослойный» персептрон (MLP) для решения нелинейной задачи посредством процесса обучения распространению ошибок [14, 26].Алгоритм MLP состоит из входного, скрытого и выходного уровней, которые можно описать следующим образом: где — векторная переменная для входных данных, — матрица весов, — выходная переменная для -го скрытого узла , и — функции активации для входного и выходного уровней соответственно. Наиболее важной характеристикой MLP является гибкость типов входных данных, что приводит к различному количеству скрытых слоев, а также количеству узлов в скрытом слое в зависимости от входных данных.Поскольку веса внутренних скрытых слоев регулируются во время процесса, значение каждого узла отражается, что является полезной особенностью процесса обратного распространения [26].
Рекуррентная нейронная сеть (RNN) — это алгоритм, состоящий из структуры циркуляции [20, 22, 23, 27]. Скрытые узлы содержат информацию о направлении; таким образом, прошлые и текущие данные связаны и составляют тираж. Следовательно, полезно анализировать данные временных рядов из-за внутренней информации о времени.Алгоритм RNN имеет гибкую структуру и разнообразные характеристики, поскольку длина последовательности в этом случае не имеет значения. Кроме того, на RNN может влиять вывод предыдущих данных. На рисунке 3 показана структура структуры RNN.
Долговременная краткосрочная память (LSTM) [20, 21, 23] является расширением алгоритма RNN путем добавления дополнительных шлюзов к скрытым слоям RNN (см. Рисунок 4) [28]. Ворота состоят из трех типов: входные, выходные и забытые.Следует упомянуть, что вентиль забывания играет роль в определении того, удалять ли прошлую информацию или нет, в зависимости от выходных данных функции активации (от 0 до 1).
3. Результаты и обсуждение
3.1. Стратегия эксперимента
Как упоминалось в разделе 1, определение местоположения только с помощью GNSS не может гарантировать требуемую точность из-за доступности сигналов в городских каньонах или туннелях. Для эксперимента по глубокому обучению навигации наземных транспортных средств мы использовали данные мобильной картографической системы (MMS) для создания модели для оценки следов транспортных средств (см. Рисунок 5).Эксперимент проводился на вытянутой форме парковки в Институте науки и технологий Тэгу Кёнбук (DGIST) 9 ноября 2015 года (рис. 6).
Интегрированная система GPS / INS, а именно POSLV, была установлена на транспортном средстве MMS вместе с дополнительным независимым приемником GNSS. Бортовые датчики работают вместе через сеть контроллеров (CAN), которая включает в себя датчики скорости вращения колес и скорости поворота, датчик силы тяжести, датчик рулевого управления и спидометр автомобиля.Приемник NovAtel GNSS предоставляет решение для навигации на основе псевдодальностей. Более точное и точное решение было рассчитано с помощью POSLV на основе измерений фазы несущей и встроенных датчиков IMU, которые использовались в качестве эталона в этом исследовании. Датчик MTi-G-700 [29] генерирует данные акселерометра и гироскопа, также доступны данные об атмосферном давлении. Мы использовали данные рыскания в эпоху, чтобы оценить положение транспортного средства в эпоху. Поскольку положение и скорость в основном являются результатом интеграции ускорения транспортного средства, выходной сигнал акселерометра тесно связан с положением / скоростью.Однако для простой реализации техники глубокого обучения мы обучили модель на основе положения из абсолютного положения GNSS (преобразованного в плоские координаты), данных датчика скорости колеса и информации о рысканье, полученной от MTi-G-700. датчик. Для более тщательного обучения модели данные акселерометра должны быть включены в дальнейший анализ. В таблице 1 приведены технические характеристики и выходные данные датчиков, используемых в этом исследовании.
| |||||||||||||||||||||||||||||||||||||||
| Этот символ представляет собой контрольную истину для сравнения результатов. | |||||||||||||||||||||||||||||||||||||||
Библиотека с открытым исходным кодом Keras [16, 30], реализованная с использованием TensorFlow и Theano на основе Python, использовалась для обучения и тестирования данных для оценки алгоритма глубокого обучения. Кроме того, поскольку модули в Keras работают независимо, пользовательская модель может быть легко сгенерирована путем объединения модулей.
На рисунке 7 показано графическое представление схемы тестирования глубокого обучения, использованной в этом исследовании. Две трети данных использовались для обучения модели, а остальные были зарезервированы для оценки производительности и точности модели.Необработанные данные включают в себя GNSS, IMU и бортовой датчик транспортного средства. В этом исследовании использовалась модель LSTM, которая особенно полезна для данных временных рядов, как упоминалось выше. Это обучение с учителем, и модель оптимизируется в процессе обучения. Наконец, прогнозируемое положение транспортного средства сравнивалось с исходным положением для расчета точности модели.
