что такое, зачем нужна и как работает в современном автомобиле
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).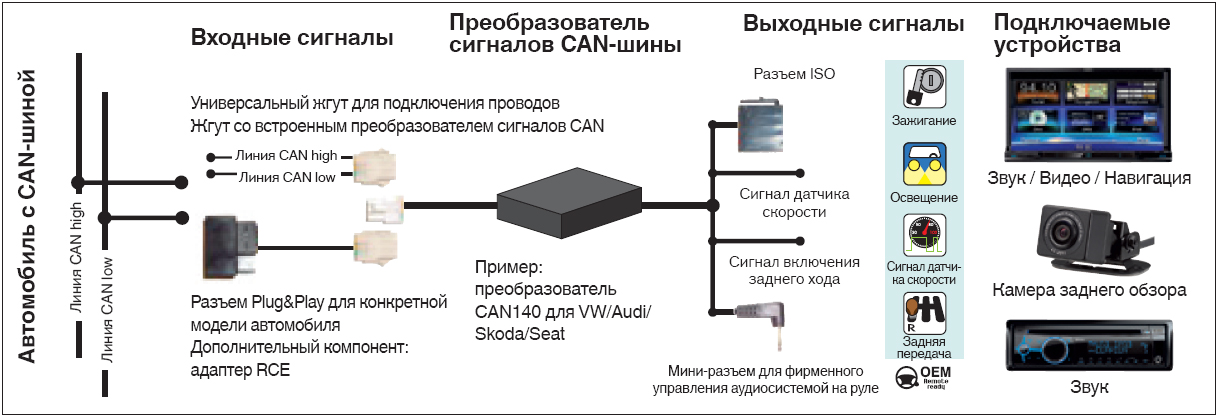
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.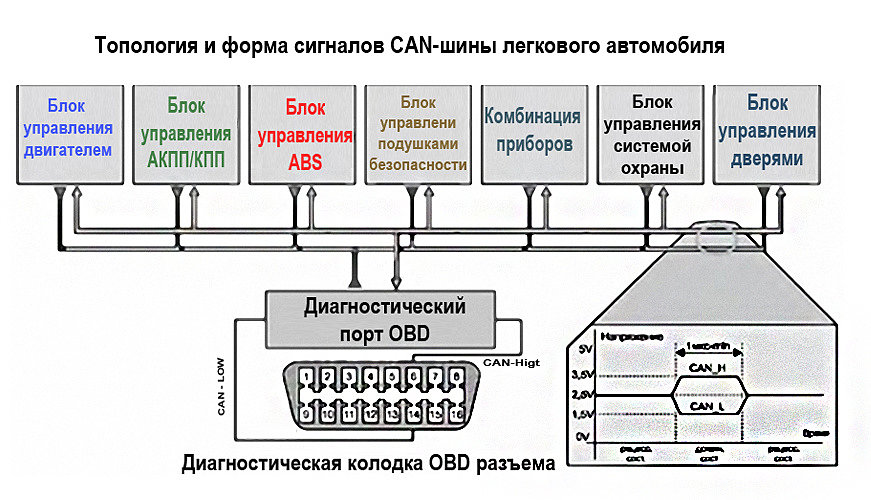
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.

Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
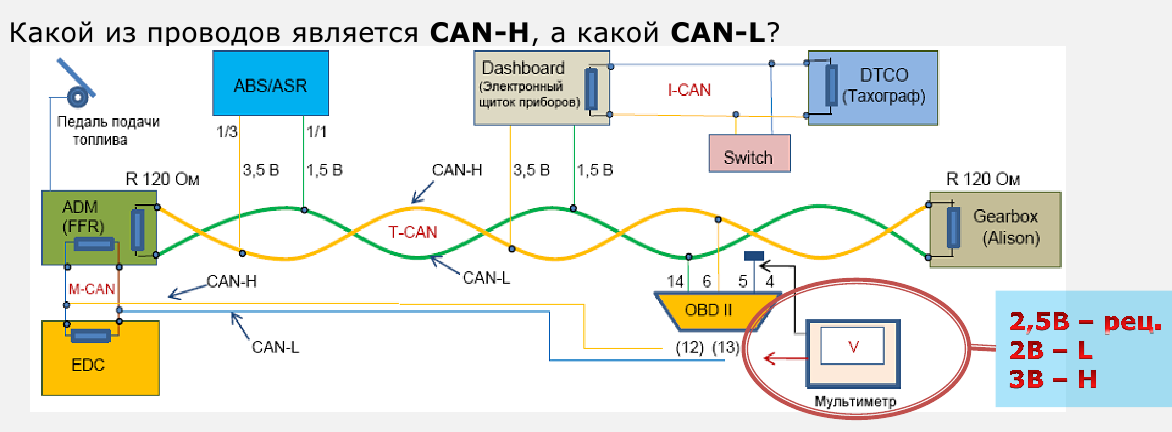
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).
Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:
Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:
Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.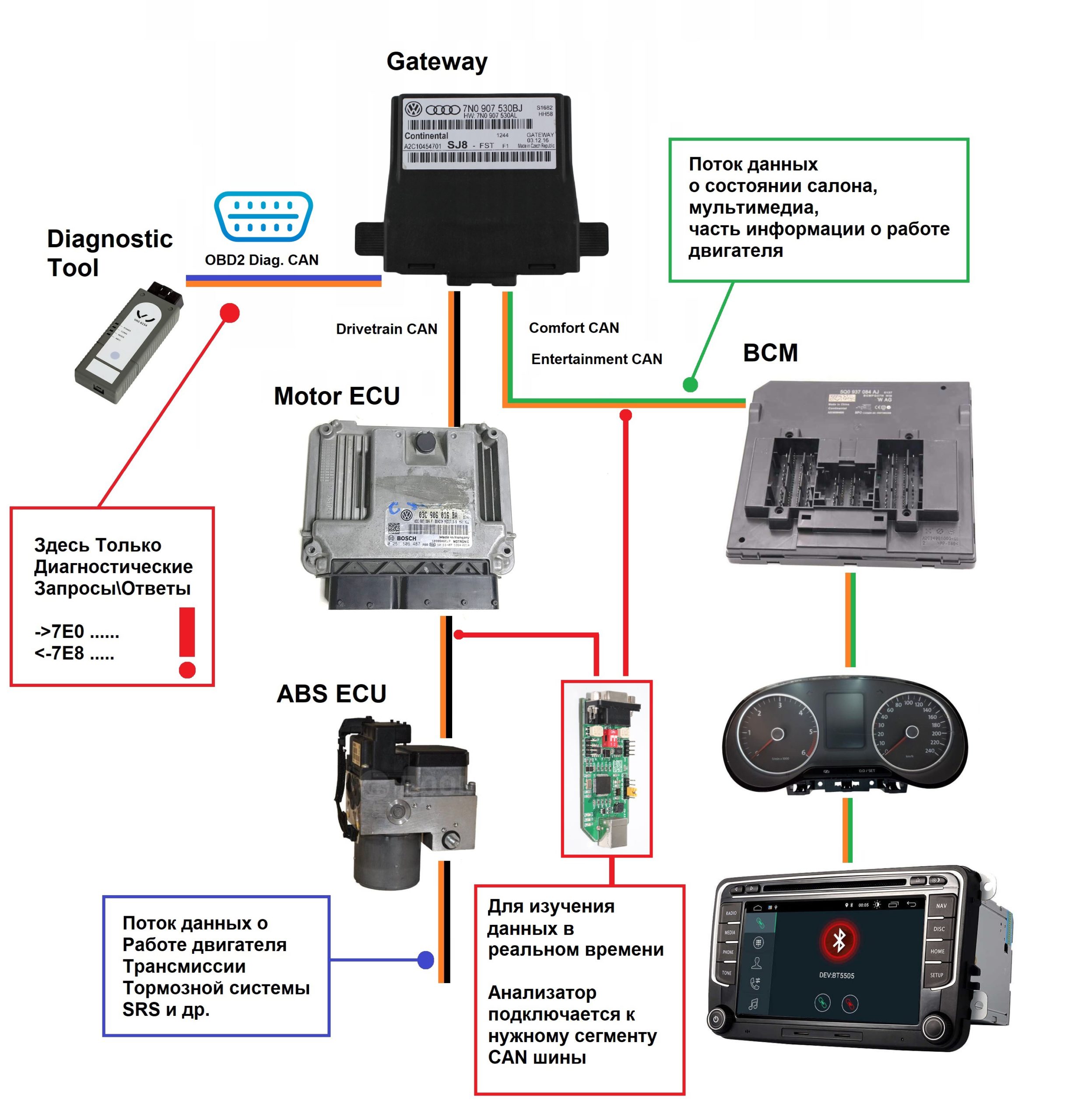
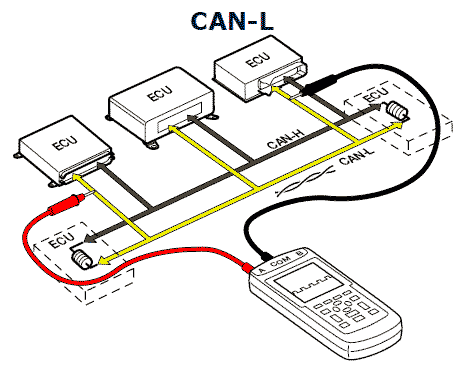
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.
«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.
Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.
Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.
Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем.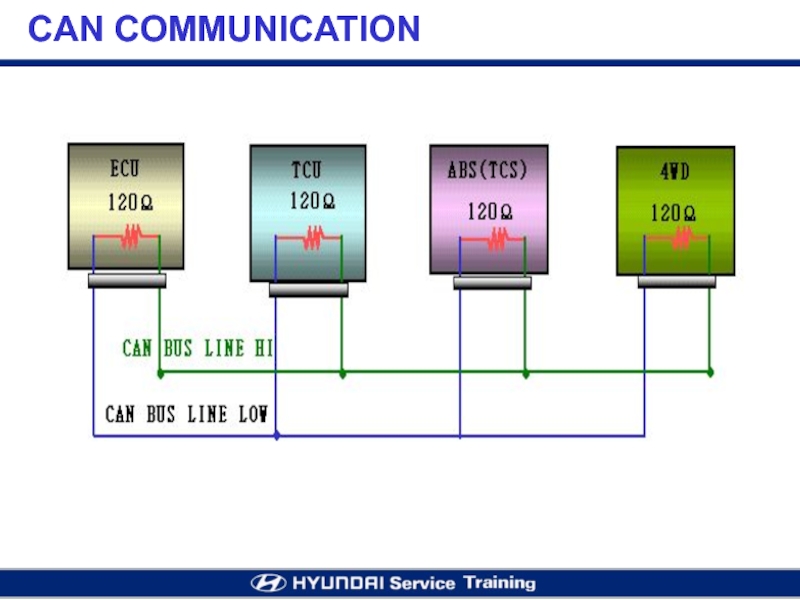 Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).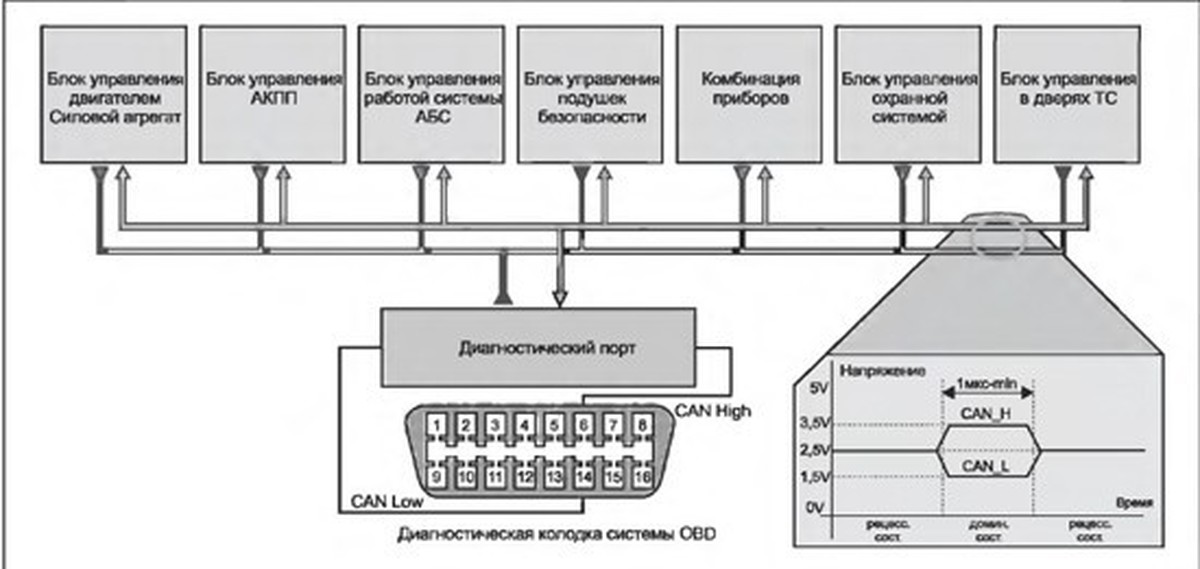
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Управление автомобилем по CAN / Хабр
Введение
Беспилотный автомобиль StarLine на платформе Lexus RX 450h — научно-исследовательский проект, стартовавший в 2018 году. Проект открыт для амбициозных специалистов из Open Source Community. Мы предлагаем всем желающим поучаствовать в процессе разработки на уровне кода, опробовать свои алгоритмы на реальном автомобиле, оснащенном дорогостоящим оборудованием. Для управления автомобилем было решено использовать Apollo, открытый фреймворк. Для работы Apollo нам необходимо было подключить набор модулей. Эти модули помогают программе получать информацию об автомобиле и управлять им по заданным алгоритмам.
К таким модулям относятся:
- модуль позиционирования автомобиля в пространстве с помощью GPS-координат;
- модуль управления рулем, ускорением и торможением авто;
- модуль состояния систем автомобиля: скорость, ускорение, положение руля, нажатие на педали и т.д.;
- модуль получения информации об окружении автомобиля. С этим справятся ультразвуковые датчики, камеры, радары и лидары.
Прежде всего перед нашей командой стояла задача научиться управлять рулем, ускорением и торможением автомобиля. А также получать информацию о состоянии систем автомобиля. Для этого была проведена большая работу по изучению CAN-шины Lexus.
Теоретическая часть
Что такое CAN-шина
В современных автомобилях управление всеми системами взяли на себя электронные блоки (Рис. 1.). Электронные блоки — это специализированные компьютеры, каждый из которых имеет все необходимые интерфейсы для интеграции с автомобилем.
CAN (Controller Area Network) шина — это промышленный стандарт сети. В 1986 году этот стандарт разработали в компании Bosch. А первым автомобилем с CAN-шиной стал Mercedes-Benz W140, выпущенный в 1991 году. Стандарт разрабатывался для возможности устройствам общаться друг с другом без хоста. Обмен информацией осуществляется с помощью специальных сообщений, которые состоят из полей ID, длины сообщения и данных. Каждый блок имеет свой набор ID. При этом приоритет на шине имеет сообщение с меньшим ID. Поле данных может нести информацию, например, о состоянии систем и датчиков, команды управления механизмами и т.д.
Рис. 1. Шина CAN автомобиля.
На физическом уровне шина представляет собой витую пару из медных проводников. Сигнал передается дифференциально, за счет чего достигается высокая помехоустойчивость.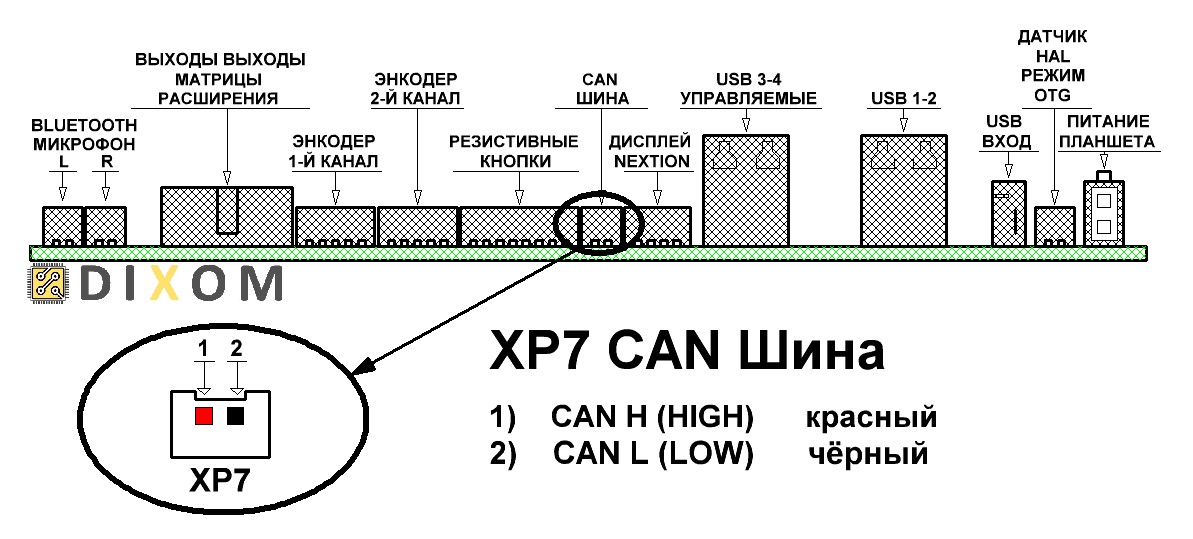
Рис. 2. Физическое представление сигнала в CAN шине
Посредством CAN шины можно получать информацию о состоянии различных датчиков и системах автомобиля. Также по CAN можно управлять узлами автомобиля. Именно эти возможности мы и используем для своего проекта.
Мы выбрали Lexus RX, потому что знали, что сможем управлять всеми необходимыми узлами по CAN. Так как самое сложное при исследовании автомобиля — это закрытые протоколы. Поэтому одной из причин выбора именно этой модели авто стало наличие описания части протокола CAN-шины в opensource-проекте Openpilot.
Правильно управлять автомобилем — означает понимать, как работают механические части систем автомобиля. Нам было необходимо хорошо понимать, как правильно работать с электроусилителем или управлять замедлением автомобиля. Ведь, например, при повороте колеса создают сопротивление на рулевое управление, что вносит свои ограничения на управление при повороте. Некоторые системы невозможно использовать без ввода авто в специальные рабочие режимы.![]()
Электроусилитель руля
Электроусилитель руля EPS (Electric Power Steering) — система, предназначенная снизить усилие на руль при повороте (Рис. 3). Приставка «электро» говорит о типе системы — электрическая. Управление рулем с этой системой становится комфортным, водитель поворачивает руль в нужном направлении, а электродвигатель помогает довернуть его до необходимого угла.
Электроусилитель устанавливается на рулевой вал автомобиля, части которого соединены между собой торсионным валом. На торсионный вал устанавливается датчик величины крутящего момента (Torque Sensor). При вращении руля происходит скручивание торсионного вала, которое регистрируется датчиком момента. Данные, полученные от датчика момента, датчиков скорости и оборотов коленвала, поступают в электронный блок управления ECU. А ECU, в свою очередь, уже вычисляет необходимое компенсационное усилие и подает команду на электродвигатель усилителя.
Рис. 3. Схематичное изображение системы электроусилителя руля
3. Схематичное изображение системы электроусилителя руля
Видео: cистема LKA рулит автомобилем с помощью системы EPS.
Электронная педаль газа
Дроссельная заслонка — это механизм регулировки количества топливной смеси, которая попадет в двигатель. Чем больше смеси попадет, тем быстрее едет автомобиль.
Электронная педаль газа — это система, которая задействует работу нескольких электронных узлов. Сигнал о положении педали, при ее нажатии, поступает в блок управления двигателем ECM (Engine Control Module). ECM, на основе этого сигнала, рассчитывает необходимое количество топлива, которое нужно подать в двигатель. В зависимости от необходимого количества топлива, ECM регулирует угол открытия дроссельной заслонки.
Рис. 4. Система электронной педали газа.
Видео: Для работы круиз-контроля используется управление электронной педалью газа.

Электронные системы помощи водителю
Мы купили автомобиль, который оборудован множеством цифровых блоков и систем помощи водителю (ADAS). В нашем проекте мы используем LKA, ACC и PCS.
LKA (Lane Keep Assist) — это система удержания в полосе, которая состоит из фронтальной камеры и вычислительного блока. LKA удерживает автомобиль в полосе движения, когда водитель, например, отвлекся. Алгоритмы в вычислительном блоке получают данные от камеры и на их основе принимают решение о состоянии автомобиля на дороге. Система способна понимать, что автомобиль неконтролируемо движется к правой или левой полосе. В таких случаях подается звуковой сигнал для привлечения внимания водителя. При пересечении полосы система сама скорректирует угол поворота колес так, чтобы автомобиль остался в полосе движения. Система должна вмешиваться только в том случае, если осознает, что маневр между полосами движения не был вызван действием водителя.
ACC (Adaptive Cruise Control) — система адаптивного круиз-контроля, который позволяет выставить заданную скорость следования.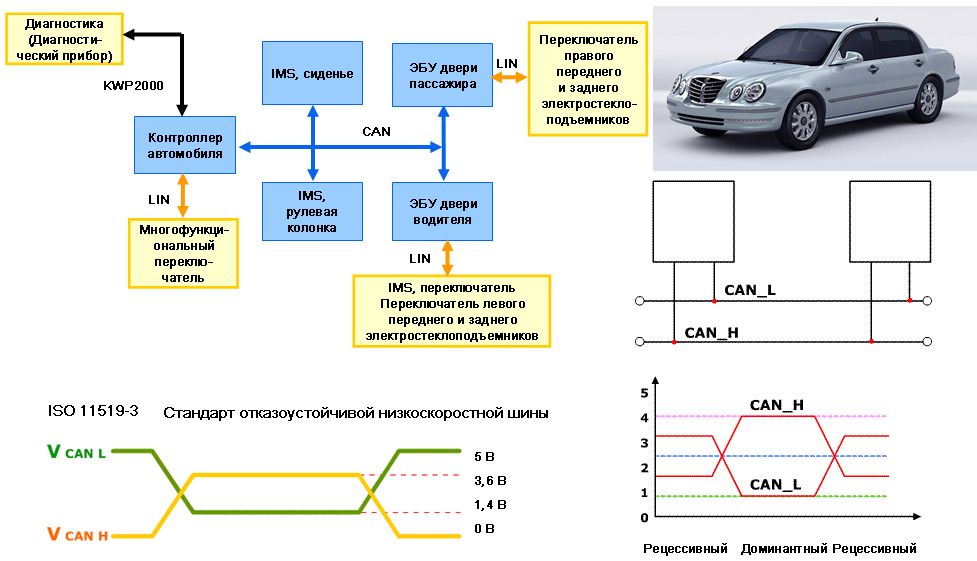
PCS (Pre-Collision System) — система предотвращения столкновения. Система призвана предотвратить столкновение с автомобилем, который движется впереди. При неизбежности столкновения, система минимизирует урон от столкновения. Здесь так же используются радар для оценки расстояния до объекта и фронтальная камера для его распознавания. Фронт PCS прогнозирует вероятность столкновения на основе скорости автомобиля, расстояния до объекта и его скорости. Обычно у системы есть два этапа срабатывания. Первый этап — система звуком и индикацией на приборной панели оповещает об опасности водителя. Второй этап — активируется экстренное торможение с помощью системы ABS, и включаются преднатяжители ремней безопасности.
Здесь так же используются радар для оценки расстояния до объекта и фронтальная камера для его распознавания. Фронт PCS прогнозирует вероятность столкновения на основе скорости автомобиля, расстояния до объекта и его скорости. Обычно у системы есть два этапа срабатывания. Первый этап — система звуком и индикацией на приборной панели оповещает об опасности водителя. Второй этап — активируется экстренное торможение с помощью системы ABS, и включаются преднатяжители ремней безопасности.
Практическая часть
Управление рулем
Первое, что захотелось сделать нашей команде, — это научиться рулить. Рулем в автомобиле могут управлять две системы: парковочный ассистент IPAS (Intelligent Park Assist) и LKA.
IPAS позволяет задавать напрямую угол поворота рулевого колеса в градусах. Так как в нашем автомобиле нет данной системы, проверить и освоить рулевое управление таким способом нельзя.
Поэтому мы изучили электрические схемы автомобиля и поняли, какие CAN-шины могут быть полезны.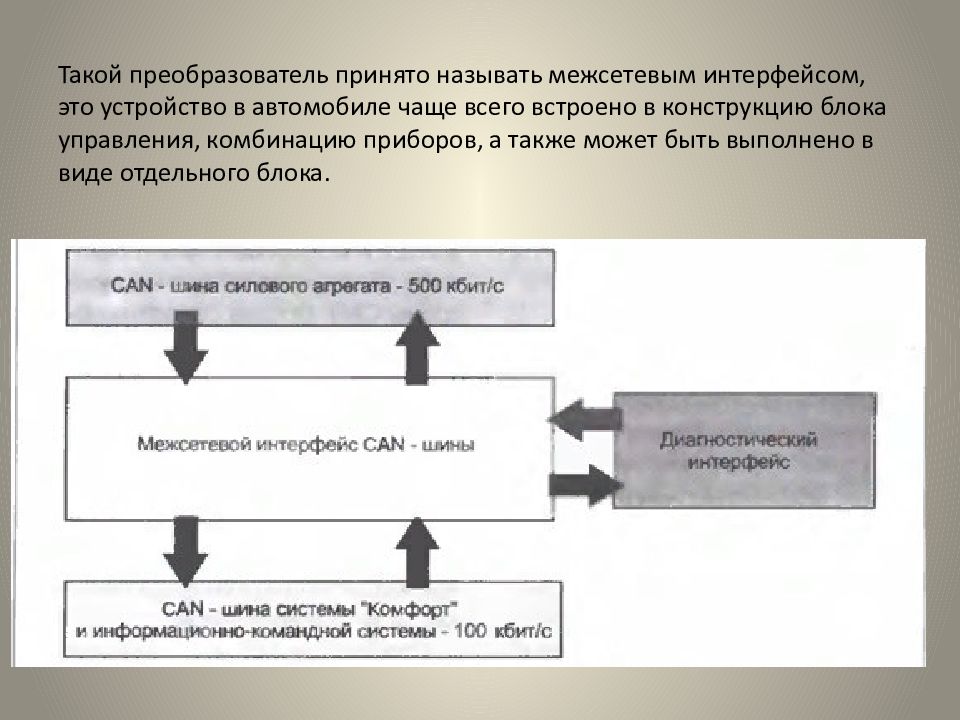
Поворот руля влево на 360 градусов
Поворот руля вправо на 270 градусов
Следующим этапом мы исследовали систему удержания в полосе. Для этого мы выехали на тихую улицу и записали логи обмена между блоком удержания в полосе и DSU (Driving Support ECU). С помощью анализатора шины CAN нам удалось вычислить сообщения от системы LKA. На рисунке 6 изображена команда управления EPS.
Рис. 5. Команда управления рулем с помощью системы LKA
LKA управляет рулем путем задания значения момента на валу (STEER_TORQUE_CMD) рулевого колеса. Команду принимает модуль EPS. Каждое сообщение содержит в заголовке значение счетчика (COUNTER), которое инкрементируется при каждой отправке. Поле LKA_STATE содержит информацию о состоянии LKA. Для захвата управления необходимо выставлять бит STEER_REQUEST.
Команду принимает модуль EPS. Каждое сообщение содержит в заголовке значение счетчика (COUNTER), которое инкрементируется при каждой отправке. Поле LKA_STATE содержит информацию о состоянии LKA. Для захвата управления необходимо выставлять бит STEER_REQUEST.
Сообщения, которые отвечают за работу важных систем авто, защищаются контрольной суммой (CHECKSUM) для минимизации рисков ложного срабатывания. Автомобиль проигнорирует такую команду, если сообщение содержит некорректную контрольную сумму или значение счетчика. Это встроенная производителем защита от вмешательств сторонних систем и помех в линии связи.
На графике (Рис. 6.) представлена диаграмма работы LKA. Torque Sensor — значение с датчика момента на торсионном валу. Torque Cmd — команда от LKA для управления рулем. Из картинки видно, как происходит подруливание LKA для удержания автомобиля в полосе. При переходе через ноль меняется направление поворота руля. Т.е. отрицательное значение сигнала говорит о повороте вправо, положительное — влево. Удержание команды в нуле говорит об отсутствии управления со стороны LKA. При вмешательстве водителя, система перестает выдавать управление. О вмешательстве водителя LKA узнает с помощью второго датчика момента на валу со стороны рулевого колеса.
Удержание команды в нуле говорит об отсутствии управления со стороны LKA. При вмешательстве водителя, система перестает выдавать управление. О вмешательстве водителя LKA узнает с помощью второго датчика момента на валу со стороны рулевого колеса.
Рис. 6. График работы системы LKA
Нам предстояло проверить работу команды управления рулем. С помощью модуля StarLine Сигма 10 мы подготовили прошивку для проверки управления. StarLine Сигма 10 должен выдавать в CAN-шину команды на поворот руля влево или вправо. На тот момент у нас не было графического интерфейса для управления модулем, поэтому пришлось использовать штатные средства автомобиля. Мы нашли в CAN-шине статус положения рычага круиз-контроля и запрограммировали модуль таким образом, что верхнее положение рычага приводило к повороту руля вправо, нижнее положение — к повороту влево (Рис. 7).
Рис. 7. Первые попытки рулить
На видео видно, что управление осуществляется короткими секциями. Это возникает по нескольким причинам.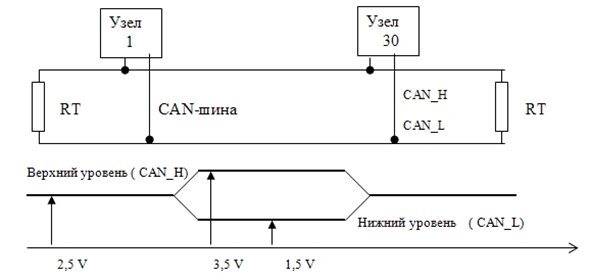
Первая из причин — это отсутствие обратной связи. Если расхождение между сигналом Torque Cmd и Torque Sensor превышает определенное значение Δ, система автоматически перестает воспринимать команды (Рис. 8). Мы настроили алгоритм на корректировку выдаваемой команды (Torque CMD) в зависимости от значения момента на валу (Torque Sensor).
Рис. 8. Расхождение сигнала приводит к ошибке работы системы
Следующее ограничение связано с системой защиты встроенной в EPS. Система EPS не позволяет командами от LKA рулить в широком диапазоне. Что вполне логично, т.к. при езде по дороге резкое маневрирование не безопасно. Таким образом, при превышении порогового значения момента на валу, система LKA выдает ошибку и отключается (Рис. 9).
Рис. 9. Превышение порогового значения регулировки момента на валу
Независимо от того, активирована система LKA или нет, сообщения с командами от нее присутствуют в шине постоянно. Мы посылаем модулю EPS команду повернуть колеса с конкретным усилием влево или вправо. А в это время LKA перебивает наши посылки «пустыми» сообщениями. После нашей команды со значением момента, приходит штатная с нулевым (Рис. 10).
А в это время LKA перебивает наши посылки «пустыми» сообщениями. После нашей команды со значением момента, приходит штатная с нулевым (Рис. 10).
Рис. 10. Штатные сообщения приходят с нулевыми значениями момента и перебивают наше управление
Тогда мы, с помощью модуля StarLine Сигма 10, смогли фильтровать весь трафик от LKA и блокировать сообщения с ID 2E4, когда нам это было нужно. Это решило проблему, а нам удалось получить плавное управления рулем (Рис. 11).
Рис. 11. Плавная регулировка поворота руля без ошибок
Управление газом
Система адаптивного круиз-контроля ACC управляет ускорением и торможением программно по CAN-шине. Блок управления двигателем ECU принимает команды DSU, если необходимо ускориться — активирует электронную педаль газа. Для торможения автомобиля используется рекуперативное торможение. При этом на торможение и ускорение используется одна команда, отличаются только значения.
Команда управления ускорением или замедлением представлена на рисунке 12.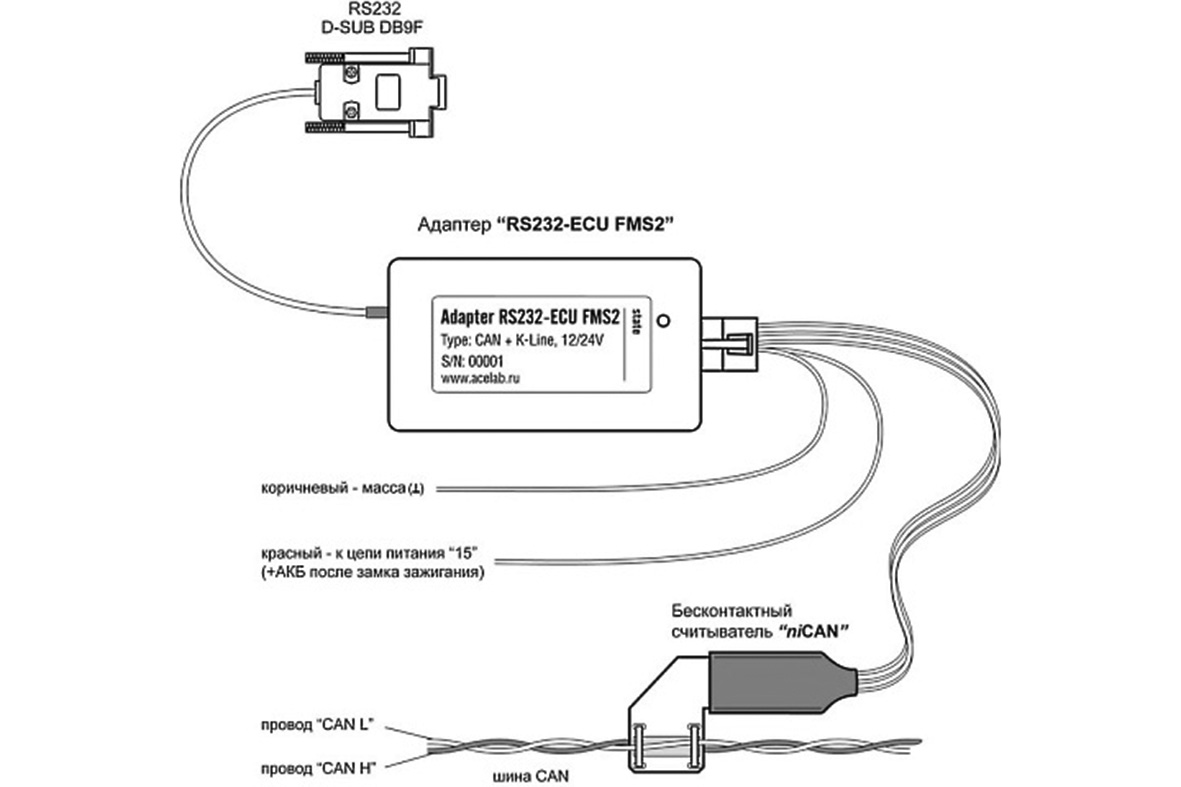 2, ACCEL_CMD = 1000 (0x03E8).
2, ACCEL_CMD = 1000 (0x03E8).
Рис. 12. Команда управления ускорения/замедления автомобиля
Мы сняли логи со штатной системы ACC и проанализировали команды. Сравнили с имеющимся у нас описанием команд и приступили к тестированию.
Рис. 13. Лог управления ускорением/замедлением системы адаптивного круиз-контроля ACC (выделено маркером)
Здесь не обошлось без трудностей. Мы выехали на дорогу с оживленным трафиком для тестирования команды ускорения. Команды управления ускорением или замедлением автомобиля работают только при активированном круиз контроле, не достаточно активировать его кнопкой. Необходимо найти движущийся впереди автомобиль и включить режим следования за ним.
Рис. 14. Активация круиз контроля происходит при наличии впереди другого траснпортного средства
С помощью модуля StarLine Сигма 10 посылаем команду ускорения, и автомобиль начинает набирать скорость. К этому моменту мы подключили графический интерфейс для управления модулем StarLine Сигма 10. Теперь мы управляем рулем, ускорением и торможением с помощью кнопок в приложении.
Теперь мы управляем рулем, ускорением и торможением с помощью кнопок в приложении.
Команды работали до тех пор, пока не потеряли автомобиль впереди. Система круиз-контроля отключилась, а следовательно, и команды ускорения перестали работать.
Мы приступили к исследованию возможности использовать команды без активного круиз-контроля. Пришлось много времени потратить на анализ данных в шине CAN, чтобы понять как создать условия для работы команд. Нас интересовало, в первую очередь, какой блок блокирует выполнение команд ACC на ускорение или замедление. Пришлось изучить какие ID идут от DSU, LKA, радара и камеры, подсовывая липовые данные различных датчиков.
Решение пришло спустя 3 недели. К тому времени мы представляли как происходит взаимодействие блоков автомобиля, провели исследование трафика сообщений и выделили группы сообщений, посылаемых каждым блоком. За работу адаптивного круиз-контроля ACC отвечает блок Driving Support ECU (DSU). DSU выдает команды на ускорение и замедление автомобиля, и именно этот блок получает данные от радара миллиметрового диапазона. Радар сообщает DSU на каком расстоянии от машины движется объект, с какой относительной скоростью и определяет его положение по горизонтали (левее, правее или по центру).
Радар сообщает DSU на каком расстоянии от машины движется объект, с какой относительной скоростью и определяет его положение по горизонтали (левее, правее или по центру).
Наша идея заключалась в подмене данных радара. Мы сняли лог следования за автомобилем, вытащили из него данные радара в момент следования. Теперь, после включения круиз-контроля, мы посылаем фейковые данные о наличии впереди идущего авто. Получается обманывать наш автомобиль, говоря что впереди движется другое авто на конкретном расстоянии.
a) б)
Рис. 15. Активация круиза: a) попытка активировать без подмены данных радара; б) активация при подмене данных от радара.
Когда запускаем нашу обманку, на приборной панели загорается значок наличия впереди идущего автомобиля. Теперь мы можем тестировать наше управление. Запускаем команду на ускорение, и автомобиль начинает быстро ускоряться.
Как мы уже узнали, команда на ускорение и замедление одна. Поэтому тут же проверили и замедление. Поехали на на скорости с активным круиз-контролем, запустили команду на торможение, и авто сразу же замедлилось.
В итоге сейчас получается разгонять и замедлять автомобиль именно так, как нам было нужно.
Цель достигнута.
Что еще мы используем
Для создания беспилотника необходимо управление вспомогательными системами: поворотниками, стоп-сигналами, аварийной сигнализацией, клаксоном и пр. Всем этим так же можно управлять по CAN шине.
Оборудование и ПО
Для работ с автомобилем сегодня мы используем набор различного оборудования:
- Анализатор шины Marathon позволяет подключать и читать данные с двух шин одновременно. На сайте производителя анализатора есть бесплатное ПО для анализа логов. Но мы используем ПО, написанное в нашей компании для внутреннего пользования.
- Модуль StarLine Сигма 10 мы используем как платформу для работы с цифровыми интерфейсами. Модуль поддерживает CAN и LIN интерфейсы. При исследовании автомобиля пишем программы на C, зашиваем их в модуль и проверяем работу. Из модуля можем сделать сниффер трафика CAN-шины. Сниффер нам помогает понять, какие ID идут от блока или блокировать сообщения от штатных систем.
- Диагностическое оборудование Toyota/Lexus. С помощью этого оборудования можно найти команды управления системами автомобиля: поворотниками, стоп-сигналами, клаксоном, индикацией приборки.
Сегодня ведется активная работа по разработке беспилотного автомобиля, в ближайших планах реализация экстренного торможения перед препятствиями, их объезда и перестраивание маршрута автомобиля в зависимости от дорожной ситуации и указаний водителя.
Беспилотный автомобиль StarLine — это открытая площадка для объединения лучших инженерных умов России и мира с целью создания прогрессивных технологий беспилотного вождения, которые сделают наше будущее безопасным и комфортным.
GitLab проекта
Как работает can шина. Что такое CAN шина автомобиля
Чтобы связно и гармонично управлять системами, обеспечить качество и функциональность передачи данных, многие автомобилестроительные компании применяют современную систему, известную как CAN-шина. Принцип ее организации заслуживает подробного рассмотрения.
Общая характеристика
Визуально CAN-шина выглядит как асинхронная последовательность. Ее информация передается по двум витым проводникам, радиоканалу или оптоволокну.
Управлять шиной способны несколько устройств одновременно. Их количество не ограничено, а скорость обмена информацией запрограммирована до 1 Мбит/с.
CAN-шина в современных автомобилях регламентируется спецификацией «CAN Sorcjfication version 2,0».
Он состоит из двух разделов. Протокол А описывает передачу информации с применением 11-битной системы передачи данных. Часть В выполняет эти функции при применении 29-битного варианта.
CAN имеет узлы персональных тактовых генераторов. Каждый из них посылает сигналы всем системам одновременно. Получающие устройства, присоединенные к шине, определяют, относится ли сигнал к их компетенции. Каждая система обладает аппаратной фильтрацией адресованных ей посланий.
Разновидности и маркировка
Одной из самых известных на сегодняшний день является разработанная Робертом Бошем CAN-шина. CAN BUS (под таким названием известна система) бывает последовательная, где импульс подается за импульсом. Она называется Serial bus. Если же информация передается по нескольким проводам, то это параллельная шина Parallel bus.
CAN BUS (под таким названием известна система) бывает последовательная, где импульс подается за импульсом. Она называется Serial bus. Если же информация передается по нескольким проводам, то это параллельная шина Parallel bus.
I — узлы управления;
II — коммуникации системы.
Опираясь на разновидности идентификаторов КАН-шин, встречается маркировка двух типов.
В случае, когда узел поддерживает 11-битный формат обмена информацией и не обозначает ошибки на сигналы 29-битного идентификатора, его маркируют «CAN2,0A Active, CAN2,0B Passive».
Когда таковые генераторы используют оба типа идентификаторов, шина имеет маркировку «CAN2,0B Active».
Встречаются узлы, поддерживающие коммуникации в 11-битном формате, а увидев в системе 29-битный идентификатор, выдают сообщение об ошибке. В современных автомобилях подобные CAN-шины не используются, ведь система должна быть логичной и согласованной.
Система же функционирует при двух типах скоростей передачи сигналов — 125, 250 кбит/с. Первые предназначены для вспомогательных устройств (стеклоподъемники, освещение), а вторые обеспечивают главное управление (коробка-автомат, двигатель, ABS).
Первые предназначены для вспомогательных устройств (стеклоподъемники, освещение), а вторые обеспечивают главное управление (коробка-автомат, двигатель, ABS).
Передача сигналов
Физически проводник CAN-шины современного автомобиля выполнен из двух составляющих. Первый — черного цвета и называется CAN-High. Второй проводник, оранжево-коричневый, именуется CAN-Low. Благодаря представленной структуре коммуникаций из схемы автомобиля удалена масса проводников. При производстве транспортных средств это позволяет уменьшить вес изделия до 50 кг.
Общая сетевая нагрузка состоит из разрозненных сопротивлений блоков, которые входят в состав протокола, называемого КАН-шина.
Различны и скорости передачи-получения каждой системы. Поэтому обеспечивается обработка разнотипных сообщений. Согласно описанию шины-CAN, эту функцию выполняет преобразователь сигналов. Он называется межсетевым электронным интерфейсом.
Расположен этот прибор в конструкции управляющего блока, но бывает выполнен в виде обособленного прибора.
Представленный интерфейс применяют также для вывода и ввода сигналов диагностического характера. Для этого предусмотрено наличие унифицированной колодки OBD. Это особый разъем для диагностики системы.
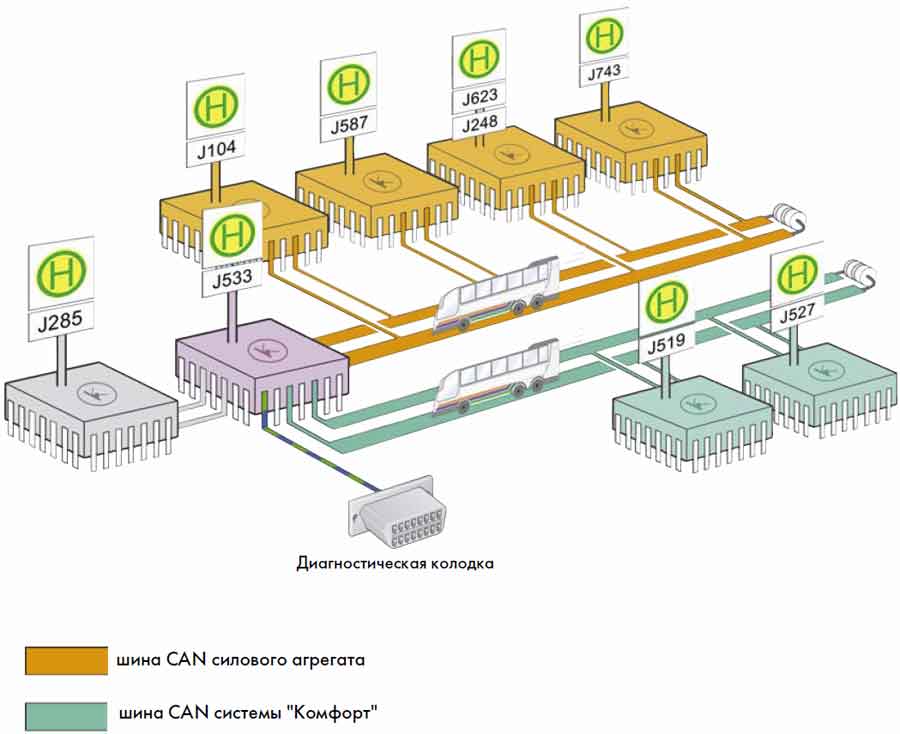
Разновидности функций шин
Существуют разные типы представленного устройства.
- КАН-шина агрегата силового. Это быстрый канал, который передает послания со скоростью 500 кбит/с. Его главная задача заключается в коммуникации блоков управления, например трансмиссия-двигатель.
- Система «Комфорт» — более медлительный канал, передающий данные со скоростью 100 кбит/с. Он связывает все устройства системы «Комфорт».
- Информационно-командная программа шины также передает сигналы медленно (100 кбит/с). Ее основное предназначение — обеспечить связь между обслуживающими системами, например телефоном и навигацией.
При изучении вопроса, чем является CAN-шина, может показаться, что по количеству программ она похожа на систему самолета. Однако, дабы обеспечить качество, безопасность и комфорт при управлении автомобилем, никакие программы не будут лишними.
Помехи в шине
Все управляющие блоки присоединены к CAN-шине трансиверами. Они имеют приемники сообщений, представляющих собой избирательные усилители.
Описание шины CAN оговаривает поступление посланий по проводникам High и Low в усилитель дифференциальный, где он обрабатывается и направляется в блок управления.
Усилитель определяет этот выходной сигнал как разность напряжений проводов High и Low. Такой подход позволяет исключить влияние внешних помех.
Чтобы понять, что собой представляет КАН-шина и ее устройство, следует вспомнить ее облик. Это два проводника, скрученные между собой.
Так как сигнал помехи поступает сразу на оба провода, в процессе обработки значение напряжения Low отнимается от напряжения High.
Благодаря этому CAN-шина считается надежной системой.
Типы сообщений
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
I — CAN-шина;
II — резистор сопротивления;
III — интерфейс.
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Функциональность системы
Чтобы понять, что такое CAN-шина, следует разобраться в ее функциональном назначении.
Она призвана передавать фреймы в реальном времени, которые содержат информацию о значении (например, перемена скорости) или о возникновении события от одного узла-передатчика к приемникам программы.
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Ключевое значение придается переменной показателя. Если в сообщении нет данных о времени, тогда это сообщение принимается системой по факту его получения.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Разрешение конфликтов на шине
Когда сигналы, поступающие на шину, приходят на несколько контроллеров, система выбирает, в какой очередности будет обработан каждый. Два или более устройства могут начать работу практически одновременно. Чтобы при этом не возник конфликт, производится мониторинг. CAN-шина современного автомобиля производит эту операцию в процессе отправки сообщения.
Существует градация сообщений по приоритетной и рецессивной градации. Информация, имеющая самое низкое числительное выражение поля арбитража, выиграет при наступлении конфликтного положения на шине. Остальные передатчики постараются отослать свои фреймы позже, если ничего не изменится.
В процессе передачи информации время, указанное в нем, не теряется даже при наличии конфликтного положения системы.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
Чтобы понять, что такое КАН-шина, следует изучить ее компоненты. Максимальная длина проводника при скорости 1 Мбит/с достигает 40 м. Шина- CAN (известная еще как CAN-BUS) в конце наделена терминатором.
Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом. Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Технология iCAN
Рассматривая шины транспортного средства, следует уделить внимание программе блокировки работы двигателя.
Для этого разработан обмен данными посредством шины CAN, iCAN-модулем. Он подключается к цифровой шине и отвечает за соответствующую команду.
Имеет небольшие габариты и присоединяется к любому отделению шины. При старте движения автомобиля iCAN посылает команду соответствующим блокам, и мотор глохнет.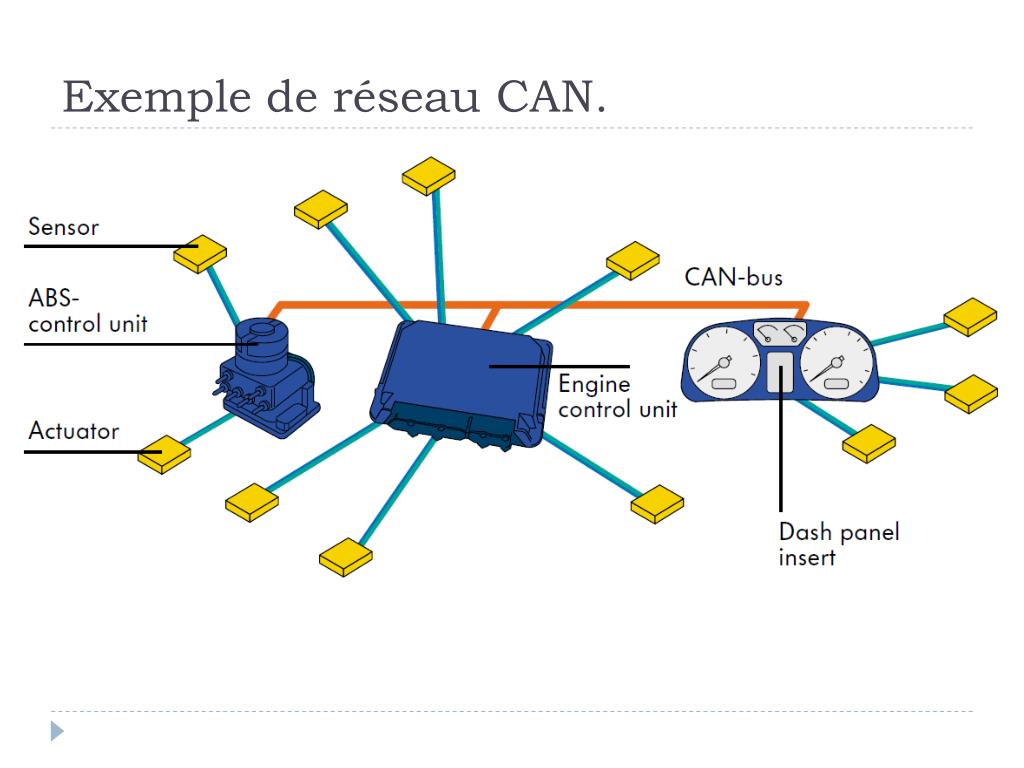 Преимуществом данной программы является отсутствие разрыва сигнала. Существует инструктирование электронного блока, после этого сообщение отключает функционирование соответствующих исполнительных элементов.
Преимуществом данной программы является отсутствие разрыва сигнала. Существует инструктирование электронного блока, после этого сообщение отключает функционирование соответствующих исполнительных элементов.
Этот тип блокировки характеризуется наивысшей скрытностью, а потому и надежностью. При этом ошибки не записываются в память ЭБУ. CAN-шина предоставляет всю информацию о скорости, движении автомобиля данному модулю.
Защита от угона
Модуль iCAN устанавливается в каком угодно узле, где расположены жгуты, в месте установки шины. Из-за минимальных габаритов и особого алгоритма действий выявить блокировку обычными методами при совершении угона практически нереально.
Внешне этот модуль маскируется под разные контролирующие датчики, что также делает невозможным его обнаружение. При желании возможно настроить работу прибора для автоматической защиты им стекол автомобиля, зеркал.
При наличии у транспортного средства автозапуска двигателя, iCAN не помешает его работе, так как срабатывает при старте движения.
Ознакомившись с устройством и принципами обмена данными, которой наделена CAN-шина, становится понятным, почему все современные автомобили применяют эти технологии при разработке управления транспортным средством.
Представленная технология по своему устройству довольно сложна. Однако все заложенные в нее функции обеспечат максимально эффенктивное, безопасное и комфортное управление автомобилем.