3.2. Анализ результатов
На рис. 8 показана траектория транспортного средства, на которой вместе построены два решения: одно для решения POSLV с постобработкой, а другое — абсолютное позиционирование на основе псевдодальностей.Оба решения представляют собой абсолютные координаты автомобиля в глобальной системе отсчета. Разница между решениями для каждой эпохи составляет около 3,5 м (точность по горизонтали) с точки зрения среднеквадратичной ошибки (RMSE), в то время как компонент Север-Юг принимает на себя большую часть ошибок (см. Таблицу 2). Антенна приемника GNSS устанавливается спереди, а POSLV для эталонного решения устанавливается в задней части автомобиля, что приводит к смещению (плеча рычага) между двумя опорными точками.Поскольку форма стоянки для сбора данных вытянута в направлении север-юг, кажется, что смещение немедленно влияет на среднюю ошибку в этом направлении. Следовательно, смещение необходимо откалибровать заранее, и, кроме того, необходимо оценить величину смещения в решении GNSS во время процесса глубокого обучения, который следует изучить дополнительно.
| ||||||||||||||||||||||||||||
Как обсуждалось выше, модель LSTM обычно работает лучше, чем любая другая модель, особенно для данных временных рядов. Однако (предполагаемые) входные данные из решения псевдодальности NovAtel явно отклоняются от справочных данных, как видно на графике траектории.Интересно то, что «ошибки» имеют почти круглую форму, как это видно на Рисунке 9, даже несмотря на то, что полигон вытянулся в направлении север-юг.
Даже в модели LSTM смещение может повлиять на окончательное предсказанное решение. Таким образом, член смещения, а также круговое отклонение оценивались с использованием обычного решения наименьших квадратов (LESS), чтобы изолировать систематические ошибки от решения, основанного на методе глубокого обучения. Смещение оценивается в 2.54 м и -0,95 м для северного и восточного компонентов соответственно, а также радиус 2,73 м. После корректировки смещения RMSE снижается до 0,83 м в горизонтальной плоскости, хотя большинство ошибок приписывается компоненту Север-Юг.
Алгоритм LSTM — это рекуррентная нейронная сеть, в которой прошлые данные могут влиять на текущие данные. Следовательно, он обычно хорошо работает для навигации по транспортным средствам, которая в основном представляет собой данные временного ряда. В ходе нескольких экспериментов мы создали обучающую модель с двумя скрытыми слоями с 4 и 2 узлами в каждом.Кроме того, для вычисления функции потерь использовалась среднеквадратическая ошибка, а для функции активации — Адам. Входные данные состоят из 4 характеристик, то есть двух горизонтальных составляющих, скорости и информации о рысканье.
3.3. Прогнозирование для автомобильной навигации
Для автомобильной навигации, основанной на глубоком обучении, мы подготовили входные данные из выходных данных датчика. Датчик GNSS (NovAtel DL-V3-GENERIC) обеспечивает решение для абсолютного позиционирования в декартовой системе координат глобального кадра с интервалом 1 Гц.Однако IMU и бортовые датчики имеют более высокие частоты на частоте 100 Гц, поэтому пропуски выходного сигнала GNSS должны быть заполнены, чтобы соответствовать временному интервалу. На этапе обучения решение GNSS было интерполировано с интервалом 100 Гц с использованием (будущего) выходного решения (соответствует Интерпол. В таблице 2). Однако, поскольку он недоступен для интерполяции в приложении реального времени, мы сгенерировали экстраполированное положение на основе скорости транспортного средства от бортовых датчиков и предыдущих положений (соответствует Extrapol.в таблице 2). Как интерполированные, так и экстраполированные случаи сравниваются с эталонным решением, то есть решением POSLV, для анализа характеристик решения после преобразования в горизонтальный кадр (локальный опорный кадр North-East-Up).
Таблица 3 показывает статистику результатов прогнозирования горизонтальной составляющей с помощью модели LSTM. Исходный результат абсолютного позиционирования GNSS показывает RMSE около 3,8 м, но он падает до 2,3 м с экстраполированным положением на основе предыдущих результатов.Прогнозируемые горизонтальные координаты улучшаются почти на 40% (северо-восточный кадр, указанный в метрах), когда становится доступным интерполированное положение. Интересно, что нет существенной разницы между интерполяцией и экстраполяцией с точки зрения точности позиционирования. Следовательно, его, безусловно, можно применить к приложениям реального времени.