Существующие разработки помогут обеспечить защиту транспортного средства даже от угона. Благодаря этому, а также комплексу других фунций, шина-CAN популярна и востребована.
Бортовая электроника современного автомобиля в своем составе имеет большое количество исполнительных и управляющих устройств. К ним относятся всевозможные датчики, контроллеры и т.д.
Для обмена информацией между ними требовалась надежная коммуникационная сеть.
В середине 80-х годов прошлого столетия компанией BOSCH была предложена новая концепция сетевого интерфейса CAN (Controller Area Network).
CAN-шина обеспечивает подключение любых устройств, которые могут одновременно принимать и передавать цифровую информацию (дуплексная система). Собственно шины представляет собой витую пару. Данная реализация шина позволила снизить влияние внешних электромагнитных полей, возникающих при работе двигателя и других систем автомобиля. По такой шине обеспечивается достаточно высокая скорость передачи данных.
Как правило, провода CAN-шины оранжевого цвета, иногда они отличаются различными цветными полосами (CAN-High — черная, CAN-Low — оранжево-коричневая).
Благодаря применению данной системы из состава электрической схемы автомобиля высвободилось определенное количество проводников,которые обеспечивали связь, например, по протоколу KWP 2000 между контроллером системы управления двигателем и штатной сигнализацией, диагностическим оборудованием и т.д.
Скорость передачи данных по CAN-шине может достигать до 1 Мбит/с, при этом скорость передачи информации между блоками управления (двигатель — трансмиссия, ABS — система безопасности) составляет 500 кбит/с (быстрый канал), а скорость передачи информации системы «Комфорт» (блок управления подушками безопасности, блоками управления в дверях автомобиля и т. д.), информационно-командной системы составляет 100 кбит/с (медленный канал).
д.), информационно-командной системы составляет 100 кбит/с (медленный канал).
На рис. 1 показана топология и форма сигналов CAN-шины легкового автомобиля.
При передаче информации какого-либо из блоков управления сигналы усиливаются приемо-передатчиком (трансивером) до необходимого уровня.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN. Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов. Так, например, сопротивление блоков управления, подключенных к CAN-шине силового агрегата, в среднем составляет 68 Ом, а системы «Комфорт» и информационно-командной системы — от 2,0 до 3,5 кОм.
Следует учесть, что при выключении питания происходит отключение нагрузочных сопротивлений модулей, подключенных к CAN-шине.
На рис. 2 показан фрагмент CAN-шин с распределением нагрузки в линиях CAN-High, CAN-Low.
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.
Для решения данной технической проблемы используется преобразователь для связи между шинами.
Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Также интерфейс используется для ввода и вывода диагностической информации, запрос которой реализуется по проводу «К», подключенному к интерфейсу или к специальному диагностическому кабелю CAN-шины.
В данном случае большим плюсом в проведении диагностических работ является наличие единого унифицированного диагностического разъема (колодка OBD).
На рис. 3 показана блок-схема межсетевого интерфейса.
Следует учесть, что на некоторых марках автомобилей, например, на Volkswagen Golf V, CAN-шины системы «Комфорт» и информационно-командная система не соединены межсетевым интерфейсом.
В таблице представлены электронные блоки и элементы, относящиеся к CAN-шинам силового агрегата, системы «Комфорт» и информационно-командной системы. Приведенные в таблице элементы и блоки по своему составу могут отличаться в зависимости от марки автомобиля.
Приведенные в таблице элементы и блоки по своему составу могут отличаться в зависимости от марки автомобиля.
Диагностика неисправностей CAN-шины производится с помощью специализированной диагностической аппаратуры (анализаторы CAN-шины) осциллографа (в том числе, со встроенным анализатором шины CHN) и цифрового мультиметра.
Как правило работы по проверке работы CAN-шины начинают с измерения сопротивления между проводами шины. Необходимо иметь в виду, что CAN-шины системы «Комфорт» и информационно-командной системы, в отличие от шины силового агрегата, постоянно находятся под напряжением, поэтому для их проверки следует отключить одну из клемм аккумуляторной батареи.
Основные неисправности CAN-шины в основном связаны с замыканием/обрывом линий (или нагрузочных резисторов на них), снижением уровня сигналов на шине, нарушениями в логике ее работы. В последнем случае поиск дефекта может обеспечить только анализатор CAN-шины.
CAN-шины современного автомобиля
- CAN шина силового агрегата
- Электронный блок управления двигателя
- Электронный блок управления КПП
- Блок управления подушками безопасности
- Электронный блок управления АБС
- Блок управления электроусилителя руля
- Блок управления ТНВД
- Центральный монтажный блок
- Электронный замок зажигания
- Датчик угла поворота рулевого колеса
- CAN-шина системы «Комфорт»
- Комбинация приборов
- Электронные блоки дверей
- Электронный блок контроля парковочной
Системы
- Блок управления системы «Комфорт»
- Блок упрввления стеклоочистителей
- Контроль давления в шинах
CAN-шина информационно-командной системы
- Комбинация приборов
- Система звуковоспроизведения
- Информационная система
- Навигационная система
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.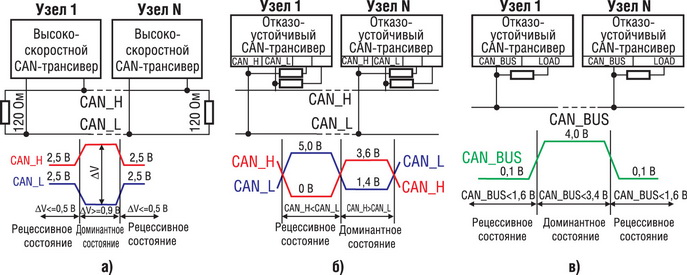
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт : на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.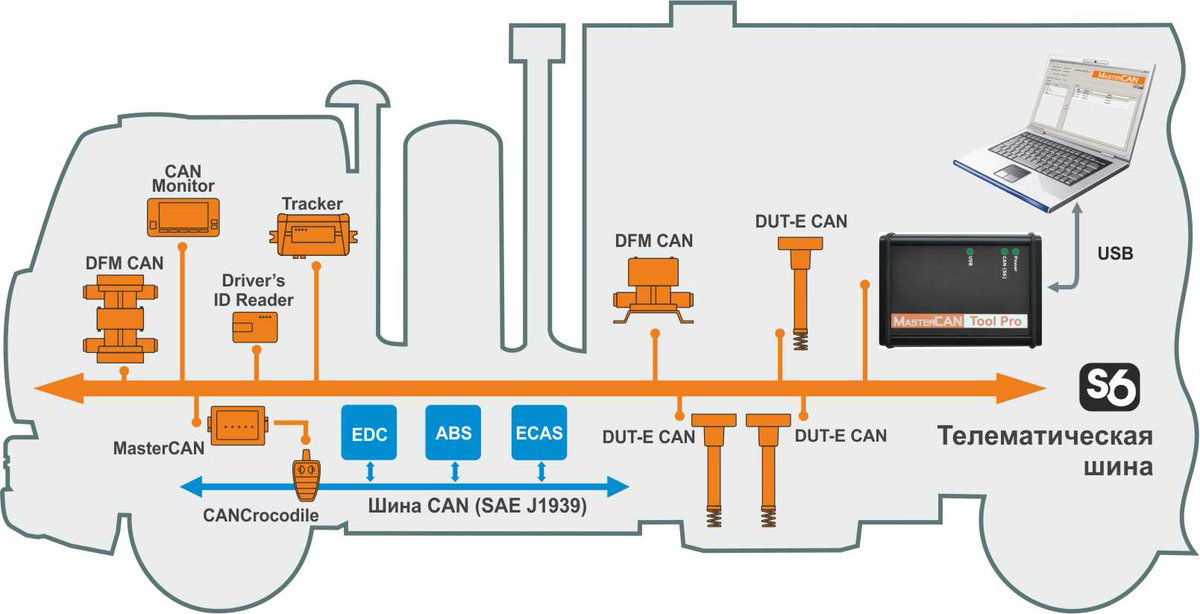
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).
Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:
Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:
Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.
«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.
Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.
Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой.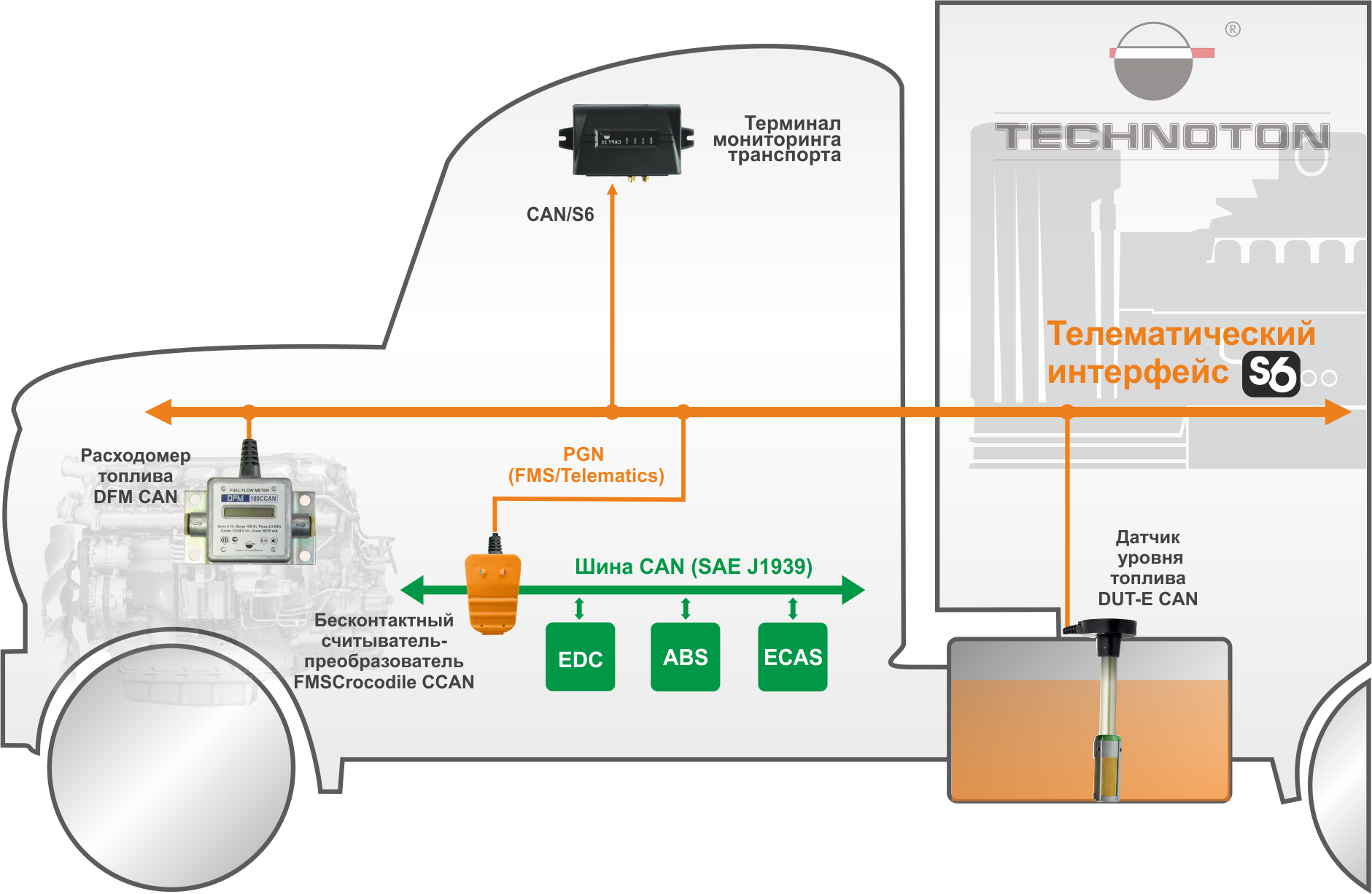 Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний ) способны не только «повесить» ошибку CAN-шины, обнаруживаемую , но и заполнить память контроллеров спорадическими ошибками, случайного характера.
Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний ) способны не только «повесить» ошибку CAN-шины, обнаруживаемую , но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.
Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем.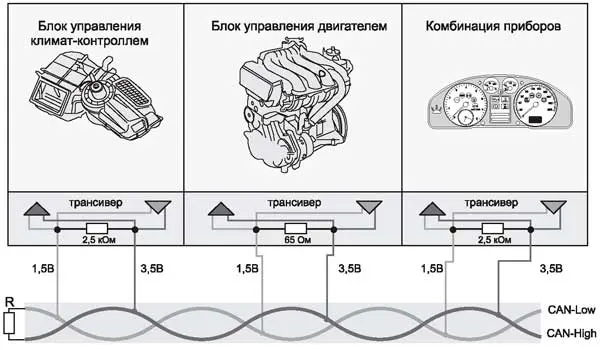 Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Задача: Получить доступ к показаниям штатных датчиков автомобиля без установки дополнительных. Решение: Считывание данных с автомобиля.Когда заходит речь о мониторинге таких параметров, как скорость транспортного средства и расход топлив а, надежным и отработанным решением является установка автотрекера и датчика уровня топлива.
Если же необходим доступ к такой информации, как обороты двигателя, пробег, температура охлаждающей жидкости и другим данным с бортового компьютера — эта задача уже больше похожа на творческую.
Казалось бы, что может быть логичнее: если в автомобиле уже есть все необходимые датчики, то зачем устанавливать новые? Практически все современные автомобили (особенно, если речь идет о личных автомобилях бизнес-класса и дорогостоящей спецтехнике) штатно оборудованы датчиками, информация с которых поступает в бортовой компьютер.
Вопрос состоит только в том, как получить доступ к этой информации. Долгое время эта задача оставалась нерешенной. Но сейчас на рынке спутникового мониторинга работает все больше высококвалифицированных инженеров, которым все-таки под силу найти решение задачи корректного получения таких данных, как:
- обороты двигателя;
- уровень топлива в баке;
- пробег автомобиля;
- температура охлаждающей жидкости двигателя ТС;
- и т.д.
Решение, о котором мы будем говорить в данной статье, состоит в считывании данных с CAN-шины автомобиля.
CAN (англ. Controller Area Network — сеть контроллеров) — популярный стандарт промышленной сети, ориентированный на объединение в единую сеть различных исполнительных устройств и датчиков, широко используемый в автомобильной автоматике. На сегодняшний день практически все современные автомобили оснащены так называемой цифровой проводкой — автомобильной CAN-шиной.
. Откуда появилась задача считывания данных с CAN-шины?
Задача считывания данных с CAN-шины появилась как следствие задачи оптимизации расходов на эксплуатацию автотранспорта.
В соответствии с типовыми запросами заказчиков, автомобили и спецтехника оснащаются системой спутникового ГЛОНАСС или GPS мониторинга и системой контроля оборота топлива (на базе погружных либо ультразвуковых датчиков уровня топлива).
Но практика показала, что заказчики все чаще интересуются более экономичными способами получения данных, а также такими, которые не требовали бы серьезного вмешательства в конструкцию, а также электрику автомобиля.
Именно таким решением стало получение информации с CAN-шины. Ведь оно имеет целый ряд преимуществ:
1. Экономия на дополнительных устройствах
Не нужно нести значительных расходов на приобретение и установку различных датчиков и устройств.
2. Сохранение гарантии на автомобиль
Обнаружение производителем стороннего вмешательства в конструкцию либо электрику автомобиля грозит практически гарантированным снятием транспортного средства с гарантии. А это явно не входит в сферу интересов автовладельцев.
А это явно не входит в сферу интересов автовладельцев.
3. Получение доступа к информации со штатно установленных электронных устройств и датчиков.
В зависимости от электронной системы в автомобиле может быть штатно реализован определенный набор функций. Ко всем этим функциям, теоретически, мы можем получить доступ через CAN-шину. Это может быть пробег, уровень топлива в бензобаке, датчики открытия/закрытия дверей, температура за бортом и в салоне, обороты двигателя, скорость движения, и т.д.
Технические специалисты компании Скайсим выбрали для тестирования данного решения прибор . Он имеет встроенный дешифратор FMS и может считывать информацию напрямую с CAN-шины автомобиля.
. Какие достоинства и недостатки влечет за собой решение со считыванием данных с CAN-шины?
Достоинства:
Возможность работы в режиме жёсткого реального времени.
. Простота реализации и минимальные затраты на использование.
. Высокая устойчивость к помехам.
. Надёжный контроль ошибок передачи и приёма.
. Широкий диапазон скоростей работы.
. Большое распространение технологии, наличие широкого ассортимента продуктов от различных поставщиков.
Недостатки:
Максимальная длина сети обратно пропорциональна скорости передачи.
. Большой размер служебных данных в пакете (по отношению к полезным данным).
. Отсутствие единого общепринятого стандарта на протокол высокого уровня.
Стандарт сети предоставляет широкие возможности для практически безошибочной передачи данных между узлами, оставляя разработчику возможность вложить в этот стандарт всё, что туда сможет поместиться. В этом отношении CAN-шина подобна простому электрическому проводу. Туда можно «затолкать» любой поток информации, который сможет выдержать пропускная способность шины.
Известны примеры передачи звука и изображения по шине CAN. Известен случай создания системы аварийной связи вдоль автодороги длиной несколько десятков километров (Германия).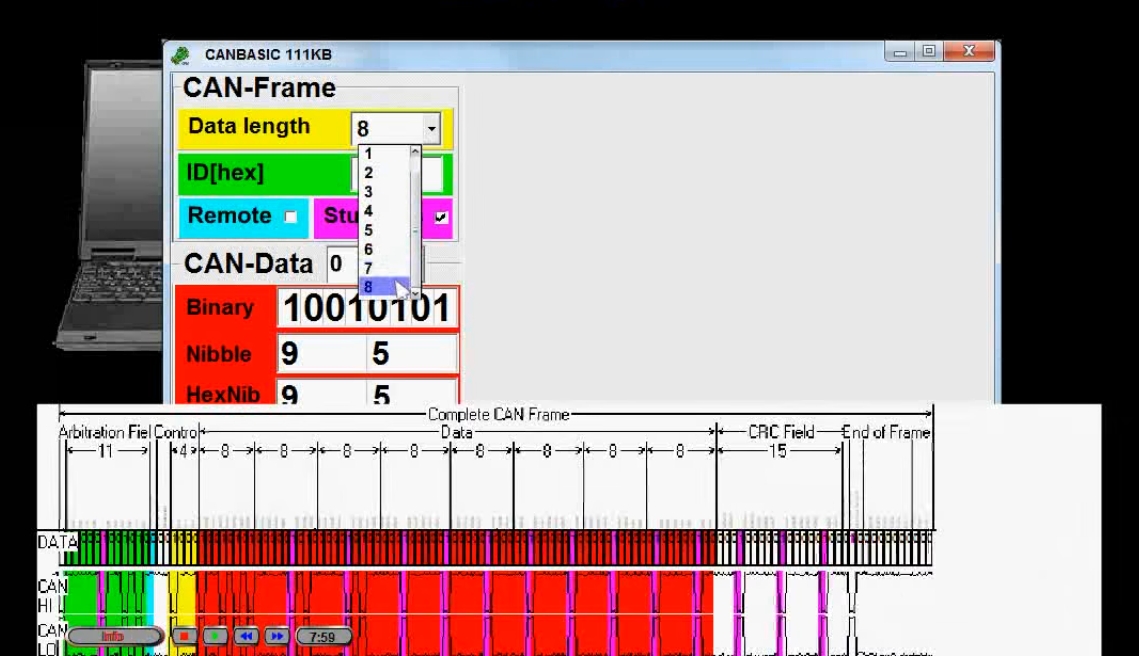 (В первом случае нужна была большая скорость передачи и небольшая длина линии, во втором случае — наоборот).
(В первом случае нужна была большая скорость передачи и небольшая длина линии, во втором случае — наоборот).
Изготовители, как правило, не афишируют, как именно они используют полезные байты в пакете. Поэтому FMS прибор не всегда может расшифровать данные, которые «отдает» CAN-шина. Кроме того, не все марки автомобилей имеют CAN-шину. И даже не все автомобили одной марки и модели могут выдавать одинаковую информацию.
Пример реализации решения:
Не так давно компанией Скайсим совместно с партнером был реализован большой проект по мониторингу автотранспорта. В парке были различные грузовые автомобили иностранного производства. В частности, грузовые автомобили Scania p340.
Для того, чтобы проанализировать процесс получения данных с CAN-шины мы, по солгасованию с заказчиком, провели соответствующие исследования на трех автомобилях Scania p340: один 2008 года выпуска, второй начала 2009 и третий конца 2009 года.
Результаты оказались следующими:
- с первого данные получены так и не были;
- со второго был получен только пробег;
- с третьего были получены все интересующие данные (уровень топлива, температура охлаждающей жидкости, обороты двигателя, общий расход, общий пробег).

На рисунке отображен фрагмент сообщения из информационной системы Wialon, где:
Fuel_level — уровень топлива в баке в %;
Temp_aqua — Температура охлаждающей жидкости в градусах Цельсия;
Taho — Данные с тахометра (об/мин).
Регламент реализации решения был следующий:
1. Навигационный прибор Galileo ГЛОНАСС/GPS был подключен к CAN-шине грузовиков.
Данная модель автотрекера была выбрана из-за оптимального сочетания функционала, надежности и стоимости. Кроме того, она поддерживает FMS (Fuel Monitoring System) — систему, которая позволяет регистрировать и контролировать основные параметры использования транспортного средства, т.е. подходит для подключения к CAN-шине.
Схему подключения к CAN-шине со стороны прибора Galileo можно найти в руководстве пользователя. Для подключения со стороны автомобиля необходимо, в первую очередь, найти свитую пару проводов, подходящую к диагностическому разъёму. Диагностический разъем всегда в доступности и располагается вблизи от рулевой колонки. В 16 контактном разъёме по стандарту OBD II это 6-CAN high, 14-CAN low. Обратите внимание, что у проводов High напряжение примерно 2,6-2,7В, у проводов Low оно, как правило на 0,2В меньше.
_________________________________________________________________________
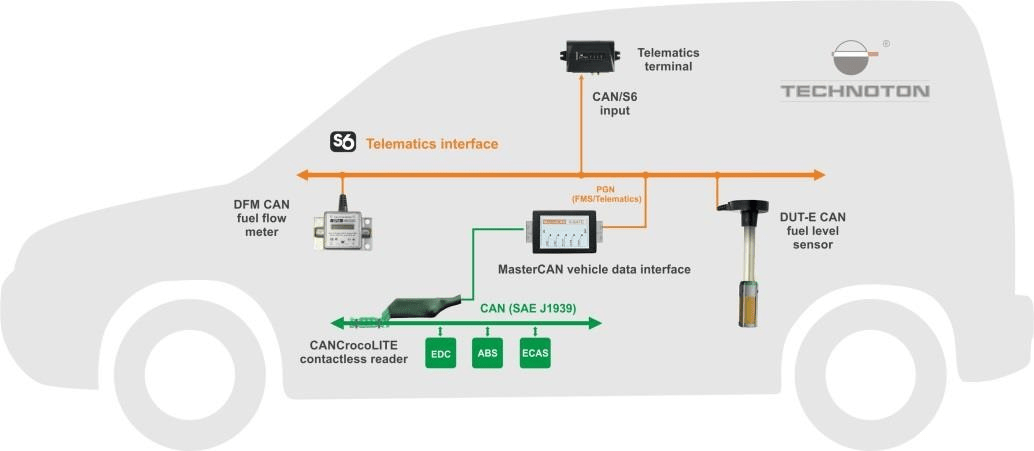
Еще одним уникальным решением, которое было использовано для снятия данных с CAN-шины, стал бесконтактный считыватель данных CAN Crocodile (производство СП Технотон, г. Минск). Он отлично подходит для работы с приборами Galileo.
Преимущества технологии CAN Crocodile:
CAN Crocodile позволяет получать данные о работе автомобиля из шины CAN без вмешательства в целостность самой шины.
Считывание данных происходит без механического и электрического контакта с проводами.
CAN Crocodile применяется для подключения к шине CAN систем GPS/ГЛОНАСС мониторинга, которые получают информацию о режимах работы двигателя, состоянии датчиков, наличии неисправностей и т.д.
CAN Crocodile не нарушает изоляцию проводов CAN и «слушает» обмен по шине с помощью специального беспроводного приемника.
Применение CAN Crocodile абсолютно безопасно для автомобиля, незаметно для работы бортового компьютера, диагностического сканера и других электронных систем. Особенно актуально применение CAN Crocodile для гарантийных автомобилей, в которых подключение каких-либо электронных устройств к шине CAN часто служит поводом для снятия с гарантии.
2. Если провода обнаружены и идентифицированы верно, можно приступать к запуску CAN-сканера в приборе Galileo.
3. Выбирается стандарт FMS, скорость для большинства автомобилей 250 000.
4. Запускается сканирование.
5. После окончания сканирования совершается переход на главную страницу конфигуратора. Если сканирование завершено успешно, мы получаем доступ к расшифрованным данным.
6. Если ничего, кроме «end scan» Вы не увидели, тут есть несколько вариантов. Либо было неправильно осуществлено подключение, либо автомобиль по каким-то причинам не выдает данные, либо прибору неизвестен шифр данной CAN-шины. Как уже было сказано, такое случается довольно часто, поскольку пока не существует единого стандарта для передачи данных и их обработки по CAN. К сожалению, как показывает практика, получить полные данные с CAN-шины не всегда удается.
Но есть еще один момент, который важно затронуть.
Чаще всего основной целью клиентов является контроль уровня и расхода топлива.
Даже если данные со штатных датчиков будут успешно получены с CAN-шины, какова их практическая ценность?
Дело в том, что основное назначение штатных датчиков уровня топлива — дать оценку с той степенью точности, которая кажется правильной производителю ТС. Эта точность не может быть ставнима с точностью, которую дает погружной датчик уровня топлива (ДУТ) производства Омникомм или, например, Технотон .
Одна из главных задач, которую решает штатный ДУТ, это чтобы топливо внезапно не закончилось, и водитель понимал общую ситуацию с уровнем топлива в баке. От простого по своему устройству штатного поплавкового датчика сложно ожидать большой точности. Кроме того, бывают случаи, когда штатный датчик искажает данные (например, когда транспорт располагается на склоне).
Выводы
По ряду вышеназванных причин, мы рекомендуем не полагаться полносьтю на показания штатных датчиков уровня топлива, а рассматривать каждую ситуацию индивидуально. Как правило, подходящее решение может быть найдено только совместно с техническими специалистами. У разных производителей ТС разная точность показаний. У всех заказчиков также разные задачи. И только под конкретную задачу целесообразно подбирать средства решения. Кому-то вполне подойдет решение с получением данных с CAN-шины, так как оно в разы дешевле и не требует никаких изменений топливной системы ТС. А вот заказчикам с высокими требованиями по точности разумно рассматривать вариант с погружным ДУТом.