Как упоминалось выше, в абсолютном решении GNSS существует систематическое смещение из-за смещения (плеча рычага).Как только это смещение устранено из входной информации о местоположении, величина смещения явно уменьшается, и наблюдается почти более 80% улучшения. Среднеквадратичное значение плоских координат составляет около 0,45 м в реальных ситуациях, и интерполированные и экстраполированные решения показывают схожие характеристики во всех статистических данных. Таким образом, вместо оценки условий смещения в отдельном процессе, как это делается в этом исследовании, можно дополнительно улучшить результаты, если они будут включены в модель глубокого обучения как систему. Самым важным вопросом при прогнозировании местоположения транспортного средства является точность и надежность решения. Сигнал GNSS иногда блокируется окружающей средой, например, небоскребами в городских районах или туннелями. Следовательно, проблема может быть решена путем создания модели для объединения данных IMU, а также бортовых датчиков. На рисунке 10 показаны потери и точность модели LSTM в каждую эпоху для проверки процессов обучения и тестирования. Как видно на рисунке, функция потерь быстро спадает и сходится к нулю, и, наоборот, точность приближается к 1.0 и продолжает оставаться. Таким образом, можно сделать вывод, что процесс обучения модели прошел правильно. 3.4. Обсуждение результатовВ качестве предварительного исследования по применению техники глубокого обучения для определения местоположения наземного транспортного средства, обычное абсолютное решение GNSS использовалось в качестве входных данных для целей обучения. Однако приемник GNSS был установлен отдельно от системы POSLV; таким образом, в результате сравнения неизбежно возникает смещение.Это виртуальное смещение, вызванное плечом рычага, было поглощено техникой глубокого обучения в этом исследовании (около 40%), независимо от интерполяции или экстраполяции скорости транспортного средства. После удаления смещения перед обучением модели было получено всего несколько дециметров ошибки, что имеет большое значение для автономной навигации наземных транспортных средств. Следует упомянуть, что эксперимент в этом исследовании проводился в ограниченной среде, то есть на небольшой парковке.Таким образом, существует множество факторов, которые необходимо учитывать при применении в реальных дорожных условиях, включая изменяющуюся скорость, быстрые и / или крутые повороты, а в неблагоприятных случаях — потерю сигналов GNSS из-за окружающей среды. Для общего применения нам необходимо защитить огромные данные для обучения, где информация об ускорении и вращении из данных IMU будет играть важную роль для сокращения времени и повышения производительности. Модель LSTM была применена к временным рядам данных навигации транспортного средства, чтобы отразить информацию в прошлом.Мы использовали только два скрытых слоя с 4 и 2 узлами для простоты, хотя для получения лучших результатов были применены многочисленные тренинги. Количество слоев и узлов на каждом уровне также должно быть оптимизировано, что все еще остается открытым вопросом в технике глубокого обучения. 4. ЗаключениеХотя большинство исследований техники глубокого обучения были сосредоточены на приложениях на основе изображений, в этом исследовании мы предложили интегрированный алгоритм навигации с различными датчиками (GNSS и бортовые датчики).Поскольку сама GNSS не предоставляет достаточно точную информацию о местоположении, необходимо предоставить дополнительную информацию для автономной навигации транспортных средств. Алгоритм глубокого обучения был изучен для проверки производительности и точности позиционирования на основе теории нейронных сетей. Вместо создания сложной математической модели для измерений был применен метод глубокого обучения для прогнозирования местоположения транспортного средства с целью повышения точности и расширяемости. Поскольку навигационные данные в основном представлены в виде временных рядов, был применен алгоритм LSTM. Датчик GNSS обеспечивает только RMSE около 3,8 м, что является результатом абсолютного позиционирования на основе данных псевдодальности. Когда положение GNSS было интерполировано с частотой 100 Гц, его выходной сигнал был улучшен примерно до 2,3 м с моделью LSTM (но доступной только в режиме постобработки). Даже в приложении реального времени с экстраполированным положением была получена сопоставимая точность без предварительной информации о смещении. MMS, используемый в этом исследовании, имеет возможное смещение из-за рычага датчика GNSS.Смещение было устранено с использованием обычного подхода LESS. После того, как смещение было удалено из входных данных, результаты модели LSTM были значительно улучшены до примерно 0,45 м, что почти идентично для обоих случаев интерполяции и экстраполяции. В этом исследовании сложная математическая модель не была настроена для каждого отдельного датчика, что дает высокую гибкость при интеграции различных типов датчиков для практического применения в будущей автономной навигации наземных транспортных средств.Хотя в этом исследовании был продемонстрирован большой прогресс, его все еще необходимо доработать, чтобы включить датчики с большим количеством функций в качестве входных данных и стратегию того, как сбалансировать вес между данными датчиков. Поскольку текущий эксперимент немного ограничен как по количеству, так и по структуре данных (например, сбор данных по одной и той же траектории), необходимо проводить эксперимент в реальных дорожных ситуациях с огромными обучающими данными. Кроме того, информация о смещении также должна быть интегрирована в модель для оценки во время процесса обучения, который, как ожидается, позволит создать более практичную модель прогнозирования для автономной навигации транспортного средства. Доступность данныхВсе данные, использованные для подтверждения выводов этого исследования, можно получить у соответствующего автора по запросу. | ||||||||||||||||||||||||||||||||||||||||||||||||||||