CAN-шина — устройство, облегчающее управление машиной за счет обмена информацией с другими системами авто. Передача данных от одного автомобильного блока к другому осуществляется по специальным каналам с использованием шифрования.
[ Скрыть ]
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.
Виды CAN-шин
Условно CAN-шины можно разделить между собой на два типа в соответствии с использующимися идентификаторами:
- КАН2, 0А. Так маркируются цифровые устройства, которые могут функционировать в 11-битном формате обмена данными. Этот тип интерфейсов по определению не может выявить ошибки на сигналы от модулей, работающих с 29 бит.
- КАН2, 0В. Так маркируются цифровые интерфейсы, функционирующие в 11-битном формате. Но ключевая особенность состоит в том, что данные об ошибках будут передаваться на микропроцессорные устройства, если обнаруживается идентификатор на 29 бит.
CAN-шины могут делиться на три категории в соответствии с видом:
- Для силового агрегата автомобиля. Если подключить к нему такой тип интерфейса, это позволит обеспечить быструю связь между управляющими системами по дополнительному каналу. Предназначение шины заключается в синхронизации работы ЭБУ двигателя с другими узлами. Например, коробкой передач, антиблокировочной системой и т. д.
- Устройства типа Комфорт. Такая разновидность цифровых интерфейсов используется для соединения всех систем данной категории. К примеру, электронной регулировки зеркал, подогрева сидений и т. д.
- Информационно-командные интерфейсы. Имеют аналогичную скорость передачи информации. Используются для обеспечения качественной связи между узлами, необходимыми для обслуживания транспортного средства. К примеру, между электронным блоком управления и навигационной системой или смартфоном.
О принципе действия, а также о разновидностях цифровых интерфейсов рассказал канал «Электротехника и электроника для программистов».
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Что понадобится?
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Неисправности
Поскольку CAN-интерфейс завязан со многими системами автомобиля, при поломке или некорректной работе одного из узлов в нем могут появиться неполадки. Их наличие отразится на функционировании основных агрегатов.
Признаки и причины
О появлении неисправностей могут сообщить такие «симптомы»:
- на приборной панели загорелись одновременно несколько значков без причины — подушки безопасности, рулевое управление, давление в системе смазки и т. д.;
- появился световой индикатор Check Engine;
- на контрольном щитке отсутствует информация о температуре силового агрегата, уровне топлива в баке, скорости т. д.
Причины, по которым могут возникнуть неисправности в работе CAN-интерфейса:
- обрыв проводки в одной из систем или повреждение электролиний;
- короткое замыкание в работе агрегатов на батарею или землю;
- повреждение резиновых перемычек на разъеме;
- окисление контактов, в результате чего нарушается передача сигнала между системами;
- разряд АКБ автомобиля либо падение величины напряжения в электросети, что связано с неправильным функционированием генераторной установки;
- замыкание систем CAN-high либо CAN-low;
- появление неисправностей в работе катушки зажигания.
Подробнее о поломках цифрового интерфейса и тестировании с использованием компьютера рассказал канал «KV Avtoservis».
Диагностика
Чтобы определить причину появления неполадок, потребуется тестер, рекомендуется использование мультиметра.
Процесс проверки:
- Диагностика начинается с поиска проводника витой пары КАН-шины. Кабель имеет черную либо оранжево-серую изоляцию. Первый является доминантным уровнем, а второй — второстепенным.
- С помощью мультиметра производится проверка величины напряжения на контактных элементах. При выполнении задачи зажигание нужно включить. Процедура тестирования позволит выявить напряжение в диапазоне от 0 до 11 вольт. На практике это обычно 4,5 В.
- Выполняется отключение зажигания. От аккумулятора отсоединяется проводник с отрицательным контактом, предварительно гаечным ключом надо ослабить зажим.
- Выполняется измерение параметра сопротивления между проводниками. О замыкании контактов можно узнать, если эта величина стремится к нулю. Когда диагностика показала, что сопротивление бесконечно, то в электролинии имеется обрыв. Проблема может заключаться непосредственно в контакте. Требуется более детально проверить разъем и все провода.
- На практике замыкание обычно происходит из-за поломки управляющих устройств. Для поиска вышедшего из строя модуля следует поочередно отключить от питания каждый блок и выполнить проверку величины сопротивления.
Пользователь Филат Огородников рассказал о диагностике КАН-шины с использованием осциллографа.
Как сделать анализатор своими руками?
Самостоятельно выполнить сборку данного устройства сможет только профессионал в области электроники и электротехники.
Основные нюансы процедуры:
- В соответствии со схемой на первом фото в галерее надо приобрести все элементы для разработки анализатора. На ней подписаны составляющие детали. Потребуется плата с контроллером STM32F103С8Т6. Понадобится электросхема стабилизированного регуляторного устройства и КАН трансивер МСР2551.
- При необходимости в анализатор добавляется блютуз-модуль. Это позволит при эксплуатации девайса записать основную информацию на мобильное устройство.
- Процедура программирования выполняется с использованием любой утилиты. Рекомендуется применение программ КАНХакер или Ардуино. Первый вариант более функциональный и имеет опцию фильтрации пакетных данных.
- Для осуществления прошивки потребуется преобразовательное устройство USB-TTL, оно понадобится для отладки. Простой вариант — применение ST-Link второй версии.
- Загрузив программу на компьютер, основной файл формата ЕХЕ необходимо прошить в контроллер с использованием программатора. После выполнения задачи ставится перемычка бутлоудера, а изготовленное устройство подключается к ПК через USB-выход.
- Заливать прошивку в анализатор можно с использованием программного обеспечения MPHIDFlash.
- Когда обновление ПО будет завершено, надо отсоединить провод и демонтировать перемычку. Производится установка драйверов. Если устройство собрано верно, то на компьютере оно будет определяться как COM-порт, это можно посмотреть в диспетчере задач.
Фотогалерея
Схема для разработки CAN-анализатора Основная плата для сборки устройства
Плюсы и минусы CAN-шин
Преимущества, которыми обладает цифровой интерфейс:
- Быстродействие. Устройство может оперативно обмениваться пакетными данными между разными системами.
- Высокая устойчивость к воздействию электромагнитных помех.
- Все цифровые интерфейсы имеют многоуровневую систему контроля. Благодаря этому можно не допустить появления ошибок при передаче информации и ее приеме.
- При работе шина сама раскидывает скорость по каналам в автоматическом режиме. Благодаря этому обеспечивается эффективная работа электронных систем транспортного средства.
- Цифровой интерфейс является безопасным. Если к электронным узлам и системам автомобиля кто-то попытается получить незаконный доступ, шина автоматически заблокирует эту попытку.
- Наличие цифрового интерфейса позволяет упрощенно произвести монтаж охранной системы на машину с минимальным вмешательством в штатную бортовую сеть.
Минусы, которыми обладает CAN-шина:
- Некоторые интерфейсы имеют ограничения по объему информации, которая может передаваться. Этот недостаток будет весомым для современного автомобиля, «напичканного» электроникой. При добавлении дополнительных устройств на шину возлагается более высокая нагрузка. Из-за этого снижается время отклика.
- Все пакетные данные, которые передаются по шине, имеют определенное назначение. Для полезной информации отводится минимальная часть трафика.
- Если применяется протокол повышенного уровня, это станет причиной отсутствия стандартизации.
Видео «Ремонт CAN-интерфейса своими руками»
Пользователь Roman Brock рассказал о процедуре восстановления шины приборной панели в автомобиле Форд Фокус 2 рестайлинг.
CAN BUS в автомобиле: для чего он нужен.
CAN BUS в автомобиле: для чего он нужен.
В настоящее время авто производители все чаще и чаще добавляют различные новшества и улучшения в свои автомобили. Это могут быть дополнительные устройства, или расширение функционала уже ранее используемых устройств. Для того, чтобы не прокладывать новую проводку к подключаемому устройства, его подключают уже к имеющимся сигнальным/управляющим проводам, так называемой Кан-шине (Can Bus).
Немецкая компания BOSCH в середине 80-х предложила автопроизводителям новую архитектуру обмена данными между устройствами — Controller Area Network или, как принято сокращенно называть — CAN BUS. Это новшество решило сразу несколько проблем. Во-первых, значительно сократилось использование количества проводов в автомобиле, общая длинна которых уже приближалась к километру, а вес к центнеру. А во-вторых, облегчило подключение новых устройств без значительных переделок в автомобиле.
Конечно же, производители магнитол не упустили возможности использовать этот дополнительный потенциал CAN шины и в своих продуктах. Как правило, если в автомобиле присутствует CAN BUS, то необходимо использовать автомагнитолу со встроенным декодером сигналов от этой шины. В противном случае, пользователь может столкнуться с рядом существенных проблем, при подключении обыкновенной магнитолы. В частности не будет работать штатный цифровой усилитель (KIA, JBL, Pioneer, Rockford, BOSE), т.к. управление этими усилителями (включение, баланс, управление звуковыми сценами) происходит посредством передачи данным по CAN шине. Не будет работать камера заднего вида, кнопки управления на руле, трип-компьютер (отображает запас хода, расход топлива, скорость, режимы работы автомобиля и т.п.), не будет отображаться информация на экране магнитолы о состоянии парковочных датчиков, режиме работы кондиционера и прочее. Еще одной из проблем может стать разрядка АКБ автомобиля вследствие постоянно включенной автомагнитолы, т.к. сигнал на включение/выключение головного устройства так же может поступать по этой шине.
Как видите, проблем могут возникнуть достаточно много, что однозначно полностью перечеркнет удовольствие от покупки новой автомагнитолы.
Поэтому, приобретая новое мультимедийное головное устройство, убедитесь, совместимо ли оно с Вашим автомобилем. В случае отсутствия CAN BUS в автомобиле, Вам подойдет любая универсальная (через переходную рамку) или штатная автомагнитола. Если же в автомобиле присутствует CAN BUS, то нужно будет докупать отдельные декодеры кан-шины (питания АСС, декодер камеры, рулевого управления и т.д.), либо приобрести автомагнитолу с уже установленным декодером CAN BUS.
Кан шина принцип работы
CAN шина, что же это такое? Много информации читал, но нихрена не понимал. А тут вот нашлось простое и доходчивое объяснение, которое поймёт и ребёнок. А может и не поймет…
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.
Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN
Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Немного отступлю от первоисточника.
Самый главный плюс, это очень высокая помехозащищённость сигнала. В чём прикол? Одновременно идут два дублирующих сигнала, только один высокий, второй низкий. Ловят они помеху. Помеха воздействует одинаково на оба сигнала. А на выходе у нас одинаковый уровень. Два уровня сигнала компенсируют помеху. Наглядно это выглядит вот так:
Вот такие пироги. Наткнулся тут : quantexlab
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).
Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:
Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:
Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.
«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.
Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.
Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.
Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Для того, чтобы понять принципы работы CAN-шины мы решили написать/перевести ряд статей, посвященных этой тематике, как обычно, основываясь на материалах зарубежных источников.
Одним из подобных источников, который, как нам показалось, вполне подходящим образом иллюстрирует принципы работы CAN-шины, стал видеоролик-презентация учебного продукта CANBASIC компании Igendi Engineering (http://canbasic.com).
Также можете прочитать вторую нашу переводную статью Введение в CAN.
Добро пожаловать на презентацию нового продукта CANBASIC, учебной системы (платы), посвященной вопросу функционирования шины КАН (CAN).
Мы начнем с основ построения сети CAN-шины. На схеме приведен автомобиль с его системой освещения.
Показана обычная проводка, в которой каждая лампа напрямую подключена с каким-либо переключателем или контактом педали тормоза.
Теперь аналогичная функциональность показана с применением технологии CAN-шины. Передние и задние световые приборы подключены к контролирующим модулям. Контролирующие модули соединены параллельно с такими же проводами шины.
Этот небольшой пример демонстрирует, что объем электропроводки снижается. Вдобавок ко всему модули управления могут обнаруживать перегоревшие лампы и информировать об этом водителя.
Автомобиль на указанном виде содержит четыре модуля управления и четко отражает построение учебной системы (платы) CANBASIC
В вышеописанном указано четыре узла шины (CAN-узла).
Передний модуль контролирует передние световые приборы.
Узел сигнализации обеспечивает контроль внутренней части автомобиля.
Основной контрольный модуль соединяет все системы транспортного средства для диагностики.
Задний узел контролирует задние световые приборы.
На тренировочной доске CANBASIC вы можете увидеть маршрутизацию (расположение) трех сигналов: «Питание», «CAN-Hi» и «земли», соединяющихся в контрольном модуле.
В большинстве транспортных средств для подключения главного модуля управления к ПК с помощью диагностического программного обеспечения вам нужен OBD-USB конвертер.
Плата CANBASIC уже содержит в себе OBD-USB конвертер и может быть напрямую подключена к ПК.
Питается плата от интерфейса USB, поэтому дополнительные кабели не нужны.
Провода шины используются для передачи множества данных. Как это работает ?
Как работает CAN-шина
Эти данные передаются последовательно. Вот пример.
Человек с лампой, передатчик, хочет отправить какую-то информацию человеку с телескопом, получателю (приемнику). Он хочет передать данные.
Для того, чтобы сделать это они договорились, что получатель смотрит за состоянием лампы каждые 10 секунд.
Это выглядит так:
Спустя 80 секунд:
Теперь 8 бит данных были переданы со скоростью 0,1 бит в секунду (т.е. 1 бит в 10 секунд). Это называется последовательной передачей данных.
Для использования этого подхода в автомобильном приложении интервал времени сокращается с 10 секунд до 0,000006 секунды. Для передачи информации посредством изменения уровня напряжения на шине данных.
Для измерения электрических сигналов шины КАН используется осциллограф. Две измерительных площадки на плате CANBASIC позволяют измерить этот сигнал.
Чтобы показать полное CAN-сообщение разрешение осциллографа уменьшается.
В результате одиночные CAN-биты больше не могут быть распознаны. Для решения этой проблемы CANBASIC-модуль оснащен цифровым запоминающим осциллографом.
Мы вставляем модуль CANBASIC в свободный разъем USB, после чего он будет автоматически обнаружен. Программное обеспечение CANBASIC можно запустить прямо сейчас.
Вы можете видеть вид программного осциллографа с прикрепленными значениями битов. Красным показаны данные, переданные в предыдущем примере.
Чтобы объяснить другие части CAN-сообщения мы раскрашиваем CAN-кадр и прикрепляем на него подписи с описанием.
Каждая раскрашенная часть CAN-сообщения соответствует полю ввода того же цвета. Область, отмеченная красным, содержит информацию о пользовательских данных, которая может быть задана в формате битов, полубайтов или шестнадцатиричном формате.
Желтая область определяет количество пользовательских данных. В зеленой зоне может быть установлен уникальный идентификатор.
Синяя область позволяет задать CAN-сообщение для удаленного запроса. Это означает, что будет ожидаться ответ от другого CAN-узла. (Разработчики системы сами рекомендуют не пользоваться удаленными запросами по ряду причин приводящих к глюкам системы, но об этом будет другая статья.)
Многие системы с шиной CAN защищены от помех вторым каналом CAN-LO для передачи данных, который является инвертированным относительно сигнала CAN-HI (т.е. идет тот же сигнал, только с обратным знаком).
Шесть последовательных битов с одинаковым уровнем определяют конец CAN-кадра.
Так совпало, что другие части CAN-кадра могут содержать более пяти последовательных битов с одинаковым уровнем.
Чтобы избежать этой битовой метки, если появляется пять последовательных битов с одинаковым уровнем, в конце CAN-кадра вставляется противоположный бит. Эти биты называют стафф-битами (мусорными битами). CAN-приемники (получатели сигнала) игнорируют эти биты.
С помощью полей ввода могут быть заданы все данные КАН-кадра и поэтому каждое КАН-сообщение может быть отправлено.
Вставленные данные немедленно обновляются в CAN-кадре, в данном примере длина данных будет изменена с одного байта на 8 байтов и сдвинута назад на один байт.
Текст описания показывает, что сигнал поворота будет управляться с помощью идентификатора «2С1» и бит данных 0 и 1. Все биты данных сбрасываются на 0.
Идентификатор установлен в значение «»2С1». Для активации сигнала поворотов бит данных должен быть установлен с 0 на 1.
В режиме «в салоне» вы можете управлять всем модулем с помощью простых щелчков мыши. Данные CAN устанавливаются автоматически в соответствии с желаемым действием.
Лампы поворотников могут быть установлены на ближний свет для работы в качестве ДХО. Яркостью будет управлять широтно-импульсная модуляция (ШИМ), в соответствии с возможностями современной диодной техники.
Теперь мы можем активировать фары ближнего света, противотуманные фары, стоп-сигналы и фары дальнего.
С отключением ближнего света противотуманные фары также отключаются. Логика управления световой системой CANBASIC соответствует автомобилям марки Volkswagen. Особенности зажигания и «возвращения домой» также включены.
С сигнальным узлом вы можете считывать сигнал датчика после инициирующего удаленного запроса.
В режиме удаленного запроса второй CAN-кадр будет принят и показан ниже отправленного CAN-кадра.
Байт данных CAN теперь содержит результат измерения датчика. С приближением к датчику пальца вы можете изменить измеренное значение.
Клавиша паузы замораживает текущий CAN-кадр и позволяет провести точный анализ.
Как уже было показано, различные части CAN-кадра могут быть скрыты.
Кроме того поддерживается скрытие каждого бита в КАН-кадре.
Это очень полезно, если вы хотите использовать представление CAN-кадра в ваших собственных документах, например в листе упражнений.
подключение сигнализации своими руками с автозапуском по кан устройству и видео о принципе работы
Для того чтобы упорядочить работу всех контроллеров, которые облегчают управление и повышают контроль вождения автомобилем, используется CAN-шина. Подключить такое устройство к сигнализации машины можно своими руками.
Что такое CAN-шина и принцип ее работы
КАН-шина представляет собой сеть контроллеров. Устройство используется для объединения всех управляющих модулей автомобиля в одну рабочую сеть с общим проводом. Этот девайс состоит из одной пары кабелей, которая называется CAN. Информация, передающаяся по каналам из одного модуля на другой, отправляется в закодированном виде.
Схема подключения устройств к CAN-шине в МерседесеКакие функции может выполнять CAN-шина:
- подключение к автомобильной бортовой сети любых девайсов и устройств;
- упрощение алгоритма подсоединения и функционирования вспомогательных систем машины;
- блок может одновременно получать и передавать цифровые данные из разных источников;
- использование шины снижает воздействие внешних электромагнитных полей на функционирование основных и вспомогательных систем машины;
- CAN-шина позволяет ускорить процедуру передачи информации к определенным устройствам и узлам автомобиля.
Эта система работает в нескольких режимах:
- Фоновый. Все устройства отключены, но на шину подается питание. Величина напряжения слишком мала, поэтому разрядить аккумуляторную батарею шина не сможет.
- Режим запуска. Когда автолюбитель вставляет ключ в замок и проворачивает его либо жмет кнопку Старта, происходит активация устройства. Включается опция стабилизации питания, которое подается на контроллеры и датчики.
- Активный режим. В этом случае между всеми контроллерами и датчиками происходит обмен данными. При работе в активном режиме параметр потребления энергии может быть увеличен до 85 мА.
- Режим засыпания или отключения. При глушении силового агрегата контроллеры КАН перестают функционировать. При включении режима засыпания все узлы машины отключаются от бортовой сети.
Канал Виалон СУшка в своем видео рассказал о КАН-шине и что надо знать про ее эксплуатацию.
Плюсы и минусы
Какими преимуществами обладает КАН-шина:
- Простота установки устройства в автомобиль. Владельцу машины не придется тратиться на монтаж, поскольку выполнить эту задачу можно самостоятельно.
- Быстродействие устройства. Девайс позволяет быстро обмениваться информацией между системами.
- Устойчивость к воздействию помех.
- Все шины обладают многоуровневой системой контроля. Ее использование дает возможность предотвратить появление ошибок при передаче и приеме данных.
- В процессе функционирования шина автоматически разбрасывает скорость по разным каналам. Это позволяет обеспечить оптимальную работу всех систем.
- Высокая безопасность устройства, при надобности система блокирует несанкционированный доступ.
- Большой выбор устройств различных типов от разных производителей. Можно подобрать вариант, предназначенный для конкретной модели авто.
Какие недостатки характерны для устройства:
- В девайсах бывают ограничения по объему передаваемых данных. В современных автомобилях используется множество электронных девайсов. Их большое количество приводит к высокой загруженности канала передачи информации. Это становится причиной увеличения времени отклика.
- Большая часть отправляющихся по шине данных обладает конкретным назначением. На полезную информацию отводится маленькая часть трафика.
- При использовании протокола высшего уровня автовладелец может столкнуться с проблемой отсутствия стандартизации.
Виды и маркировки
Самым популярным типом шин являются устройства, разработанные Робертом Бошем. Девайс может функционировать последовательно, то есть сигнал передается за сигналом. Такие устройства называются Serial BUS. В продаже можно встретить и параллельные шины Parallel BUS. В них передача данных осуществляется по нескольким каналам связи.
О разновидностях, принципе действия, а также возможностях КАН-шины можно узнать из видео, снятого каналом DIYorDIE.
С учетом разных типов идентификаторов можно выделить несколько видов устройств:
- КАН2, 0А Актив. Так маркируются устройства, которые поддерживают 11-битный формат обмена данными. Эти узлы не обозначают ошибки на импульсы 29-битного узла.
- КАН2, 0В Актив. Так маркируются девайсы, функционирующие в 11-битном формате. Основное отличие заключается в том, что при обнаружении идентификатора на 29 бит в системе они будут передавать на управляющий модуль сообщение об ошибке.
Надо учесть, что в современных машинах такие типы устройств не применяются. Это связано с тем, что работа системы должна быть согласованной и логичной. А в данном случае она может функционировать при нескольких скоростях передачи импульсов – на 125 либо 250 кбит/с. Более низкая скорость используется для управления дополнительных устройств, таких как осветительные приборы в салоне, электрические стеклоподъемники, стеклоочистители и т. д. Высокая скорость нужна для обеспечения рабочего состояния трансмиссии, силового агрегата, системы ABS и т. д.
Разновидность функций шин
Рассмотрим, какие существуют функции у различных девайсов.
Девайс для автомобильного двигателя
При соединении устройства обеспечивается быстрый канал передачи данных, по которому информация распространяется со скоростью 500 кбит/с. Основное предназначение шины заключается в синхронизации работы управляющего модуля, к примеру, коробки передач и мотора.
Устройство типа Комфорт
Скорость передачи данных по этому каналу более низкая и составляет 100 кбит/с. Функция такой шины заключается в соединении всех устройств, относящихся к данному классу.
Информационно-командный девайс
Скорость передачи данных такая же, как и в случае с устройствами типа Комфорт. Главная задача шины заключается в обеспечении связи между обслуживающимися узлами, к примеру, мобильным девайсом и системой навигации.
Шины от разных производителей приведены на фото.
1. Устройство для автомобильного ДВС 2. Интерфейсный анализаторМогут ли быть проблемы в работе CAN-шин?
В современном авто цифровая шина используется постоянно. Она работает одновременно с несколькими системами, причем по ее каналам связи постоянно передается информация. Со временем в работе устройства могут возникнуть неполадки. В результате анализатор данных будет функционировать неверно. При обнаружении неполадок автовладелец должен найти причину.
По каким причинам возникают сбои в работе:
- повреждение или обрыв электроцепей устройства;
- произошло замыкание в системе на аккумулятор либо массу;
- могли замкнуть системы КАН-Хай или КАН-Лоу;
- произошло повреждение прорезиненых перемычек;
- разряд аккумуляторной батареи или снижение напряжения в бортовой сети, вызванное некорректной работой генераторного устройства;
- произошла поломка катушки зажигания.
При поиске причин учитывайте, что неисправность может заключаться в некорректной работе вспомогательных устройств, устанавливающихся дополнительно. К примеру, причина может заключаться в неправильном функционировании противоугонной системы, контроллеров и девайсов.
О ремонте CAN-шины приборной панели в автомобиле Форд Фокус 2 можно узнать из ролика, снятого пользователем Brock – Video Corporation.
Процесс поиска неисправности осуществляется так:
- Сначала автовладелец производит диагностику состояния системы. Целесообразно осуществить компьютерную проверку, чтобы выявить все неполадки.
- На следующем этапе производится диагностика уровня напряжения и сопротивления электрических цепей.
- Если все в порядке, то проверяется параметр сопротивления прорезиненых перемычек.
Диагностика работоспособности КАН-шины требует определенных навыков и опыта, поэтому процедуру поиска неисправностей лучше доверить специалистам.
Как подключить сигнализацию по CAN-шине
Для подключения КАН-шины своими руками к автосигнализации машины с автозапуском либо без него надо знать, где находится блок управления противоугонной системой. Если установка сигнализации осуществлялась самостоятельно, то процесс поиска не вызовет сложностей у автовладельца. Управляющий модуль обычно ставится под приборной панелью в районе рулевого колеса либо за контрольным щитком.
Как произвести процедуру подключения:
- Противоугонная система должна быть установлена и подключена ко всем узлам и элементам.
- Найдите толстый кабель оранжевого цвета, он подключается к цифровой шине.
- Адаптер противоугонной системы подсоединяется к контакту найденной шины.
- Производится монтаж устройства в надежном и удобном месте, девайс фиксируется. Надо заизолировать все электрические цепи, чтобы не допустить их перетирания и утечки тока. Производится диагностика правильности выполненной задачи.
- На завершающем этапе настраиваются все каналы для обеспечения рабочего состояния системы. Также надо задать функциональный ряд устройству.
Видео «Пример подключения КАН-шины»
Пользователь Alexander Bast в видеоролике показал на примере автомобиля Фольксваген Поло, как производится процедура подключения шины к бортовой сети автомобиля.
Получение данных с CAN-шины автомобиля
Инновации или уже реальность?
Задача: Получить доступ к показаниям штатных датчиков автомобиля без установки дополнительных.Решение: Считывание данных с CAN-шины автомобиля.
Когда заходит речь о мониторинге таких параметров, как скорость транспортного средства и расход топлива, надежным и отработанным решением является установка автотрекера и датчика уровня топлива.
Если же необходим доступ к такой информации, как обороты двигателя, пробег, температура охлаждающей жидкости и другим данным с бортового компьютера – эта задача уже больше похожа на творческую.
Казалось бы, что может быть логичнее: если в автомобиле уже есть все необходимые датчики, то зачем устанавливать новые? Практически все современные автомобили (особенно, если речь идет о личных автомобилях бизнес-класса и дорогостоящей спецтехнике) штатно оборудованы датчиками, информация с которых поступает в бортовой компьютер.
Вопрос состоит только в том, как получить доступ к этой информации. Долгое время эта задача оставалась нерешенной. Но сейчас на рынке спутникового мониторинга работает все больше высококвалифицированных инженеров, которым все-таки под силу найти решение задачи корректного получения таких данных, как:
- обороты двигателя;
- уровень топлива в баке;
- пробег автомобиля;
- температура охлаждающей жидкости двигателя ТС;
- и т.д.
Решение, о котором мы будем говорить в данной статье, состоит в считывании данных с CAN-шины автомобиля.
CAN (англ. Controller Area Network — сеть контроллеров) — популярный стандарт промышленной сети, ориентированный на объединение в единую сеть различных исполнительных устройств и датчиков, широко используемый в автомобильной автоматике. На сегодняшний день практически все современные автомобили оснащены так называемой цифровой проводкой – автомобильной CAN-шиной.
• Откуда появилась задача считывания данных с CAN-шины?
Задача считывания данных с CAN-шины появилась как следствие задачи оптимизации расходов на эксплуатацию автотранспорта.
В соответствии с типовыми запросами заказчиков, автомобили и спецтехника оснащаются системой спутникового ГЛОНАСС или GPS мониторинга и системой контроля оборота топлива (на базе погружных либо ультразвуковых датчиков уровня топлива).
Но практика показала, что заказчики все чаще интересуются более экономичными способами получения данных, а также такими, которые не требовали бы серьезного вмешательства в конструкцию, а также электрику автомобиля.
Именно таким решением стало получение информации с CAN-шины. Ведь оно имеет целый ряд преимуществ:
1. Экономия на дополнительных устройствах
Не нужно нести значительных расходов на приобретение и установку различных датчиков и устройств.
2. Сохранение гарантии на автомобиль
Обнаружение производителем стороннего вмешательства в конструкцию либо электрику автомобиля грозит практически гарантированным снятием транспортного средства с гарантии. А это явно не входит в сферу интересов автовладельцев.
3. Получение доступа к информации со штатно установленных электронных устройств и датчиков.
В зависимости от электронной системы в автомобиле может быть штатно реализован определенный набор функций. Ко всем этим функциям, теоретически, мы можем получить доступ через CAN-шину. Это может быть пробег, уровень топлива в бензобаке, датчики открытия/закрытия дверей, температура за бортом и в салоне, обороты двигателя, скорость движения, и т.д.
• Какие достоинства и недостатки влечет за собой решение со считыванием данных с CAN-шины?
Достоинства:
• Возможность работы в режиме жёсткого реального времени.
• Простота реализации и минимальные затраты на использование.
• Высокая устойчивость к помехам.
• Надёжный контроль ошибок передачи и приёма.
• Широкий диапазон скоростей работы.
• Большое распространение технологии, наличие широкого ассортимента продуктов от различных поставщиков.
Недостатки:
• Максимальная длина сети обратно пропорциональна скорости передачи.
• Большой размер служебных данных в пакете (по отношению к полезным данным).
• Отсутствие единого общепринятого стандарта на протокол высокого уровня.
Стандарт сети предоставляет широкие возможности для практически безошибочной передачи данных между узлами, оставляя разработчику возможность вложить в этот стандарт всё, что туда сможет поместиться. В этом отношении CAN-шина подобна простому электрическому проводу. Туда можно «затолкать» любой поток информации, который сможет выдержать пропускная способность шины.
Известны примеры передачи звука и изображения по шине CAN. Известен случай создания системы аварийной связи вдоль автодороги длиной несколько десятков километров (Германия). (В первом случае нужна была большая скорость передачи и небольшая длина линии, во втором случае — наоборот).
Изготовители, как правило, не афишируют, как именно они используют полезные байты в пакете. Поэтому FMS прибор не всегда может расшифровать данные, которые «отдает» CAN-шина. Кроме того, не все марки автомобилей имеют CAN-шину. И даже не все автомобили одной марки и модели могут выдавать одинаковую информацию.
Пример реализации решения:
Не так давно компанией Скайсим совместно с партнером был реализован большой проект по мониторингу автотранспорта. В парке были различные грузовые автомобили иностранного производства. В частности, грузовые автомобили Scania p340.
Для того, чтобы проанализировать процесс получения данных с CAN-шины мы, по солгасованию с заказчиком, провели соответствующие исследования на трех автомобилях Scania p340: один 2008 года выпуска, второй начала 2009 и третий конца 2009 года.
Результаты оказались следующими:
- с первого данные получены так и не были;
- со второго был получен только пробег;
- с третьего были получены все интересующие данные (уровень топлива, температура охлаждающей жидкости, обороты двигателя, общий расход, общий пробег).
На рисунке отображен фрагмент сообщения из информационной системы Wialon, где:
Fuel_level – уровень топлива в баке в %;
Temp_aqua – Температура охлаждающей жидкости в градусах Цельсия;
Taho — Данные с тахометра (об/мин).
Регламент реализации решения был следующий:
1. Навигационный прибор Galileo ГЛОНАСС/GPS был подключен к CAN-шине грузовиков.
Данная модель автотрекера была выбрана из-за оптимального сочетания функционала, надежности и стоимости. Кроме того, она поддерживает FMS (Fuel Monitoring System) — систему, которая позволяет регистрировать и контролировать основные параметры использования транспортного средства, т.е. подходит для подключения к CAN-шине.
Схему подключения к CAN-шине со стороны прибора Galileo можно найти в руководстве пользователя. Для подключения со стороны автомобиля необходимо, в первую очередь, найти свитую пару проводов, подходящую к диагностическому разъёму. Диагностический разъем всегда в доступности и располагается вблизи от рулевой колонки. В 16 контактном разъёме по стандарту OBD II это 6-CAN high, 14-CAN low. Обратите внимание, что у проводов High напряжение примерно 2,6-2,7В, у проводов Low оно, как правило на 0,2В меньше.
_________________________________________________________________________
Еще одним уникальным решением, которое было использовано для снятия данных с CAN-шины, стал бесконтактный считыватель данных CAN Crocodile (производство СП Технотон, г. Минск). Он отлично подходит для работы с приборами Galileo.
Преимущества технологии CAN Crocodile:
• CAN Crocodile позволяет получать данные о работе автомобиля из шины CAN без вмешательства в целостность самой шины.
• Считывание данных происходит без механического и электрического контакта с проводами.
• CAN Crocodile применяется для подключения к шине CAN систем GPS/ГЛОНАСС мониторинга, которые получают информацию о режимах работы двигателя, состоянии датчиков, наличии неисправностей и т.д.
• CAN Crocodile не нарушает изоляцию проводов CAN и «слушает» обмен по шине с помощью специального беспроводного приемника.
• Применение CAN Crocodile абсолютно безопасно для автомобиля, незаметно для работы бортового компьютера, диагностического сканера и других электронных систем. Особенно актуально применение CAN Crocodile для гарантийных автомобилей, в которых подключение каких-либо электронных устройств к шине CAN часто служит поводом для снятия с гарантии.
2. Если провода обнаружены и идентифицированы верно, можно приступать к запуску CAN-сканера в приборе Galileo.
3. Выбирается стандарт FMS, скорость для большинства автомобилей 250 000.
4. Запускается сканирование.
5. После окончания сканирования совершается переход на главную страницу конфигуратора. Если сканирование завершено успешно, мы получаем доступ к расшифрованным данным.
6. Если ничего, кроме «end scan» Вы не увидели, тут есть несколько вариантов. Либо было неправильно осуществлено подключение, либо автомобиль по каким-то причинам не выдает данные, либо прибору неизвестен шифр данной CAN-шины. Как уже было сказано, такое случается довольно часто, поскольку пока не существует единого стандарта для передачи данных и их обработки по CAN. К сожалению, как показывает практика, получить полные данные с CAN-шины не всегда удается.
Именно поэтому не каждый запрос на считывание данных с CAN-шины может быть в полной мере реализован. Мы рекомендуем своим партнерам-интеграторам предупреждать об этом заказчиков заранее, для того чтобы в дальнейшем избежать неоправданных ожиданий.
Но есть еще один момент, который важно затронуть.
Чаще всего основной целью клиентов является контроль уровня и расхода топлива.
Даже если данные со штатных датчиков будут успешно получены с CAN-шины, какова их практическая ценность?
Дело в том, что основное назначение штатных датчиков уровня топлива – дать оценку с той степенью точности, которая кажется правильной производителю ТС. Эта точность не может быть ставнима с точностью, которую дает погружной датчик уровня топлива (ДУТ) производства Омникомм или, например, Технотон.
Одна из главных задач, которую решает штатный ДУТ, это чтобы топливо внезапно не закончилось, и водитель понимал общую ситуацию с уровнем топлива в баке. От простого по своему устройству штатного поплавкового датчика сложно ожидать большой точности. Кроме того, бывают случаи, когда штатный датчик искажает данные (например, когда транспорт располагается на склоне).
Выводы
По ряду вышеназванных причин, мы рекомендуем не полагаться полносьтю на показания штатных датчиков уровня топлива, а рассматривать каждую ситуацию индивидуально. Как правило, подходящее решение может быть найдено только совместно с техническими специалистами. У разных производителей ТС разная точность показаний. У всех заказчиков также разные задачи. И только под конкретную задачу целесообразно подбирать средства решения. Кому-то вполне подойдет решение с получением данных с CAN-шины, так как оно в разы дешевле и не требует никаких изменений топливной системы ТС. А вот заказчикам с высокими требованиями по точности разумно рассматривать вариант с погружным ДУТом.
Описание шины CAN
(2021 г.) | AutoPi
CAN-шина означает сеть контроллеров и состоит из двух электрических проводов, называемых CAN_Low и CAN_High. Информация в каждом транспортном средстве передается от и к ЭБУ, а шина CAN построена для обеспечения надежной работы в суровых условиях.
Мы приготовили простой введение в CAN-шину. Было рассмотрено несколько тем, чтобы дать вам лучшее объяснение (CAN Bus) протокол.
При работе над статьей мы объединили знания наших ведущих экспертов внутри компании, а также других членов команды, у которых нет экспертиза.
Почему? Идея заключалась в том, чтобы написать профессиональное, но простое введение в CAN Bus для всех, нет. независимо от того, сколько у вас опыта.
В заключение, неважно, если вы ничего не знаете о CAN-шине или вы уже являетесь профессионалом. Простое введение в CAN-шину будет предоставим вам всю необходимую информацию.
Что такое CAN-шина?
CAN-шина — это набор из двух электрических проводов в автомобильной сети (CAN_Low и CAN_High), по которым информация отправляется к ЭБУ и от них. Сеть, которая позволяет ЭБУ обмениваться данными, называется сетью контроллеров (CAN).
Шина CAN является шина последовательной связи, разработанная для надежной работы в суровых условиях, прежде всего в промышленные и автомобильные приложения.
Это в основном стандарт автобуса, который позволяет микроконтроллеры и устройства для связи друг с другом.
CAN-шина одна протоколов используется в бортовой диагностике (OBD). OBD-2 есть в настоящее время обязателен во всех легковых и легких грузовиках по всему миру. глобус.
CAN-шина легко объясняется
А теперь попробуем посмотри на это с совершенно другой точки зрения.
Представьте, что ваша машина похожа на человеческое тело и нервную систему. в теле человека находится сеть контроллеров (шина CAN) в автомобиле, которая также позволяет коммуникация.Узлы или электронные блоки управления (ЭБУ) — это что-то вроде частей тела, которые связаны между собой через шину CAN. Информация может быть без труда разделяется между сторонами. Это гораздо легче понять, не правда ли?
Система CAN-шины
В зависимости от типа автомобиля, он может иметь до 70 ЭБУ (электронных блоков управления), и каждый из них должен использоваться совместно с другими частями сеть.
Вот некоторые из примеров, например; аудиосистема, подушки безопасности, блок управления двигателем, блок управления дверьми и так далее. Шина CAN позволяет ЭБУ обмениваться данными друг с другом.
Думайте об ЭБУ как о специфических люди. Один ЭБУ может формировать и передавать информацию по шине CAN другим ЭБУ, которые принимают данные. После После этого они проверит данные и решат, хотят они их получить или проигнорировать.
Шина CAN использует два провода для связь — CAN low и CAN high (CAN L и CAN H).ISO 11898-2 описывает физический уровень CAN-шины. а ISO 11898-1 описывает уровень канала передачи данных.
Физический уровень представляет типы кабелей, требования к узлам, уровни электрических сигналов, сопротивление кабеля и т. д.
С другой стороны, ISO 11898-2 представляет такие вещи, как скорость передачи, длина кабеля и оконечная нагрузка.
Кабель длина должна быть 40 метров (1 Мбит / с) или 500 метров (125 кбит / с).
г. CAN-шина должна быть завершена с помощью резистора CAN-шины 120 Ом на конце каждой шины.
CAN узлы должны быть подключены через двухпроводную шину со скоростью до 1 Мбит / с (CAN) или 5 Мбит / с (CAN FD).
Стандарт CAN-шины обычно используется во всех транспортных средствах из-за его ключевых преимуществ, таких как
Надежность
Низкая стоимость
Скорость
Гибкость
Эффективность
Скорость — Определено в настоящее время двумя физическими уровнями — высокоскоростной CAN и низкоскоростной CAN, оба со своими достоинствами и недостатками.
Эффективность — данные с высоким приоритетом будут иметь приоритет по идентификатору, чтобы получить немедленный доступ к шине — не прерывая другие кадры
Недорогой — Когда протокол CAN был создан, его цель заключалась в том, чтобы обеспечивают быструю связь между электронными устройствами и модулями, снижая при этом ошибки, вес, проводку и затраты.
Надежность — стандарт CAN-шины идеален для систем безопасности, таких как автомобили, благодаря своей прочности и надежности.Также существует 5 механизмов для обнаружения ошибок в протоколе CAN, таких как вставка битов, мониторинг битов, проверка кадров, проверка подтверждения и проверка циклическим избыточным кодом.
Гибкость — протокол шины CAN хорошо известен как протокол на основе сообщений, что означает, что узлы могут быть легко добавлены или удалены без выполнения каких-либо обновлений в системе. Это позволяет инженерам легко интегрировать новые электронные устройства без значительного программирования и изменять их в соответствии с вашими требованиями.
Проводка CAN-шины
Одним из лучших преимуществ CAN-шины является уменьшенное количество проводов в сочетании с оригинальной системой предотвращения конфликтов сообщений.
Другое слов, данные не будут потеряны во время передачи сообщения.
Два примера ниже показывают, как Протокол CAN-шины выглядит как с CAN-шиной и как бы он выглядел без CAN-системы.
Понятно, что с CAN bus, узлам намного проще общаться и перемещаться по нему.С другой сторона, без CAN-шины, узлам намного сложнее общаться друг с другом, и связь неэффективно.Есть несколько разных типов сетей. Вы можете найти простое объяснение ниже.
Высокоскоростная шина CAN (ISO 11898)
Поддерживает скорость передачи данных от 40 кбит / с до 1 Мбит / с
Простая кабельная разводка
Мост обычно используется в наши дни
Основа для протоколов более высокого уровня, таких как OBD2, CANopen, j1939 и др.
Низкая скорость CAN автобус
Поддерживает скорость передачи данных от 40 кбит / с до 125 кбит / с
Позволяет продолжить связь, несмотря на неисправность одного из двух провода
Также известный как отказоустойчивый CAN
Каждый Узел CAN имеет собственное завершение CAN
Автобус LIN
Недорогая надбавка
Меньше жгут
Узлы дешевле
Обычно состоит из LIN-мастера, который действует как шлюз. до 16 подчиненных узлов
Обычно включает функции автомобиля, такие как функции двери или кондиционер
Автомобильная промышленность Ethernet
Ethernet поддерживает требования расширенного драйвера к высокой пропускной способности Вспомогательные системы (ADAS), камеры, информационно-развлекательные системы и т. Д.
Обеспечивает гораздо более высокую скорость передачи данных, чем CAN-шина
Недостатки функции безопасности CAN и CAN FD
Мост вероятно, будет широко использоваться в ближайшие годы в автомобильной промышленности. промышленность
CAN FD
Обычно используется в современных высокопроизводительных транспортных средствах
CAN FD является расширением оригинального протокола шины CAN
.Выпущен в 2012 году компанией Bosch
Разработан для удовлетворения потребности в увеличении передачи данных
Что такое сообщение CAN Рамка?
CAN-кадра используются для общаться по шине CAN.CAN использует дифференциальный сигнал с двумя логическими состояниями — доминантным и рецессивным.
МОЖНО сеть использует два сообщения CAN — стандартное CAN и расширенное CAN, которые описаны ниже.
Стандартный CAN
Обычно кадр CAN с 11 В большинстве автомобилей используется идентификатор битов (CAN 2.0A), который также называется стандартным CAN и его можно увидеть в рисунок ниже.
Первый бит — это начало кадр (SOF), который представляет начало сообщения CAN .Следующим идет 11-битный идентификатор, который организует приоритет сообщения CAN. Чем меньше идентификатор, тем выше его приоритет.
Запрос удаленной передачи (RTR) обычно доминирует, но становится рецессивным, когда узлы запрашивают данные друг у друга.
Следующий бит расширения идентификатора (IDE), который является доминирующим при отправке стандартного кадра CAN, а не расширенного. Бит r0 инвертирован и в настоящее время не используется.
Далее идет код длины данных. (DLC), который указывает, сколько байтов данных находится в текущем сообщении. Еще одна важная часть — это данные сам, где это то же количество байтов, что и в битах DLC.
Далее идет проверка циклическим избыточным кодом (CRC), которая представляет собой 16-битную контрольную сумму, которая обнаруживает ошибки и проблемы в передаваемых данных.
Если сообщение правильно полученный, принимающий узел перезапишет рецессивный бит подтверждения (ACK) доминирующим битом.Конец кадр (EOF) указывает конец сообщения CAN.
Он имеет ширину 7 бит и обнаруживает ошибки вставки битов. Последний Часть сообщения CAN — это межкадровое пространство (IFS), которое используется как временная задержка.
Расширенная CAN
Extended CAN использует 29-битный идентификатор с парой дополнительных битов. Расширенный 29-битный идентификатор (CAN 2.0B) идентичен, но имеет более длинный идентификатор и обычно используется в протоколе j1939 — транспортные средства повышенной грузоподъемности.CAN использует два логических состояния; доминирующий и рецессивный.
Доминант — определяет, что дифференциальное напряжение больше минимального порога. Кроме того, доминирующая состояние также достигается за счет подачи логического «0» на шину.
рецессивный — определяет, что дифференциальное напряжение меньше минимального порога.С другой стороны, рецессивный состояние достигается с помощью логической «1».
Имеется также заменяющий пульт бит запроса (SRR), который идет после 11-битного идентификатора и действует как заполнитель, чтобы сохранить то же самое структура как стандартная CAN.
Расширение идентификатора (IDE) должно быть рецессивным, а расширенный идентификатор должны следовать ему соответственно.
Пульт запрос передачи (RTR) идет сразу после 18-битного идентификатора.Обратный бит r1 следует по пути, а остальная часть сообщение остается прежним.
CAN данные по шине лесозаготовка
Запись данных CAN может быть выполнена от нескольких типов транспортных средств, таких как автомобили, автомобили большой грузоподъемности, профилактическое обслуживание и машины черный ящик.
Данные с автомобиля собираются через порт OBD2 и обычно используются для снижения затрат на топливо, увеличения пробега автомобиля и многого другого.
Вкл. с другой стороны, данные о большегрузных автомобилях собираются до 1939 г. и обычно используются для улучшения безопасность и снижение затрат.
Транспортные средства и техника могут быть также отслеживается через регистраторы IoT CAN . Это можно сделать в облаке, чтобы избежать поломок. Регистратор CAN может предоставить данные для споров или диагностики. Его еще называют черным ящиком.
Расшифровка необработанного CAN данные
Необработанные данные CAN нелегко удобочитаемый.Поэтому мы подготовили для вас руководство. Ознакомьтесь с руководством о том, как регистрировать необработанные сообщения CAN.Шина CAN поддерживает основа для общения, но не более того. Стандартный протокол CAN не указывает, как обрабатывать сообщения сообщения размером более 8 байтов, или как декодировать данные RAW.
Чтобы указать, как данные передается между узлами CAN сети, пригодится набор стандартизованных протоколов. Есть несколько протоколов более высокого уровня, таких как; OBD2, CANopen, CAN FD и SAE j1939.
БД2 — OBD имеет возможность самодиагностики, которую в основном механики используют для анализа проблем с автомобилем и в целом. здоровье машины. OBD2 определяет коды неисправностей (DTC) и данные в реальном времени (обороты, скорость и т. Д.), Которые может быть записан через регистраторы OBD2.
CANopen — CANopen обычно используется во встроенных управляющих приложениях, таких как промышленная автоматизация, и основан на CAN, что означает, что регистратор данных CAN-шины также может регистрировать CANopen данные.
CAN FD — CAN FD — это шина CAN с гибкой скоростью передачи данных, являющаяся расширением классического канального уровня CAN. По сравнению с классическим протоколом CAN, CAN FD увеличивает полезную нагрузку с 8 до 64 байтов. Это также обеспечивает более высокую скорость передачи данных в зависимости от трансивера CAN.
SAE J1939 — J1939 обычно используется в автомобилях большой грузоподъемности.J1939 такие параметры, как число оборотов в минуту и скорость, анализируются по номеру подозрительного параметра (SPN). Впоследствии они сгруппированы в группы параметров и классифицированы по номеру PG (PGN).
Высокоскоростная передача данных Скорость предлагает диагностику DoIP, точнее примерно 100 раз диагностику CAN. Узнать больше о чем DoIP здесь.
История CAN-шины
Сеть зоны управления (шина CAN) имеет богатую историю и прошел несколько этапов развития.Фактические этапы развития в течение нескольких лет могут можно увидеть ниже.
Разработка CAN-шины началась в 1983 году, когда компания Bosch Первоначально изобрел сеть зон управления, которая позже была кодифицирована в ISO 11898-1. стандарт.
г. Позднее протокол был передан Обществу автомобильных инженеров (SAE) в 1986 году.
Intel был первым, кто представил микросхемы контроллера CAN в 1987 году, и Филлипс присоединился к Intel вскоре после этого. что.
В 1991, Bosch опубликовал CAN 2.0 (CAN 2.0A: 11 бит, 2.0B: 29 бит).
CAN Автобусы в качестве международного стандарта ISO 11898 были приняты в 1993 году.
В 2003, ISO 11898 стал стандартной серией
В В 2012 году компания Bosch выпустила CAN FD 1.0 — гибкая скорость передачи данных
В 2015 г. протокол CAN FD был стандартизирован в ISO 11898-1
.Наконец, стандартизирован физический уровень CAN до 5 Мбит / с. в ISO 11898-2, в 2016 г.
В будущем CAN-шина будет по-прежнему быть широко используемым, но находящимся под влиянием основных тенденций автомобильной промышленности, таких как; рост Интернета вещей и подключенные транспортные средства, влияние автономных транспортных средств, рост облачных вычислений, потребность в передовых транспортных средствах функциональность и многое другое.
Потребность в CAN FD увеличивается и многие эксперты предполагают, что он постепенно заменит классический протокол шины CAN. Будьте в курсе, чтобы узнать, что бывает.
Протокол сети контроллеров (CAN BUS)
Каждый контроллер CAN на шине будет пытаться обнаружить ошибки, описанные выше, в каждом сообщении. Если обнаружена ошибка, обнаруживающий узел передает флаг ошибки, тем самым уничтожая трафик шины. Другие узлы обнаружат ошибку, вызванную флагом ошибки (если они еще не обнаружили исходную ошибку), и предпримут соответствующие действия, т.е.е. отменить текущее сообщение.
Каждый узел поддерживает два счетчика ошибок: счетчик ошибок передачи и счетчик ошибок приема. Существует несколько правил, регулирующих увеличение и / или уменьшение этих счетчиков. По сути, передатчик, обнаруживающий неисправность, увеличивает свой счетчик ошибок передачи быстрее, чем узлы прослушивания увеличивают свой счетчик ошибок приема. Это потому, что велика вероятность того, что виноват передатчик!
Узел запускается в активном режиме ошибки.Когда любой из двух счетчиков ошибок поднимается выше 127, узел переходит в состояние, известное как пассивная ошибка, а когда счетчик ошибок передачи превысит 255, узел перейдет в состояние отключения шины.
- Узел «Активная ошибка» передает флаги активных ошибок при обнаружении ошибок.
- Узел с пассивной ошибкой будет передавать флаги пассивной ошибки при обнаружении ошибок.
- Узел, который отключен от шины, вообще ничего не будет передавать по шине.
Правила увеличения и уменьшения счетчиков ошибок несколько сложны, но принцип прост: ошибки передачи дают 8 баллов ошибок, а ошибки приема дают 1 балл ошибок.Правильно переданные и / или полученные сообщения приводят к уменьшению счетчика (ов).
Пример (немного упрощенный). Предположим, что у узла A на шине плохой день. Всякий раз, когда A пытается передать сообщение, он терпит неудачу (по любой причине). Каждый раз, когда это происходит, он увеличивает свой счетчик ошибок передачи на 8 и передает флаг активной ошибки. Затем он попытается повторно передать сообщение … и произойдет то же самое.
Когда значение счетчика ошибок передачи превышает 127 (т. Е. После 16 попыток), узел A переходит в состояние пассивной ошибки.Разница в том, что теперь он будет передавать по шине флаги пассивной ошибки. Флаг пассивной ошибки состоит из 6 рецессивных битов и не уничтожает другой трафик шины, поэтому другие узлы не услышат жалобу A на ошибки шины. Однако A продолжает увеличивать свой счетчик ошибок передачи. Когда он поднимается выше 255, узел A наконец сдается и отключается от шины.
Что другие узлы думают об узле A? — Для каждого активного флага ошибки, переданного A, другие узлы увеличивают свои счетчики ошибок приема на 1.К тому времени, когда A перейдет в состояние отключения шины, другие узлы будут иметь счетчик в своих счетчиках ошибок приема, который значительно ниже предела для пассивной ошибки, то есть 127. Этот счет будет уменьшаться на единицу для каждого правильно принятого сообщения. Однако узел A останется отключенным от шины.
Большинство контроллеров CAN предоставляют биты состояния (и соответствующие прерывания) для двух состояний:
- «Предупреждение об ошибке» — один или оба счетчика ошибок выше 96
- Bus Off, как описано выше.
Некоторые — но не все! — контроллеры также предоставляют бит для состояния пассивной ошибки.Некоторые контроллеры также предоставляют прямой доступ к счетчикам ошибок.
Привычка контроллера CAN автоматически повторно передавать сообщения при возникновении ошибок временами может раздражать. На рынке есть по крайней мере один контроллер (SJA1000 от Philips), который позволяет полностью вручную управлять обработкой ошибок.
Что такое шина CAN (сеть контроллеров)
В этой статье мы обсудим шину CAN (сеть контроллеров) и другие интерфейсы автомобильной шины, чтобы вы могли:
- См. , что такое CAN-шина на самом деле
- Узнайте об истории развития и будущем систем CAN-Bus
- Изучите , как системы сбора данных Dewesoft взаимодействуют с шиной CAN
Что такое протокол шины CAN?
Контроллерная сеть — CAN-шина — это протокол на основе сообщений, разработанный, чтобы позволить электронным блокам управления (ЭБУ), используемым в современных автомобилях, а также другим устройствам, обмениваться данными друг с другом надежным и приоритетным образом. .Сообщения или «кадры» принимаются всеми устройствами в сети, для чего не требуется хост-компьютер. CAN поддерживается богатым набором международных стандартов ISO 11898.
Схема сети CAN-шины
Что такое CAN FD?
CAN FD — это версия CAN-шины с гибкими данными (скоростью). Стандартная длина каждого сообщения была увеличена на 800% до 64 байтов, а максимальная скорость передачи данных аналогичным образом увеличена с 1 Мбит / с до 8 Мбит / с.«Гибкая» часть относится к тому факту, что ЭБУ могут динамически изменять свою скорость передачи и выбирать больший или меньший размер сообщений в зависимости от требований реального времени.
Несмотря на все эти достижения, CAN FD по-прежнему полностью обратно совместим со стандартом CAN 2.0. Сегодня CAN FD встречается в очень мощных транспортных средствах, но ожидается, что со временем он переместится на все или большинство транспортных средств.
Это видео предоставляет отличную справочную информацию о шинах данных транспортных средств, в том числе CAN:
.
Преимущества CAN-шины
Стандарт CAN-шины широко распространен и используется практически во всех транспортных средствах и многих машинах.В основном это связано с следующими ключевыми преимуществами:
- Просто и недорого : ЭБУ обмениваются данными через единую систему CAN, а не через прямые сложные аналоговые сигнальные линии, что снижает количество ошибок, вес, количество проводов и затраты. Наборы микросхем CAN легко доступны и доступны по цене.
- Полностью централизованная : шина CAN обеспечивает единую точку входа для связи со всеми сетевыми блоками управления, что обеспечивает централизованную диагностику, регистрацию данных и настройку.
- Чрезвычайная надежность : система устойчива к электрическим помехам и электромагнитным помехам — идеально подходит для приложений, критичных к безопасности (например,грамм. транспортных средств)
- Эффективный : кадры CAN имеют приоритет по номерам идентификаторов. Данные с наивысшим приоритетом получают немедленный доступ к шине, не вызывая прерывания других кадров.
- Сниженная масса автомобиля : за счет исключения километров сильно изолированных электрических проводов и их веса от транспортного средства.
- Easy Deployment : проверенный стандарт с обширной экосистемой поддержки.
- Устойчивость к электромагнитным помехам : это делает CAN идеальным решением для критически важных приложений в транспортных средствах.
CAN имеет отличные возможности управления и обнаружения неисправностей. Обнаружить ошибку легко, и, таким образом, переданные данные попадают туда, куда им нужно.
Это идеальный протокол, когда требуется распределенное управление сложной системой. Это уменьшает тяжелую проводку и, следовательно, снижает стоимость и вес. Стоимость микросхем невысока, а реализация CAN относительно проста благодаря чистому дизайну протокола.
Еще одно преимущество использования CAN состоит в том, что первые два уровня: физический уровень и уровень канала передачи данных реализованы в недорогих микрочипах, доступных в нескольких конфигурациях.
Популярные приложения CAN-шины
Сегодня приложения для CAN преобладают в автомобильной и автомобильной промышленности, но этим не ограничиваются. CAN можно найти практически во всех отраслях. Вы можете найти используемый протокол CAN в:
- Все виды транспортных средств: мотоциклы, автомобили, грузовики …
- Телематика для тяжелых условий эксплуатации
- Самолеты
- Лифты
- Производственные предприятия всех видов
- Корабли
- Медицинское оборудование
- Системы профилактического обслуживания
- Стиральные машины, сушилки и прочая бытовая техника.
Краткая история CAN-шины
Когда вы щелкаете выключателем в доме, чтобы включить свет, электричество проходит через выключатель к свету. В результате переключатели и проводка должны быть тяжелыми и достаточно изолированными, чтобы выдерживать максимальный ожидаемый ток. Стены вашего дома залиты этой тяжелой изолированной проводкой.
Раньше легковые и грузовые автомобили были подключены точно так же: с тех пор, как Генри Форду пришла в голову идея добавить в свои автомобили фары и электрический гудок в 1915 году, электричество текло от батареи через переключатели к фарам и другим устройствам.К 1960-м годам через каждую машину были протянуты тысячи тяжелых проводов. Каждый лишний вес снижает топливную экономичность автомобиля.
Автомобиль с предварительно установленной шиной CAN, внутри которого проложены толстые провода на несколько километров / километров.
Авторские права Райан Макгуайр с сайта Pixabay.
После нефтяного эмбарго 1970-х годов на производителей автомобилей оказывалось все большее давление, чтобы они повышали свою топливную эффективность. Поэтому они начали искать способы уменьшить вес машин, которые они производили.
Типовая электропроводка в легковом автомобиле
Изображение предоставлено Transparency Market Research
К началу 1980-х годов в автомобилях было все больше и больше ЭБУ (электронных блоков управления) внутри, и такие компании, как компания Robert Bosch из Германии, искали тип системы связи по шине, который можно было бы использовать в качестве системы связи между несколькими ЭБУ и автомобилем. системы. Они искали рынок, но не смогли найти именно то, что им нужно, поэтому они начали разработку «Controller Area Network» в партнерстве с производителем автомобилей Mercedes-Benz и производителем полупроводников Intel®, а также несколькими университетами в Германии.
В 1986 году компания Bosch представила стандарт CAN на Конгрессе SAE в Детройте. Год спустя корпорация Intel начала поставки первых микросхем CAN-контроллеров, и автомобильный мир изменился навсегда. Оглядываясь назад, можно сказать, что снижение веса в результате разработки CAN было почти удачным побочным продуктом, но тем не менее вполне реальным.
В современных легковых и грузовых автомобилях тяжелый кабель заменяется легким 2-проводным CAN
Как работает обмен сообщениями CAN?
Устройства на шине CAN называются «узлами».Каждый узел состоит из ЦП, контроллера CAN и приемопередатчика, который регулирует уровни сигналов как данных, отправляемых и принимаемых узлом. Все узлы могут отправлять и получать данные, но не одновременно.
Узлы не могут отправлять данные друг другу напрямую. Вместо этого они отправляют свои данные в сеть, где они доступны любому узлу, которому они были адресованы. Протокол CAN работает без потерь и использует метод побитового арбитража для разрешения конфликтов на шине.
Все узлы синхронизированы, поэтому все они одновременно производят выборку данных в сети.Однако данные не передаются с данными часов (времени), поэтому CAN на самом деле не является синхронной шиной, такой как, например, EtherCAT.
С CAN все данные отправляются в кадрах, и есть четыре типа:
- Кадры данных передают данные на один или несколько узлов-получателей
- Удаленные кадры запрашивают данные с других узлов
- Кадры ошибок сообщают об ошибках
- Кадры перегрузки сообщают об условиях перегрузки
Возможны два варианта длины сообщения: стандартный и расширенный.Настоящая разница заключается в дополнительном 18-битном идентификаторе в поле арбитража.
Стандартный и расширенный фреймы архитектуры сообщения данных CAN
Структура сообщения данных CAN (кадр CAN)
| Поле | Биты | Описание |
|---|---|---|
| SOF | 1 | Единственное доминирующее начало кадра. Этот бит отмечает начало сообщения. Он синхронизирует узлы после периода простоя. |
| Идентификатор | 11 | 11-битное поле данных идентификатора CAN устанавливает приоритет сообщения. Более низкие значения означают более высокие приоритеты. |
| РТР | 1 | Запрос удаленной передачи. Этот бит является доминирующим, когда информация запрашивается другим узлом. Все узлы получат запрос, но идентификатор определяет желаемый узел. |
| IDE | 1 | Бит расширения идентификатора указывает, что передается стандартный идентификатор CAN (не расширенный). |
| R0 | 1 | Зарезервировано для использования в будущем. |
| DLC | 4 | Код длины данных содержит количество байтов в передаче. |
| Данные | 0–64 | Фактические передаваемые данные. |
| CRC | 16 | 16-битный (15 бит плюс разделитель) циклический избыточный контроль (CRC) содержит контрольную сумму (количество переданных битов) данных предыдущего приложения для обнаружения ошибок передачи. |
| ACK | 2 | Когда узел успешно принимает сообщение, он подтверждает его, перезаписывая этот бит доминирующим битом. С другой стороны, если узел обнаруживает ошибку в сообщении, он позволяет этому биту оставаться рецессивным и игнорирует сообщение. Слот ACK и разделитель ACK имеют длину один бит. |
| EOF | 7 | Конец кадра — это 7-битное поле, которое обозначает конец каждого кадра (сообщения) CAN. |
| IFS | 3+ | Межкадровое пространство (IFS) — это время, необходимое контроллеру для перемещения кадра (сообщения) в позицию в буферной области. Обратите внимание, что IFS содержит минимум три последовательных рецессивных (1) бита. После прохождения трех рецессивных битов, когда обнаруживается доминирующий бит, он становится битом SOF следующего кадра. |
Если присмотреться к битовым полям сообщений передачи данных CAN
Поле арбитража содержит идентификационный номер сообщения и бит запроса удаленной передачи.Более важные сообщения имеют более низкие идентификационные номера.
Если несколько узлов передают одновременно, они начинают одновременный арбитраж. Узел с наименьшим идентификатором сообщения получает приоритет. Доминантные биты перезаписывают рецессивные биты на шине CAN.
Идентификатор сообщения может иметь длину , 11 бит, (стандартный CAN, 2048 различных идентификаторов сообщений) или 29 бит (расширенный CAN, 537 миллионов различных идентификаторов сообщений). Бит запроса удаленной передачи является доминирующим и указывает, что данные передаются.
В большинстве систем логическая 1 представляет высокий уровень, а логический 0 — низкий. Но на CAN-шине все наоборот. Поэтому трансиверы CAN обычно используют подтяжку на входах драйвера и выходах приемника, так что устройства по умолчанию перешли в рецессивное состояние шины.
Варианты CAN-шины
Стандарт ISO 11898 определяет несколько версий CAN. В автомобильной промышленности преобладают следующие типы CAN:
Низкая скорость CAN
Используется для отказоустойчивых систем, не требующих высокой частоты обновления.Максимальная скорость передачи данных составляет 125 кбит / с, но, таким образом, проводка более экономична, чем высокоскоростной CAN. В автомобильных приложениях низкоскоростная CAN используется для диагностики, управления и индикации приборной панели, стеклоподъемников и т. Д.
Высокая скорость CAN
Используется для связи между критически важными подсистемами, которым требуется высокая частота обновления и высокая точность данных (например, антиблокировочная тормозная система, электронный контроль устойчивости, подушки безопасности, блоки управления двигателем и т. Д.). Скорость передачи данных высокоскоростной CAN колеблется от 1 кбит до 1 Мбит в секунду.
Высокоскоростной CAN быстрее, чем низкоскоростной, но требования к пропускной способности новых автомобильных приложений растут с каждым годом, поэтому производители автомобилей теперь устанавливают CAN FD в новые автомобили. CAN FD насмешливо описывают как «CAN на стероидах».
CAN FD (CAN с гибкой скоростью передачи данных)
Последняя версия CAN обеспечивает гибкую скорость передачи данных, больше данных в сообщении и гораздо более высокую скорость передачи. Длина данных в каждом стандартном (низкоскоростном и высокоскоростном) сообщении CAN составляет 8 байтов, но с CAN FD он был увеличен на 800% до 64 байтов данных.Кроме того, максимальная скорость передачи данных также резко увеличена с 1 Мбит / с до 8 Мбит / с.
Формат кадра данных CAN FD
CAN FD также имеет обратную совместимость и поддерживает протокол связи CAN 2.0, а также специальные протоколы, такие как SAE J1939, где CAN out используется только для чтения. CAN FD по сути является расширением исходного стандарта CAN, как указано в ISO 11898-1, и полностью совместим с классическими системами CAN.
CAN FD — важный шаг вперед, потому что он позволяет ЭБУ динамически изменять скорость передачи и выбирать больший или меньший размер сообщений в зависимости от требований реального времени.Сейчас он встречается в высокопроизводительных транспортных средствах, но по мере роста производительности ECU и снижения затрат на оборудование CAN FD, появление CAN FD практически во всех транспортных средствах — лишь вопрос времени.
Многие продукты Dewesoft имеют встроенные интерфейсы низко- / высокоскоростной шины CAN, включая SIRIUS (и инструменты на базе SIRIUS, включая R1, R2, R3, R4, R8, R8rt), DEWE-43A и MINITAUR. Все эти модели включают одну шину CAN, за исключением DEWE-43A, у которой их две. Дополнительные интерфейсы CAN-шины могут быть добавлены к любой системе Dewesoft с использованием имеющихся интерфейсов с 1, 2, 4 и даже 8 портами.
Интерфейсы CAN-шины доступны почти в каждой системе Dewesoft DAQ
Если требуется CAN FD, KRYPTONi-1xCAN-FD — это однопортовое устройство CAN FD, которое использует EtherCAT в качестве интерфейса данных. Он поддерживает высокоскоростные интерфейсы CAN со скоростью передачи данных до 8 Мбит / с. Кроме того, CAN FD поддерживает протокол связи CAN2.0, а также специальные протоколы, такие как J1939, где CAN out используется только для чтения. KRYPTONi-1xCAN-FD использует гальванически изолированные линии связи и изолированное питание датчиков +5 В и +12 В.Предел мощности питания датчика 1,4 Вт.
Прочный и водонепроницаемый KRYPTONi-1xCAN-FD с интерфейсом EtherCAT
Этот очень маленький модуль CAN FD может быть добавлен к любому прибору Dewesoft DAQ, имеющему порт EtherCAT, который включает всю линейку SIRIUS и, конечно же, саму линию KRYPTON.
Дополнительные стандарты и протоколы CAN
Зачем нужны дополнительные стандарты и протоколы «поверх» CAN? Это просто потому, что, хотя CAN — элегантный и надежный протокол, на самом деле это все.Это система обмена сообщениями, но она не включает никаких способов анализа или понимания данных в сообщениях. Вот почему несколько компаний создали дополнительные стандарты и протоколы, которые работают в CAN или поверх нее, обеспечивая дополнительные функции. Наиболее известные из них:
SAE J1939 на CAN
Протокол SAE J1939 изначально был разработан для использования на тяжелых грузовиках и тягачах с прицепами в США. Сегодня он используется производителями дизельных двигателей во всем мире.J1939 — это протокол более высокого уровня, работающий на физическом уровне CAN. Он предоставляет некоторые полезные функции, характерные для тяжелых грузовиков, таких как 18-колесные грузовики.
SAE на схеме CAN
Протокол имеет несколько ограничений, которые были намеренно введены для обеспечения максимально возможной надежности, включая ограничение идентификатора сообщения до 29 бит и ограничение скорости шины до 250 или 500 кбит / с.
Экран настройки шины CAN в программе DewesoftX.Обратите внимание на флажок J1939 в левом верхнем углу.
ПрограммаDewesoftX позволяет инженеру выбрать декодирование J1939 с помощью флажка на экране настройки CAN для любого доступного порта CAN. Конечно, это предполагает, что сообщения на шине CAN отформатированы в соответствии со стандартом J1939. Сообщения данных имеют ту же длину, что и расширенный стандарт CAN.
Поле арбитража содержит дополнительный адрес источника и назначения, а скорость передачи ограничена 250 или 500 кбит / с, в зависимости от используемой стандартной версии J1939.J1939 — это выбор на стандартном экране настройки Dewesoft X CAN — дополнительное оборудование или программное обеспечение не требуется.
OBD II (он же «OBD 2»)
Этот бортовой диагностический порт имеется во всех автомобилях, выпущенных с 1989 года. Обычно расположенный в пределах 2 футов (0,61 метра) от рулевого колеса, это интерфейс, который позволяет автомастерским, а также владельцам транспортных средств диагностировать проблемы с автомобилем, подключая сканирующий инструмент к его 16-контактному разъему. (На фото под рулем в Toyota 4Runner 2016 года).
Разъем OBD II на автомобиле
могут считывать DTC (диагностические коды неисправностей), сообщаемые автомобилем. Интерфейс OBD II необходим для передачи десятков каналов данных в реальном времени, таких как обороты, скорость автомобиля, температура охлаждающей жидкости и т. Д. Интерфейсы CAN Dewesoft могут быть подключены к этому разъему OBD II, как показано ниже, и могут считывать, отображать и записывать любой или все эти каналы синхронно с другими записываемыми данными.
Разъем OBD II (слева), подключенный к разъему интерфейса CAN Dewesoft (справа)
Только часть экрана настройки ODB II в программе DewesoftX
Для декодирования, отображения и записи сообщений ODB II в системах Dewesoft требуется дополнительный программный плагин ODB II.С помощью этой системы вы можете сканировать DTC (диагностические коды неисправностей) и многое другое.
XCP / CCP на CAN и Ethernet
Универсальный протокол измерений и калибровки (XCP) был разработан для подключения ЭБУ к системам калибровки. Слово «универсальный» в его названии указывает на то, что он может работать поверх CAN-шины, CAN FD, FlexRay, Ethernet и других. Он является преемником оригинального протокола калибровки CAN (CCP), разработанного в 1990-х годах.
Dewesoft поддерживает протоколы XCP / CCP через плагины XCP / CCP Master и XCP / CCP Slave, которые работают в программном обеспечении DewesoftX DAQ.Можно использовать стандартное оборудование интерфейса Dewesoft CAN (и Ethernet).
Видео презентации Dewesoft XCP
В дополнение к этим подключаемым модулям XCP Slave и Master, системы сбора данных SIRIUS XHS и IOLITE LX от Dewesoft могут изначально передавать данные через XCP в Ethernet без необходимости в дополнительном программном обеспечении. Пожалуйста, посмотрите это короткое вводное видео для получения дополнительной информации о системах сбора данных Dewesoft XCP и регистраторах данных XCP:
CANopen
CANopen — это протокол более высокого уровня, который используется для встроенных приложений управления.Поскольку он основан на протоколе обмена сообщениями CAN, системы сбора данных и регистраторы данных, которые могут считывать и записывать данные CAN, также могут получать доступ к данным из CANopen.
CANopen был изобретен для обеспечения легкого взаимодействия между устройствами в системах управления движением. Связь между устройствами реализована на высоком уровне, также поддерживается конфигурация устройства. Он широко используется в приложениях для управления движением, робототехники и управления двигателем.
CANopen управляется международной организацией CAN in Automation — CiA.CiA, основанная в Германии в 1992 году, является некоммерческой международной группой пользователей / производителей CAN. Они гордятся тем, что являются беспристрастной платформой для разработки протокола CAN и для продвижения имиджа технологии CAN.
CANopen предоставляет несколько дополнительных концепций, в том числе:
Три базовые модели связи
- Главный / подчиненный — где один узел является «главным», а все остальные — подчиненными.
- Клиент / Сервер — несколько похож на главный / подчиненный, за исключением того, что узлы являются серверами данных по запросу к клиентскому узлу.
- Производитель / Потребитель — где определенные узлы настроены на автоматическое создание определенных видов данных, в то время как другие узлы настроены на их использование.
Два основных протокола связи
- SDO для конфигурации узла
- PDO для отправки данных в реальном времени
Профили устройств
- CiA 401 Модули ввода / вывода
- CiA 402 — управление движением для независимости от производителя
Словарь объектов
Существует OD (словарь объектов) для каждого устройства в сети.OD имеет стандартную конфигурацию данных, которая определяет конфигурацию каждого устройства в сети.
Состояния устройства
Главный узел может изменять или сбрасывать состояние устройств в сети.
Электронные таблицы данных (ЭЦП)
EDS — это стандартный формат файла для записей OD, позволяющий, например, сервисные инструменты для обновления устройств
Связи между концепциями и возможностями CANopen
Помимо CAN и работающих на нем протоколов, описанных в предыдущих разделах, существуют другие коммуникационные шины, которые используются для автомобильных приложений:
В современных автомобилях используется комбинация нескольких шин данных.Давайте посмотрим на каждый из них и посмотрим, как они соотносятся с шиной CAN.
В современных транспортных средствах используется несколько автобусов
Изображение © 2020 Renesas Electronics Corporation
MOST (Транспорт мультимедийных систем)
Все ожидают, что их новая машина будет иметь лучшую и более функциональную развлекательную систему, чем их предыдущая машина. Старомодное радио AM / FM, которое было стандартом более 50 лет, было преобразовано, чтобы принимать съемные носители, от старых времен кассет и 8-трековых лент до компакт-дисков (CD) и съемных флэш-носителей.Сегодня основное внимание уделяется потоковой передаче контента с мобильных устройств, а также спутниковому радио (SIRIUS / XM® в Северной Америке).
Автобус MOST — транспорт для мультимедийных систем
Изображение предоставлено Pixabay
Media-Oriented Systems Transport ( MOST ) — это стандартная шина, используемая для соединения автомобильных развлекательных и информационных систем, разработанная партнерством автопроизводителей под названием «Сотрудничество MOST». Он предлагает скорости передачи данных 25, 50 и 150 Мбит / с.Но следует отметить, что это совокупные скорости, которые делятся между всеми узлами на шине.
MOST используется почти во всех автомобильных марках по всему миру. К кольцевой сети MOST можно подключить до 64 устройств, что позволяет легко подключать и отключать устройства. Возможны и другие топологии, в том числе виртуальные звезды. Существуют различные версии MOST , в том числе:
- MOST25 предлагает максимальную скорость потоковой передачи 23 МБ, которая на самом деле ограничена примерно 10 кБ / с из-за накладных расходов протокола и других ограничений.
- MOST50 удваивает пропускную способность MOST25.
- MOST150 утраивает пропускную способность MOST50 и добавляет физический уровень, который позволяет добавить Ethernet.
MOST сталкивается с растущей конкуренцией со стороны автомобильного Ethernet, что обсуждается ниже.
Автомобильный Ethernet
Новые технологии, такие как помощь водителю и даже функции автономного вождения / автономного транспортного средства, требуют все более высокой пропускной способности для работы.Эта потребность в скорости в сочетании с низкой стоимостью оборудования Ethernet стала важным фактором в продвижении автомобильного Ethernet среди автопроизводителей. Другие мотивы для автомобильной сети Ethernet включают скорость передачи данных, необходимую для LIDAR и других датчиков, необработанных данных камеры, данных GPS, картографических данных и плоских дисплеев с более высоким и высоким разрешением.
Автомобильный Ethernet
Изображение © 2017 OPEN Alliance SIG
Но в отличие от наших комфортных домашних и офисных помещений, автомобиль подвержен гораздо более широкому диапазону температур, ударов и постоянных вибраций.Кроме того, существуют EMI и RFI, которые необходимо заблокировать, чтобы не создавать помех для критически важных данных, особенно тех, которые связаны с помощью водителю и предотвращением столкновений.
Термин «автомобильный Ethernet» не относится к конкретному стандарту как таковому. Он включает в себя любую сеть на основе Ethernet, используемую в транспортных средствах. Он также относится к стандарту OPEN Alliance BroadR-Reach, разработанному Broadcom, и к IEEE 802.3bw-2015, также известному как 100Base-T1.
Несмотря на очевидные преимущества скорости и всемирной популярности, до недавнего времени Ethernet использовался только для диагностических приложений в автомобилях — другими словами, когда автомобиль находился в сервисном режиме и не двигался.Почему? Из-за его восприимчивости к EMI (электромагнитным помехам) и RFI (радиочастотным помехам), отсутствию присущей детерминированной временной синхронизации и склонности к выходу из строя разъема из-за вибрации. Например, стандартные разъемы CAT5 не могут выжить в автомобилях при нормальном использовании.
Однако эти проблемы решаются рабочими группами IEEE 802.3 и 802.1. Тем временем производитель микросхем Broadcom разработал BroadR-Reach ™, который адаптирует технологию Ethernet для использования в автомобилях.BroadR-Reach обеспечивает скорость 100 Мбит / с при использовании неэкранированной витой пары на расстоянии до 15 метров или до 40 метров, если к кабелям добавлен экран.
Топология автомобильного Ethernet BroadR-Reach. Микросхемы физического уровня Broadcom
одновременно отправляют и принимают данные в двух направлениях
BroadR-Reach был принят некоторыми автопроизводителями для использования в информационно-развлекательных системах, системах помощи водителю, бортовой диагностике и даже в приложениях ADAS. Он предлагает скорость передачи данных 100 Мбит / с на порт, что намного выше, чем, например, совокупная скорость MOST 150 Мбит / с.
Стандарт BroadR-Reach контролируется альянсом OPEN (One-Pair Ether-Net), который выступает за внедрение автомобильного Ethernet.
Ethernet AVB (мост аудио-видео) — это стандарт IEEE AVB1.0. Он приближается к использованию с камерами и мультимедийными системами. AVB2.0 предназначен для приложений управления транспортными средствами. AVB продвигается Альянсом AVnu.
Ethernet TSN (Time-Sensitive Networking) — это стандарт IEEE 802.1, разработанный для обеспечения детерминированного обмена сообщениями через стандартный Ethernet.Не протокол как таковой, TSN — это стандарт, реализованный на уровне 2 Ethernet OSI, то есть на уровне данных (AVB также является стандартом уровня 2).
В качестве расширения Ethernet AVB, описанного выше, TSN фокусируется на временной синхронизации, планировании и формировании пакетов, которые необходимы для приложений самоуправляемых транспортных средств. Поскольку TSN полностью посвящен «времени», протоколы точного времени (PTP) IEEE 802.1AS и IEEE 802.1ASRev были выбраны для обеспечения общей концепции времени на всех устройствах.
По данным Gartner, в 2017 году в потребительских транспортных средствах было установлено в общей сложности 19,3 миллиона портов Ethernet. К 2020 году эта цифра увеличится до 122,8 миллиона, а к 2023 году эта цифра, по прогнозам, удвоится.
ОТПРАВЛЕН SAE-J2716
SENT SAE-J2716 (односторонняя полубайтовая передача) был разработан как недорогая альтернатива протоколу CAN или LIN. Это односторонний протокол передачи, который позволяет датчикам отправлять свои данные в ЭБУ.
Данные кодируются с использованием импульсной кодовой модуляции (ИКМ) и передаются по одному проводу.Всего имеется три провода: сигнальный, заземляющий и силовой. Данные кодируются 4-битными «полубайтами».
Типичное сообщение SENT — 32 бита (8 полубайтов), состоит из:
- Данные сигнала: 24 бита (6 полубайтов)
- Обнаружение ошибок CRC: 4 бита (1 полубайт)
- Информация о состоянии: 4 бита (1 полубайт)
Фрейм сообщения SAE-J2716
Также возможно сконфигурировать сообщения из 20 бит (5 полубайтов), где данные только 12-битные (3 полубайта).
Благодаря модуляции данных, SENT идеально подходит для использования в среде с электрическими помехами.
Системы Dewesoft поддерживают данные SENT SAE-J2716, используя каналы счетчиков для считывания сигнала SENT, передаваемого датчиком. Два быстрых канала и любое количество медленных каналов, которые могут быть обнаружены автоматически. Инженеры могут декодировать сигналы SENT от нескольких датчиков одновременно, когда каждый датчик использует свой счетчик, путем добавления нескольких окон модулей. Каналы SENT доступны как каналы Dewesoft.
FlexRAY
FlexRAY — это протокол, используемый для динамических автомобильных приложений, таких как управление шасси. Он был создан в 2005 году консорциумом FlexRAY, но с тех пор стандартизирован в соответствии с ISO 17458-1 до 17458-5.
FlexRAY передает данные по одному или двум неэкранированным кабелям витой пары. Он работает со скоростью 10 Мбит / с и поддерживает одно- или двухпроводные конфигурации. Поддерживаются шинные, звездообразные и гибридные сетевые топологии со скоростью до 10 Мбит / с. Дифференциальная сигнализация снижает уровень шума без необходимости использования экранированных кабелей, что увеличивает стоимость и вес.
Как и в случае с CAN, только один узел может писать в шину FlexRAY одновременно. CAN использует бит арбитража, чтобы определить, какие данные получают приоритет и которым разрешено продолжить. FlexRAY, с другой стороны, использует метод множественного доступа с временным разделением (TDMA), при котором каждый узел с синхронизацией по времени должен ждать своей очереди для отправки сообщения. Это позволяет избежать коллизий и обеспечивает более высокую общую пропускную способность данных по шине из-за высокой общей скорости передачи данных по шине.
FlexRAY часто реализуется в классической многоточечной топологии, совместно используемой LIN и CAN, однако ее также можно настроить в топологии «звезда».Топология «звезда» имеет то преимущество, что не позволяет неисправности проводки затронуть более одного узла. FlexRAY также может быть реализован в смешанной топологии, как показано ниже.
Топологии сети: слева: многоточечная, по центру: звезда, справа: смешанная
FlexRAY чаще всего используется для высокопроизводительных силовых агрегатов, систем безопасности и активного управления шасси. FlexRAY дороже реализации CAN-шины.
Однако, когда используются двойные пары параллельных линий данных, это обеспечивает избыточность: когда линия повреждена, вторая линия может занять ее.Это важно для критически важных приложений, таких как рулевое управление и торможение. В некритичных приложениях FlexRAY обычно используется одна витая пара.
Системы Dewesoft могут легко получать данные FlexRAY с помощью опции импорта библиотеки FIBEX. Доступен программный плагин для поддержки всех интерфейсных карт Vector FlexRay.
Шина LIN — локальная межкомпонентная сеть
ШинаLIN — недорогая альтернатива шине CAN. Это очень просто, но обязательно ограничено одним главным и 15 подчиненными узлами.LIN — это последовательная однонаправленная система обмена сообщениями, в которой ведомые устройства прослушивают адресованные им идентификаторы сообщений.
Из-за низкой пропускной способности и ограничений по количеству узлов LIN обычно используется для управления небольшими электродвигателями и элементами управления. LIN ограничен скоростью передачи данных 19,2 кбит / с или 20 кбит / с.
Регулируемые элементы управления автокреслом в Mercedes-Benz
Изображение предоставлено Pixabay
LIN — это однопроводная сеть, определенная стандартом ISO 9141. Она используется для приложений с низкой пропускной способностью, таких как электрические окна, освещение, дверные замки, системы ввода карточек-ключей, электрические зеркала, сиденья с электроприводом и т. Д.
Плагин шины LIN для DewesoftX позволяет инженерам подключаться и прослушивать обмен данными в нескольких сетях LIN. Используя оборудование LIN BUS марки Vector, он имитирует подчиненные устройства, работающие только с прослушиванием, которые прослушивают все данные, передаваемые по шине. Расшифровка может быть выполнена в трех разных формах:
- Аналоговые данные с широкими возможностями масштабирования
- Дискретные данные
- Смесь обоих
Плагин поддерживает импорт конфигурации из файлов описания LIN (LDF).Для чтения шины LIN требуется карта Vector LIN BUS.
Сравнение CAN с автобусами других транспортных средств
| ЛИН | МОЖНО | CAN FD | FlexRay | МОСТ | Ethernet | |
|---|---|---|---|---|---|---|
| Скорость | 10-20 кбит / с | 1 Мбит / с | 8 Мбит / с | 10 Мбит / с | 150 Мбит / с (общая) | 100 Мбит / с (на узел) |
| Размер данных | 8 B | 8Б | 64 B | 254 B | 370 B | 1500 В |
| Кабели | однопроводной | UTP * | UTP | UTP | UTP или оптоволокно | UT |
| Топология | Автобус | Автобус | Автобус / пассивная звезда | Автобус / Звезда / Смешанный | Кольцо | Звезда / Дерево / Кольцо |
| Где используется | Датчики, исполнительные механизмы (фары, зеркала и т. Д.) | Магистраль, Кузов, Шасси, Трансмиссия | Кузов, трансмиссия, распределенное управление, шасси | Высокопроизводительная трансмиссия, Магистраль, Электропроводка, Шасси | Информационно-развлекательные системы | Диагностика, программирование ЭБУ, информация и развлечения |
| Обнаружение ошибок | 8-битный CRC | 15-битный CRC | 17 или 21 бит CRC | 24-битный CRC | CRC | 32-битный CRC |
| Резервирование | НЕТ | НЕТ | НЕТ | Есть | Есть | НЕТ |
| Детерминизм | НЕТ | НЕТ | НЕТ | Есть | Есть | Не присуще |
| Стоимость | $ | $$ | $$$ | $$$ | $$ | $$ |
Сравнение автомобильных автобусов на высоком уровне
Примечания: * UTP = неэкранированная витая пара
Как и в случае любой сетевой и интероперабельной системы, выбор автомобильной шины лучше всего зависит от требований приложения с учетом затрат и прогнозируемых отраслевых требований и тенденций.Ясно, что автопроизводители не хотят внедрять старые автобусы в новые конструкции, когда есть лучшие автобусы по эквивалентной или более высокой стоимости развертывания.
Dewesoft CAN Bus DAQ системы
Интерфейсы шины CAN, входящие в стандартную или дополнительную комплектацию систем Dewesoft, обеспечивают высокий уровень возможностей, а также возможность расширения до дополнительных протоколов.
Модуль Dewesoft SIRIUS DAQ, записывающий аналоговые, цифровые данные и данные транспортного средства по шине CAN
Все CAN-интерфейсы Dewesoft имеют гальваническую развязку , защищающую прибор и подключенные устройства от контуров заземления и других электрических помех.Все CAN-интерфейсы Dewesoft используют высокоскоростной стандарт CAN 2.0b . Dewesoft также предлагает устройство CAN FD .
Все интерфейсы CAN Dewesoft могут как читать, так и записывать сообщений CAN, что позволяет инженерам передавать сообщения на шину для запроса данных от устройств CAN в сети и т. Д.
Все интерфейсы CAN Dewesoft можно настроить за секунды, поскольку прилагаемое программное обеспечение для сбора данных DewesoftX может импортировать файлы DBC. Файлы DBC — это стандартный формат, который позволяет инженерам разбивать поток данных на отдельные каналы с именами, масштабированием, соответствующими инженерными единицами и т. Д.
Главный экран настройки DewesoftX CAN
При нажатии кнопки «Настройка» справа от любого ряда сообщений открывается экран настройки канала CAN, показанный ниже:
Экран настройки канала шины CAN DewesoftX, показывающий пять различных каналов, содержащихся в одном сообщении
DewesoftX упрощает настройку каналов CAN. Программное обеспечение может импортировать и экспортировать файлы CAN DBC или XML. Файлы DBC являются общими файлами для сообщений CAN и определения каналов.После импорта программа автоматически настроит все доступные каналы CAN и расшифрует сообщения CAN.
Возможности программного обеспечения DewesoftX CAN
- Расширенная запись, хранение и анализ CAN
- Он-лайн мониторинг и декодирование сообщений CAN
- Расшифровка сообщений CAN в автономном режиме
- Визуальный дисплей для отображения данных CAN
- Онлайн и офлайн математический анализ каналов CAN
- Импорт и экспорт файлов CAN DBC
- OBDII на CAN, J1939 и XCP / CCP поддерживает
- Функция передачи CAN
Интерфейсы CAN-шины Dewesoft
Компания Dewesoft была среди первых производителей систем сбора данных, которые полностью реализовали интерфейсы шины CAN со своей системой сбора аналоговых данных.Почти каждая DAQ-система Dewesoft имеет по крайней мере один встроенный интерфейс CAN-шины в стандартной комплектации, а дополнительный выделенный CAN-интерфейс может быть добавлен внутри, снаружи или вместе, сохраняя при этом идеальную синхронизацию.
Многоканальные интерфейсы CAN и CAN FD Dewesoft
Еще в 2008 году была представлена оригинальная модель DEWE-43, оснащенная двумя высокоскоростными интерфейсами CAN-шины в качестве стандартной функции. Очень важно знать, что данные CAN, поступающие в эти порты, полностью аппаратно синхронизированы с аналоговыми данными, а также с данными счетчика / цифрового входа.Интерфейс CAN Dewesoft также гальванически изолирован, что защищает прибор и саму шину от контуров заземления и других электрических проблем.
DEWE-43A, с 8 многофункциональными аналоговыми входами, 8 счетчиками / таймером / цифровыми входами и 2 изолированными высокоскоростными интерфейсами шины CAN
Менее чем через год после своего появления DEWE-43 был удостоен награды NASA TECH BRIEFS Reader’s Choice Product of the Year за инновации в объединении абсолютной мощности и возможностей сбора данных в невероятно компактном приборе.
Сегодня Dewesoft предлагает поддержку нескольких стандартных автомобильных интерфейсов для анализа и проверки данных автомобильной шины. Данные могут быть захвачены со всех поддерживаемых интерфейсов и синхронизированы с другими источниками, такими как аналоговые, видео и другие.
Системы сбора данных Dewesoft со встроенными интерфейсами CAN
Как упоминалось ранее, почти каждая система Dewesoft DAQ имеет по крайней мере один встроенный порт CAN в стандартной комплектации, и все системы могут быть оснащены CAN, если он не является стандартным, согласно этой таблице:
* «Внешний» означает, что можно добавить один или несколько внешних синхронизируемых интерфейсов CAN.К ним относятся DS-CAN2, SIRIUSim-4X-CAN, SIRIUSf-8x-CAN и KRYPTONi-1xCAN-FD.
Внешние синхронизируемые интерфейсы CAN
В дополнение к портам CAN, встроенным почти в каждую систему сбора данных Dewesoft, доступны отдельные синхронизируемые интерфейсы CAN с 2, 4 и 8 портами. Они подключаются либо к компьютеру под управлением Windows, на котором установлено программное обеспечение Dewesoft X, либо к системе Dewesoft DAQ через USB и кабель синхронизации.
Слева направо: DS-CAN2, SIRIUSim-4xCAN, SIRIUSf-8x-CAN
Эти модули имеют 2, 4 и 8 портов CAN соответственно
KRYPTONi-1xCAN-FD Модуль
Последний представитель семейства CAN-шин Dewesoft — это KRYPTONi-1xCAN-FD .Это однопортовое устройство CAN FD, которое подключается к системе сбора данных через EtherCAT®. Он поддерживает высокую скорость передачи данных CAN до 8 Мбит / с. Кроме того, CAN FD поддерживает протокол связи CAN 2.0, а также специальные протоколы, такие как J1939.
Размер модуля KRYPTONi 1xCAN-FD составляет всего 62 x 56 x 29 мм (2,44 x 2,20 x 1,14 дюйма)
KRYPTONi-1xCAN-FD имеет гальванически развязанных линий связи и изолированное питание датчика на +5 В и +12 В.Предел мощности питания датчика — 1,4 Вт.
Поскольку этот модуль является членом отмеченной наградами линейки продуктов KRYPTON ONE, он может выдерживать экстремальные условия окружающей среды, такие как диапазон рабочих температур от -40 ° C до +85 ° C (от -40 до + 185 ° F), и защищен от пыли и жидкостей согласно IP67.
KRYPTONi-1xCAN-FD поставляется в стандартном шасси KRYPTON ONE с входным разъемом DSUB9.
Больше чтения:
Протокол CAN-шины — 10-минутный урок
Введение в шину CAN:CAN (сеть контроллеров) — это двухпроводной протокол дифференциальной последовательной связи, используемый для управления в реальном времени.Протокол CAN-шины был первоначально разработан для автомобильной промышленности — для подключения трансмиссии, подушек безопасности, антиблокировочной системы тормозов / ABS, круиз-контроля, электроусилителя руля, аудиосистем, электрических стеклоподъемников, дверей, регулировки зеркал, аккумуляторной батареи и систем зарядки для гибридных / электромобили и др.
CAN — это система широковещательной передачи сообщений с несколькими ведущими (одноранговая сеть), которая определяет максимальную скорость передачи сигналов от 125 кбит / с до 1 Мбит / с. Он предусматривает 2048 различных идентификаторов сообщений.
была разработана компанией Robert Bosch GmbH в 1983 году. CAN-шина является одним из пяти протоколов, используемых в стандарте бортовой диагностики (OBD) -II. Ежегодно продается около 1 миллиарда CAN-узлов.
Конкурентные преимущества и применениеПреимущества:
- Низкая стоимость : ЭБУ (ECU = Electronic Control Units) обмениваются данными через единственный интерфейс CAN, т.е. не используют прямые аналоговые сигнальные линии, что снижает количество ошибок, вес и затраты.
- Централизованный : Система шины CAN позволяет выполнять централизованную диагностику ошибок и настройку всех ЭБУ.
- Надежность : Система устойчива к отказам подсистем и электромагнитным помехам.
- Эффективный : сообщения CAN имеют приоритет через идентификаторы, так что идентификаторы наивысшего приоритета не прерываются.
- Гибкий : Каждый ЭБУ содержит микросхему для приема всех передаваемых сообщений, определения актуальности и соответствующих действий — это позволяет легко изменять и включать дополнительные узлы
Рис.1: Пример CAN и без CAN в автомобильном приложении
Шина CAN широко используется в:
- Транспортные системы (железнодорожные, авиационные, морские и т. Д.)
- Системы управления промышленными машинами
- Домашняя автоматизация и автоматизация зданий (например, HVAC, лифты)
- Машины мобильные (строительная и с / х техника)
- Медицинские устройства и лабораторная автоматизация, а также во многих других встроенных и глубоко встроенных приложениях.
Рис.2: CAN BUS Архитектура OSI
Высокая скорость CAN (CAN 2.0B)
- Скорость: до 1 Мбит / с
- Диапазон: 40 м
- 29-битный идентификатор сообщения
- Оконечная нагрузка с резистором 120 Ом
Низкая скорость CAN (CAN 2.0A)
- Скорость: до 125 Кбит / с
- Дальность полета: 500 м
- 11-битный идентификатор сообщения
- общее оконечное сопротивление должно быть около 100 Ом.
CAN FD (гибкая скорость передачи данных)
- Скорость: до 15 Мбит / с
- Диапазон 10 м
Рис.3: Схема подключения DB9 CAN BUS Notwork
CAN синхронный или асинхронный?
При передаче данных CAN используется метод побитового арбитража без потерь для разрешения конфликтов. Этот метод арбитража требует, чтобы все узлы в сети CAN были синхронизированы для одновременной выборки каждого бита в сети CAN. Поэтому некоторые называют CAN синхронным. (К сожалению, термин «синхронный» неточен, поскольку данные передаются без тактового сигнала в асинхронном формате). Все узлы связаны друг с другом через двухпроводную шину.Провода представляют собой витую пару с характеристическим сопротивлением 120 Ом (номинальное).
ПРИМЕЧАНИЕ: Шина CAN должна иметь оконечную нагрузку. Согласующие резисторы необходимы для подавления отражений, а также для возврата шины в рецессивное состояние или состояние ожидания.
Рис.4: Топология шины CAN
CAN позволяет использовать несколько устройств (называемых «узлами»), для связи в сети CAN требуются два или более узлов. Сложность узла может варьироваться от простого устройства ввода-вывода до встроенного компьютера или шлюза.Для каждого узла требуется: Центральный процессор: микропроцессор или хост-процессор. Контроллер CAN: часто является неотъемлемой частью микроконтроллера. Приемопередатчик CAN: определяется стандартами ISO 11898-2 / 3 Medium Access Unit [MAU].
Сколько узлов у вас может быть?
В CANopen уникальные адреса доступны для 127 узлов на шине. Однако практический физический предел количества узлов составляет около 110 единиц на шину. В J1939 для шины доступно 253 уникальных адреса.
Рис.5: CAN NODE
В спецификациях CAN используются термины «доминантные» биты и «рецессивные» биты. Доминантный — это логический 0 (передатчик активно управляет напряжением). Рецессивный — это логическая 1 (пассивно возвращается к напряжению с помощью резистора). Состояние ожидания представлено рецессивным уровнем (логическая 1), если один узел передает доминирующий бит и другой узел передает рецессивный бит, тогда возникает коллизия, и доминирующий бит «выигрывает».«Сообщение» — это пакет данных, который несет информацию, подлежащую обмену между узлами. Каждое сообщение в CAN имеет уникальный идентификационный номер.
Следующее видео подробно объясняет, как работает CAN-шина:
При использовании протокола на основе сообщений другие узлы могут быть добавлены без перепрограммирования, поскольку устройства, подключенные к шине, не имеют идентифицирующей информации, такой как адресация узлов. Таким образом, не требуется никаких изменений в программном и аппаратном обеспечении любого из устройств, подключенных к шине.Арбитраж — это процесс согласования между устройствами и принятия решения о том, какое из них может взять на себя управление шиной (Рекомендуемое чтение: https://www.linkedin.com/pulse/bus-arbitration-can-controller-area-network- abdul-rehman-anwer / и https://www.mikroe.com/blog/can-bus).
Чтобы обеспечить достаточное количество переходов для поддержания синхронизации, бит противоположной полярности вставляется после пяти последовательных битов одинаковой полярности. Эта практика называется вставкой битов и необходима из-за кодирования без возврата к нулю (NRZ), используемого с CAN.Заполненные кадры данных уничтожаются получателем.
CAN BUS (СЕТЬ КОНТРОЛЛЕРА)
Общее описание
Шина CAN — это автомобильная шина, разработанная Bosch, позволяющая микроконтроллерам и устройствам обмениваться данными друг с другом в автомобиле без главного компьютера. CAN-шина — это протокол на основе сообщений, разработанный специально для автомобильных приложений, но теперь также используемый в других областях, таких как аэрокосмическая промышленность, промышленная автоматизация и медицинское оборудование.Он стал международным стандартом (ISO 11898) в 1994 году и был специально разработан для быстрого последовательного обмена данными между электронными контроллерами в автомобилях. Он соединяет отдельные системы и датчики в качестве альтернативы обычным многопроволочным ткацким станкам. Он позволяет автомобильным компонентам обмениваться данными по однопроводной или двухпроводной сетевой шине данных со скоростью до 1 Мбит / с. CAN-шина
— это один из пяти протоколов, используемых в стандарте диагностики автомобилей OBD-II.
Внешний вид
Фиг.1 Автомобильная сеть CAN BUS
Принцип работы CAN BUS
В шине CAN для связи используются два выделенных провода. Эти провода называются CAN high и CAN low. Контроллер CAN подключается ко всем компонентам сети через эти два провода. Каждый сетевой узел имеет уникальный идентификатор. Все ЭБУ на шине работают параллельно, поэтому все узлы постоянно видят все данные. Узел отвечает только тогда, когда он обнаруживает свой собственный идентификатор.Отдельные узлы могут быть удалены из сети, не затрагивая другие узлы.
Когда шина CAN находится в режиме ожидания, по обеим линиям подается 2,5 В. Когда передаются биты данных, линия CAN высокого уровня достигает 3,75 В, а низкий уровень CAN падает до 1,25 В, тем самым создавая разность 2,5 В между линиями: каждая из линий CAN связана с другой, а не с землей автомобиля. . Поскольку связь основана на разнице напряжений между двумя линиями шины, шина CAN НЕ чувствительна к индуктивным выбросам, электрическим полям или другим помехам.Это делает CAN-шину надежным выбором для сетевой связи на мобильном оборудовании.
Рис.2
Питание CAN может подаваться через шину CAN. Либо можно организовать питание модулей CAN-шины отдельно. Проводка источника питания может быть либо полностью отделена от линий шины CAN, в результате чего для сети используются два 2-проводных кабеля, либо она может быть интегрирована в тот же кабель, что и линии шины CAN, в результате чего получается один 4-проводный кабель.
Характер связи по шине CAN позволяет всем модулям передавать и получать данные по шине.Любой модуль может передавать данные, которые получают все остальные модули. Очень важно, чтобы полоса пропускания CAN-шины была выделена в первую очередь наиболее критичным для безопасности системам. Узлам обычно назначается один из нескольких уровней приоритета. Например, органы управления двигателем, тормозами и подушками безопасности очень важны с точки зрения безопасности, и командам на активацию этих систем отдается высший приоритет. Это означает, что они будут задействованы раньше, чем менее важные. Аудио и навигационные устройства часто имеют средний приоритет, а активация освещения может иметь самый низкий приоритет.Процесс, известный как арбитраж, определяет приоритет любых сообщений.
Большинство автомобильных сетей CAN работают со скоростью шины 250 кБ / с или 500 кБ / с. В новейших автомобилях используется до 3 отдельных сетей CAN, обычно разной скорости, соединенных между собой шлюзами. Данные одной из трех сетей доступны двум другим сетям. Функции управления двигателем обычно выполняются на высокоскоростной шине со скоростью 500 кбит / с, а системы шасси работают на более медленной шине CAN 250 кбит / с. Другие функции, такие как освещение, спутниковая навигация и зеркала, находятся на отдельной низкоскоростной однопроводной шине LIN (Local Interconnect Network).
Процедура проверки надежности CAN-шины с помощью осциллографа
- Определите контакты CAN-H и CAN-L в доступной точке сети CAN.
Такой точкой обычно является многоходовой разъем ЭБУ. - Установите входы осциллографа на 5 В
- Подключите тестовый провод сигнала одного из каналов осциллографа к проводу CAN-H.
Затем подключите заземляющий провод к заземлению корпуса.
Подключите измерительный провод сигнала одного из других каналов осциллографа к проводу CAN-L. - Включите зажигание.
- Посмотрите на экран осциллографа. Вы должны наблюдать следующие формы сигналов.
Измерение позволяет выполнить следующие проверки:
• Проверить правильность размахов напряжения
• Проверить, присутствует ли сигнал на обоих проводах CAN (CAN использует дифференциальную сигнализацию, поэтому сигнал на одной линии должен быть зеркальным. изображение данных на другой строке).
Фиг.3
Возможные ошибки неисправностей в сети CAN BUS :
• Неправильный размах напряжения.
• Сигнал отсутствует на обоих проводах CAN.
Стандарт ISO 11898 перечисляет несколько видов отказа кабеля CAN-шины:
- CAN_H прерван
- CAN_L прерван
- CAN_H замкнут на напряжение аккумулятора
- CAN_L замкнут на массу
- CAN_H замкнут на массу
- CAN_L замкнут на напряжение аккумулятора
- CAN_L закорочен на провод CAN_H
- CAN_H и CAN_L прерваны в одном месте
- Потеря связи с оконечной сетью
5 преимуществ протокола шины CAN
Что такое протокол шины CAN?Протокол шины CAN (Controller Area Network) быстро набирает популярность среди инженеров, работающих с промышленными встроенными системами высокого уровня.Протокол был разработан Robert Bosch GmbH в 1986 году для дальнейшего развития электронных коммуникаций в автомобильной промышленности.
В начале 1980-х производители транспортных средств впервые начали встраивать в легковые и грузовые автомобили все большее количество электронных устройств, таких как активная подвеска, управление коробкой передач и освещением, центральный замок и АБС. Чтобы эти электронные устройства функционировали согласованно, правильно распределяли время и обменивались данными, их необходимо соединить вместе.
В соответствии с существующими стандартами проводки электронные модули будут взаимодействовать друг с другом с помощью прямых аналоговых сигнальных линий точка-точка. У каждого модуля была прямая линия, соединяющая его с другим модулем, с которым необходимо взаимодействовать, архитектура, которая отнимала много времени и использовала чрезмерное количество проводов.
Протокол CAN устраняет необходимость в чрезмерной проводке, позволяя электронным устройствам обмениваться данными друг с другом по одному мультиплексному проводу, который соединяет каждый узел в сети с главной приборной панелью.Мультиплексная архитектура позволяет объединять и передавать сигналы по всей сети по одному проводу, так что каждый электронный модуль в транспортном средстве своевременно получает данные от датчиков и исполнительных механизмов.
Протокол CAN был стандартизирован Международной организацией по стандартизации (ISO) в 1993 году и с тех пор разделен на два стандарта: ISO 11898-1, который описывает уровень канала передачи данных протокола, и ISO 11898-2, который описывает физический уровень. .Уникальные свойства протокола CAN-шины привели к его растущей популярности и распространению в отраслях промышленности, использующих встроенные сети, таких как здравоохранение, производство и развлечения.
5 преимуществ протокола CAN 1. Низкая стоимостьКогда протокол CAN был впервые создан, его основной целью было обеспечение более быстрой связи между электронными устройствами и модулями в транспортных средствах при одновременном уменьшении количества проводов (и количества меди), необходимых.Это достигается за счет использования мультиплексной проводки, которая позволяет комбинировать аналоговые и цифровые сигналы и передавать их по общей среде.
Чтобы понять, как мультиплексирование снижает стоимость электромонтажа транспортных средств, нам нужно немного больше узнать о том, как работала архитектура разводки до создания протокола шины CAN. Наряду с электронными устройствами или модулями, которые управляют подсистемами транспортного средства, легковые и грузовые автомобили также имеют датчики и исполнительные механизмы, которые собирают данные о работе транспортного средства и передают их модулям, где это необходимо.
Транспортное средство должно иметь датчики для сбора данных о его скорости и ускорении, но для подачи этих данных потребуются выделенные провода для каждого отдельного получателя данных — один провод для связи с системой подушек безопасности, один провод для связи с тормозной системой ABS, другой выделенный провод для управления двигателем и т. д. При использовании протокола CAN один провод соединяет все электронные системы, исполнительные механизмы и датчики в автомобиле в одну цепь, которая обеспечивает высокоскоростную передачу данных между всеми компонентами.
Первым автомобилем, в котором использовалась разводка шины CAN, было купе BMW 850, выпущенное в 1986 году. Внедрение архитектуры шины CAN сократило длину проводки в BMW 850 на 1,25 мили, что, в свою очередь, уменьшило его вес более чем на 100 фунтов. Исходя из текущей стоимости медной проводки, общая экономия на сэкономленных материалах составит почти 600 долларов. Не только это, но и скорость связи была увеличена со скоростью передачи сигнала от 125 кбит / с до 1 Мбит / с.
Низкая стоимость внедрения — одна из основных причин широкого распространения протокола CAN-шины.Меньше проводки означает меньше труда и меньшие материальные затраты для встроенных инженеров.
2. Встроенное обнаружение ошибокОдной из ключевых особенностей протокола шины CAN является то, что он поддерживает централизованное управление электронными устройствами, подключенными к сети. На физическом уровне CAN-шины каждое электронное устройство называется узлом. Узлы могут связываться с другими узлами в сети, и каждому узлу требуется микроконтроллер, контроллер CAN и передатчик CAN.
Хотя каждый узел может отправлять и получать сообщения, не все узлы могут обмениваться данными одновременно. Протокол шины CAN использует метод, называемый побитовым арбитражем без потерь, для разрешения этих ситуаций и определения того, какой узел должен получить «приоритет» для передачи своего сообщения первым.
Обработка ошибок встроена в протокол CAN, при этом каждый узел проверяет наличие ошибок при передаче и поддерживает свой собственный счетчик ошибок. Узлы передают специальное сообщение Error Flag при обнаружении ошибок и уничтожают нарушающий трафик шины, чтобы предотвратить его распространение по системе.Даже узел, который генерирует ошибку, обнаружит свою собственную ошибку при передаче, увеличив счетчик ошибок и, в конечном итоге, приведет к отключению устройства и прекращению участия в сетевом трафике. Таким образом, узлы CAN могут как обнаруживать ошибки, так и предотвращать создание неисправными устройствами бесполезного трафика шины.
3. ПрочностьДолговечность и надежность являются ключевыми аспектами при выборе протокола связи для развертывания в ваших встроенных инженерных проектах.При развертывании продуктов в реальной среде вы захотите выбрать протокол связи, который является самодостаточным, с возможностью продолжать работу в течение длительных периодов времени без внешнего обслуживания или вмешательства.
Эта потребность делает возможности протокола по обнаружению ошибок особенно выгодными, поскольку они позволяют системам выявлять ошибки и восстанавливаться после них самостоятельно, без вмешательства извне. Существует пять механизмов обнаружения ошибок в протоколе CAN:
- Мониторинг бит
- Бит набивка
- Проверка рамы
- Подтверждение
- Циклический контроль избыточности
Линии высокоскоростной шины CAN обладают высокой устойчивостью к электрическим помехам, а контроллеры и приемопередатчики CAN, которые обмениваются данными с электронными устройствами, доступны в промышленных или расширенных диапазонах температур.
Кабель шины CAN обычно уязвим для режимов отказа, перечисленных в стандарте ISO 11898, например:
- CAN_H прерван
- CAN_L прерван
- CAN_H замкнут на напряжение аккумулятора
- CAN_L замкнут на массу
- CAN_H замкнут на массу
- CAN_L замкнут на напряжение аккумулятора
- CAN_L закорочен на провод CAN_H
- CAN_H и CAN_L прерваны в одном месте
- Потеря связи с оконечной сетью
Хотя большинство CAN-трансиверов не выдерживают подобных отказов, некоторые производители электроники создали отказоустойчивые CAN-трансиверы, которые могут обрабатывать все из них, хотя в качестве компромисса они могут иметь ограниченную максимальную скорость.Вместе эти функции расширяют пригодность сетей CAN-Bus для приложений в самых суровых и сложных условиях.
4. СкоростьКогда протокол CAN был впервые определен, он был описан на трех уровнях: уровне объекта, физическом уровне и уровне передачи. Позже, когда была создана спецификация CAN, конкретные определения для физического уровня были исключены. Это дало инженерам гибкость при проектировании систем со средой передачи и напряжением, подходящей для их предполагаемого применения.Позже, чтобы способствовать внедрению устройств и сетей CAN, стандарты были наконец выпущены для физической CAN позже в форме ISO 11898-2.
В настоящее время существует два определенных стандарта физического уровня, два типа протокола CAN, каждый со своими преимуществами и недостатками.
High Speed CAN обеспечивает скорость передачи сигнала от 40 кбит / с до 1 Мбит / с, в зависимости от длины кабеля. Протоколы шины на основе CAN, такие как DeviceNet и CANopen, используют этот физический стандарт для поддержки простых кабельных соединений с высокоскоростной передачей данных.
Низкоскоростная сеть CAN предлагает более низкую скорость передачи сигнала, которая может начинаться с 40 кбит / с, но часто ограничивается 125 кбит / с или около нее. Более низкая скорость передачи сигналов позволяет продолжать связь по шине, даже если происходит сбой проводки. В то время как высокоскоростные сети CAN оканчиваются на обоих концах линии шины резистором на 120 Ом, каждое устройство в низкоскоростной сети CAN имеет собственное завершение. Низкоскоростные сети CAN обладают большей отказоустойчивостью и уязвимы для меньшего количества режимов отказа, но более низкие скорости передачи делают их плохо подходящими для сетей, требующих быстрой и частой связи.
5. ГибкостьЧтобы оценить гибкость протокола CAN-шины в коммуникациях, нам нужно различать протоколы, основанные на адресах и сообщениях. В протоколе связи на основе адресов узлы обмениваются данными напрямую друг с другом, настраивая себя на один и тот же адрес протокола.
Протокол CAN-шины известен как протокол обмена сообщениями. В этом типе протокола узлы на шине не имеют связанной с ними идентифицирующей информации.В результате узлы можно легко добавлять или удалять (процесс, называемый «горячим подключением») без выполнения каких-либо обновлений программного или аппаратного обеспечения в системе.
Эта функция позволяет инженерам легко интегрировать новые электронные устройства в сеть CAN-шины без значительных затрат на программирование и поддерживает модульную систему, которая легко модифицируется в соответствии с вашими спецификациями или требованиями.
Будущее протокола CAN-шины Технология шины CANполучила широкое распространение в различных отраслях промышленности.Благодаря его надежности, гибкости и связанной с этим экономии средств, мы видели сети CAN-шины, реализованные в:
- Грузовые автомобили, автобусы и прочая легковая техника
- Бензиновые и электромобили
- Видеокамеры и системы освещения
- Игровые автоматы
- Оборудование для автоматизации зданий
- Промышленная автоматизация и производственное оборудование
- Медицинские изделия и инструменты
В будущем протокол шины CAN останется предпочтительной сетевой технологией для подключения электронных устройств, требующих частой и простой связи.Ethernet TCP / IP, ведущая альтернатива CAN-шине, по-прежнему не может обеспечить такие же низкие требования к ресурсам, дешевую реализацию, надежность и возможности восстановления после ошибок сетей CAN-шины. Мы продолжим видеть развертывание сетей CAN в устройствах IoT, приложениях промышленной автоматизации, подключенных медицинских устройствах и даже в более требовательных и высокотехнологичных приложениях, таких как спутники и космические корабли.
Как общая фаза работает с протоколом CANПланируете ли вы использовать протокол CAN-шины во встроенном инженерном проекте? Независимо от того, создаете ли вы продукт для автомобильного, военного, промышленного или аэрокосмического сектора, вам необходимо инвестировать в правильные инструменты, которые помогут вам программировать, отслеживать и отлаживать свой продукт.
Total Phase предоставляет инструменты с необходимыми функциями для отправки тестовых сообщений по сети CAN-шины или проведения ненавязчивого мониторинга для исследования сетевого трафика, обнаружения ошибок и их исправления как можно быстрее. С помощью Komodo CAN Solo Interface инженеры по встраиваемым системам могут передавать данные или контролировать шину. Интерфейс Komodo CAN Duo имеет два канала CAN, что позволяет инженерам эмулировать и контролировать данные из двух сетей CAN-шины одновременно.
Хотите узнать больше о том, как наши инструменты работают в вашем конкретном приложении? Заполните наш запрос на отправку демонстрационной формы, и мы покажем вам, насколько легко отладить ваш следующий проект встроенной сети CAN-шины с помощью правильных инструментов Total Phase.
Схема подключения CAN-шины, Учебное пособие
CAN-шина — это обычная цифровая сеть передачи данных, используемая в автомобильных, промышленных, медицинских и научных системах. Шина CAN используется для передачи данных датчиков между частями оборудования. Основные преимущества — высокая устойчивость к шуму, надежность, низкая стоимость, простота подключения и простота использования. Недостатки заключаются в том, что длина пакета данных мала, скорость передачи низкая, а время цикла передачи сообщения может варьироваться.
В этой статье рассматриваются основы подключения шины CAN, показаны простая схема подключения шины CAN и способы подключения кабеля шины CAN. Он охватывает проводку для общей вилки и розетки DB9, часто используемой с испытательным оборудованием CAN-шины. DB9 также известен как 9-контактный D-sub, DE-9 (правильное название), DB-9, последовательный разъем, разъем RS232 или нуль-модемный разъем. Шина CAN используется практически во всех видах моторизованного дорожного транспорта (даже в некоторых мотоциклах и скутерах). В автомобиле шина CAN обычно доступна через порт бортовой диагностики (OBD).Таким образом, покрывается проводка шины CAN OBD. Чтобы перейти прямо к разделу проводки, прокрутите вниз. В противном случае прочтите следующую информацию о CAN-шине.
Что такое CAN-шина?
Что такое CAN? CAN расшифровывается как Controller Area Network. CAN был разработан в 1980-х годах из-за ограничений существующих шин последовательной передачи данных для использования в автомобилях. Вот краткое изложение истории CAN, взятое из статьи История технологии CAN:
- В 1983 году компания Robert Bosch GmbH начала разработку нового серийного автобуса для автомобилей, так как не нашла подходящего серийного автобуса для использования в транспортных средствах.Для поддержки новых электронных функций требовалась последовательная шина.
- Автомобильная последовательная сеть контроллеров (CAN) была анонсирована в 1986 году.
- Intel поставляет первые интегральные схемы CAN в 1987 году.
- Популярность CAN привела к тому, что в 1991 году исходный 11-битный идентификатор сообщения был расширен до 29 бит. Этот новый расширенный CAN работает в той же сети, что и стандартный CAN. 1991 Bosch CAN Specification 2.0 имеет часть A для стандартных сообщений и часть B для расширенных сообщений.Вот почему некоторые публикации ссылаются на спецификацию CAN 2.0B .
- Увеличение объема данных, передаваемых в транспортных средствах (включая время, затрачиваемое на установку новой прошивки для транспортных средств), привело к проблемам с проектированием использования шины CAN. Внедрение CAN с гибкой скоростью передачи данных или просто CAN FD.
CAN FD был представлен в 2012 году для увеличения пропускной способности данных. Для этого размер сегмента данных CAN-пакета был увеличен с максимальных восьми байтов до максимальных 64 байтов.Более того, в CAN FD скорость передачи битов может быть увеличена во время передачи байтов данных пакета до 4 раз, отсюда и название «Гибкая скорость передачи данных». Это увеличивает максимально возможную скорость передачи данных для CAN с 1 мегабит в секунду (1 Мбит / с) до 4 Мбит / с. Скорость передачи данных CAN-шины может быть очень низкой, например 5 килобит в секунду (Кбит / с).
Характеристики шины CAN
По шине CAN доступно много информации, потому что она существует уже давно.Международная организация по стандартизации (ISO) поддерживает спецификации CAN в дорожных транспортных средствах в серии публикаций ISO 11898. Однако, поскольку для доступа к стандартам ISO 11898 требуется плата, оригинальные спецификации Bosch широко использовались.
Спецификация Bosch CAN раньше была указана на литературной веб-странице Bosch CAN, но эта страница исчезла. Кроме того, Bosch предоставил ссылку на свою оригинальную спецификацию CAN FD, однако эта ссылка также исчезла.Пока Bosch не сделает эти спецификации снова доступными, используйте документы ISO 11898, если это возможно, в качестве альтернативы исходные спецификации Bosch CAN временно доступны здесь для исторических целей:
Texas Instruments дает хорошее представление о сети контроллеров. О CAN-шине есть статья в Википедии. У Microchip есть примечание по применению AN228, «Физическое обсуждение CAN», в котором содержится полезная информация о сигналах CAN. Наконец, CAN in Automation (CiA) выпускает спецификацию CiA 303-1 для кабельной разводки соединительных кабелей, которая определяет широко используемый соединитель кабеля CAN-шины DB9 (9-контактный D-Sub) и необходимые выводы.Спецификации CiA также называются CANopen.
Спецификация CiA также предоставляет некоторую информацию о подходящих кабелях, которая не рассматривается в большинстве документов CAN. Таким образом, он предоставляет общие рекомендации по спецификациям кабеля шины CAN, включая информацию о длине кабеля шины CAN. Для базовых стендовых испытаний подходит одна витая пара 22 AWG (часто используется для сигналов датчиков, сигналов, данных или компьютеров). Эти кабели широко доступны у поставщиков электроники, электричества и кабелей.Кабельная система для производственных систем требует проектирования инженером с соответствующим опытом и знаниями.
Те, кому не хватает технических знаний о CAN, могут захотеть взглянуть на статью CSS Electronics и видео «Объяснение шины CAN — простое введение». У них также есть хорошая статья о CAN с гибкой скоростью передачи данных, см. «Объяснение CAN FD — простое введение».
Протокол шины CAN
С точки зрения программного обеспечения данные CAN просты. Физические интерфейсы CAN и оборудование приемопередатчика автоматически обрабатывают протоколы передачи и приема CAN на битовом уровне.Это оставляет программному обеспечению более высокого уровня только обработку идентификатора сообщения, длины данных и байтов данных, а также любых ошибок состояния шины CAN.
Пакеты данных CAN, передаваемые по шине CAN, считываются приложением, которое поставляется с конкретным устройством интерфейса CAN. Устройства подключаются к USB-порту компьютера, через Wi-Fi или Bluetooth. Иногда устройства могут предоставлять данные CAN через интерфейс прикладного программирования (API), что позволяет разрабатывать собственные приложения. В качестве альтернативы, устройство может просто предоставлять последовательный интерфейс к CAN, например, к общедоступным устройствам на базе ELM327.Затем программа терминала или пользовательское приложение, такое как Torque, считывает данные CAN с последовательного порта USB или Bluetooth с помощью устройства интерфейса CAN. Каждый пакет сообщения CAN состоит из:
- Идентификатор 0-2047 (11-битный) стандартный или 0-2 29 -1 (29-битный) расширенный
- Код длины данных (DLC) от 0 до 8 для количества имеющихся байтов данных, для CAN FD значение 8 = 8 байтов, 9 = 12 байтов, 10 = 16 байтов, 11 = 20, 12 = 24, 13 = 32, 14 = 48 и 15 = 64 байта
- Байты данных от 0 до 8 или для CAN FD от 0 до 64 (с использованием длины, определенной DLC)
Кроме того, программное обеспечение устройства CAN обычно предоставляет некоторые средства определения любых состояний ошибки шины CAN.
Пример данных CAN от шины CAN Ford
В следующей таблице примеры пакетов CAN были взяты из зарегистрированных данных с шины CAN Ford. Значения Id и Data отображаются в шестнадцатеричном формате. Время берется из приложения, считывающего пакеты данных CAN (протокол CAN не предоставляет меток времени).
| Время (мс) | Id | Длина | Данные |
|---|---|---|---|
| 5328.009 | 043A | 8 | 1C 21 17 71 17 71 FF FF |
| 5329.008 | 0296 | 8 | 00 00 00 00 00 00 00 60 |
| 5331.029 | 04F2 | 8 | 00 53 6C 00 00 00 00 00 |
| 5338.165 | 0215 | 7 | 00 1C 01 00 00 01 40 |
Для автомобиля байты данных содержат значения, обрабатываемые ЭБУ автомобиля.Значения данных будут означать разные вещи в зависимости от производителя автомобиля, идентификатора CAN пакета и положения значений в пакете. Однако есть некоторые общие значения пакетов для данных о выбросах, известные как идентификаторы параметров или просто идентификаторы PID. Производители расширили систему PID, включив в нее свои собственные значения. Пользовательские значения используются автомобильными техниками при поиске неисправностей с использованием диагностических приборов .
Схема подключения шины CANБольшая часть оборудования для взаимодействия с CAN поставляется с 9-контактным разъемом D-sub (9-контактный штекер D-sub с контактами).Наличие разъема на устройстве CAN противоположно последовательному интерфейсу RS232, который часто поставляется с разъемом на оборудовании. Вот увеличенное изображение некоторого оборудования с интерфейсами CAN с использованием 9-контактных разъемов D-sub:
Вот еще одно устройство интерфейса CAN, называемое PCAN-USB FD. Это устройство CAN-USB предоставляется PEAK-System Technik GmbH и поддерживает стандартные CAN, расширенные CAN и CAN FD и использует штекер DB9:
Распиновка 9-контактного кабеля CAN-шины D-sub определяется CANopn в спецификации CiA 303-1, показанной в этой таблице.
9-контактная шина CAN D-Sub (DB9) Таблица контактов
| Штифт | Описание |
|---|---|
| 1 | Зарезервировано |
| 2 | Доминирующий низкий уровень шины CAN_L (также известный как низкий уровень CAN или CAN-) |
| 3 | Дополнительная CAN земля |
| 4 | Зарезервировано |
| 5 | Дополнительный экран CAN |
| 6 | Дополнительное заземление |
| 7 | Доминантный высокий уровень шины CAN_H (a.к.а. CAN высокий или CAN +) |
| 8 | Зарезервировано |
| 9 | CAN_V +, дополнительный внешний положительный источник питания CAN |
Для базовой сети CAN это упрощается до:
| Штифт | Описание |
|---|---|
| 2 | Доминирующий низкий уровень шины CAN_L (также известный как низкий уровень CAN или CAN-) |
| 7 | Доминантный высокий уровень шины CAN_H (также известный кака. CAN высокий или CAN +) |
Следовательно, для устройств, соответствующих спецификации CANopen, основной кабель CAN-шины представляет собой отрезок кабеля одиночной витой пары с разъемами DB9 (9-контактные розетки D-sub с отверстиями):
Самая простая проводка — контакты 2 и 7 на разъемах DB9 для прямого подключения. Помните, что нумерация выводов меняется при просмотре разъема спереди или сзади. Вид сзади будет использоваться при прокладке кабелей, а вид спереди — при поиске сигналов:
Для более отказоустойчивой сети можно подключить сигналы заземления CAN.Когда используется заземление CAN и поврежден один из проводов CAN high или CAN low, сеть может продолжать работать. См. Спецификации по использованию линий заземления CAN.
Конец проводки CAN-шины
Диаграмма в начале статьи была взята из образа CAN-шины Wikimedia Commons. На нем показана схема шины CAN. На каждом конце шины есть резистор. Шина CAN должна иметь согласующий резистор на каждом конце. Согласующий резистор имеет сопротивление около 120 Ом. Резистор поглощает энергию сигнала CAN, так что он не отражается от конца кабеля обратно по сети, вызывая помехи.При использовании кабеля с вилкой и розеткой DB9 можно подключить адаптер DB9 со встроенным резистором на 120 Ом:
Это оконечное устройство CAN на 120 Ом подключается к последнему устройству в сети CAN, затем кабель CAN DB9 подключается к оконечному устройству DB9.
Многие устройства будут иметь встроенную поддержку оконечной нагрузки CAN. Хотя это может означать, что устройство необходимо открыть, чтобы разрешить внутреннее завершение CAN. Оконечная нагрузка CAN в устройствах может поддерживаться перемычкой, переключателем, паяными площадками или настраиваться с помощью программного обеспечения (см. Инструкции производителя).
При прокладке кабелей оконечные резисторы на 120 Ом могут быть припаяны к задней части разъемов DB9. Эта диаграмма иллюстрирует идею:
Вот пример оконечного резистора на 120 Ом, припаянного к разъему DB9 с проводкой CAN, расположенной в корпусе DB9.
При стендовых испытаниях коротких цепей может быть достаточно только одного согласующего резистора. Однако для лучшей производительности шина CAN должна иметь оконечные устройства на обоих концах, особенно для более высоких скоростей передачи данных.
Терминатор на 120 Ом может быть улучшен для обеспечения дополнительной помехоустойчивости, см. Технические характеристики для получения информации о раздельном согласовании (с использованием двух резисторов на 60 Ом и соединительного конденсатора, подключенного между ними и заземлением, например, 4,7 нФ для 1 Мбит / с).
Сеть нескольких устройств
Ограничения по длине кабеля для подключения к шине CAN см. В технических характеристиках. Шина CAN представляет собой многоточечную сеть без ведущего устройства, поэтому все узлы CAN просто подключаются к проводам высокого и низкого уровня CAN:
Для стендовых испытаний это может быть выполнено с использованием изготовленных на заказ кабелей, гирляндного подключения прямых кабелей разветвителя DB9 или ленточных кабелей, оснащенных 9-контактными разъемами смещения изоляции D-Sub (IDC).
Если на конце кабеля находится неправильный штекер или розетка, можно использовать устройство смены пола DB9, чтобы преобразовать его в правильное соединение. Они доступны для преобразования вилок (мужские) в розетки (женские) и розетки в вилки. Они полезны для подключения двух устройств CAN для выполнения теста петли (отправка сообщения с компьютера на одном устройстве и получение его обратно на другом устройстве):
Кабель автомобильной шины CAN
Шина CAN распространена в автомобилях.Как узнать, есть ли в моей машине CAN-шина? Шина CAN присутствует почти во всех автомобилях, которые производятся из-за требования к властям доступа к данным о выбросах двигателя (загрязнении выхлопных газов) из систем управления двигателем. Данные о выбросах считываются по шине CAN. Это требование вступило в силу в Америке с конца 1990-х годов, в Европе и Японии с начала 2000-х годов и в Австралии с конца 2000-х годов. Автомобили созданы для мирового рынка, поэтому все автомобили, как правило, имеют шину CAN. Доступ к CAN-шине осуществляется через порт OBD:
.Использование выводов ODB
| Штифт | Описание |
|---|---|
| 1 | Определено производителем, e.грамм. VW / Audi / BMW игн. вкл., низкая скорость GMLAN |
| 2 | SAE J1850 ШИМ автобус + |
| 3 | Производитель определен, например Ford средней или высокой скорости CAN- (низкий), Chrysler CCD bus + |
| 4 | Шасси Земля |
| 5 | Сигнальная земля |
| 6 | CAN + (высокий), ISO 15765-4, SAE J2284 |
| 7 | K-Line (ISO 9141-2, ISO 14230-4) |
| 8 | Определено производителем, e.грамм. BMW второй K-Line |
| 9 | Производитель определен, например Обороты двигателя BMW |
| 10 | SAE J1850 ШИМ-шина- |
| 11 | Производитель определен, например Ford средней или высокой скорости CAN + (высокий), Chrysler CCD bus- |
| 12 | Определено производителем |
| 13 | Определено производителем, например, программирование Ford PCM |
| 14 | CAN- (низкий), ISO 15765-4, SAE J2284 |
| 15 | L-образный (ISO 9141-2, ISO 14230-4) |
| 16 | Автомобильный аккумулятор + ve (под напряжением 12 В или 24 В) |
Подключение ODB CAN к DB9
При подключении порта OBD к устройству CAN DB9 можно приобрести или изготовить кабель.Для изготовления кабеля требуется штекер OBD (вилка) и 9-контактное гнездо D-sub (розетка). При покупке кабеля OBD-CAN убедитесь, что разъем DB9 соответствует вилке устройства CAN. Некоторые кабели от OBD до DB9 не соответствуют стандарту CANopen (например, контакты 2 и 7 на разъеме DB9). Также имейте в виду, что разъем OBD на автомобиле открывает 12-вольтовую электрическую систему автомобиля. Это означает, что контакты питания на розетке OBD могут иметь диапазон напряжения от 10 до 18 вольт (выше на грузовиках) и обеспечивать опасно высокий ток.Поэтому необходимо принять меры против поражения электрическим током.
CAN-шина, интерфейсы Arduino
Для создания сенсорной сети, подключения к шине CAN или просмотра сигналов CAN от транспортных средств в Интернете доступно множество проектов. Многие микроконтроллеры поддерживают протокол CAN. Они подключаются к CAN с помощью микросхемы приемопередатчика CAN. Многие популярные одноплатные компьютеры (SBC), такие как Arduino, Raspberry Pi и Texas Instruments Launchpad, могут подключаться к CAN через надстройки.Интерфейсы CAN Arduino популярны, например, Seeed Studio CAN-BUS Shield и SparkFun CAN-BUS Shield, а также различные совместимые устройства. Для одноплатного решения Arduino раньше была доступна плата Leonardo CAN BUS.
Примечание. Некоторые дополнительные платы с разъемом DB9 требуют правильной настройки для совместимости с CANopen (контакты 2 и 7 на разъеме DB9).
Оборудование для тестирования CAN-шины
Хотя интерфейсы Arduino обеспечивают надежный метод подключения и построения CAN-шины, иногда требуется профессионально поддерживаемое оборудование.Особенно, если при отладке системы не следует отбрасывать пакеты данных CAN. Ведущие производители оборудования для тестирования CAN:
См. Также
17 августа 2020 г. — TC спросил: Какова максимальная или минимальная длина каждого узла на шине?
Tek Eye — Максимальная длина кабеля между двумя конечными узлами на шине CAN зависит от используемой скорости передачи данных шины (т. Е. Скорости передачи данных). Скорость передачи сигналов в битах в секунду (бит / с) определяет максимальную длину кабеля для шины CAN.Низкая скорость передачи данных CAN-шины, например 10 Кбит / с, позволит шине работать на большом расстоянии 6700 метров между двумя концами шины. По мере увеличения скорости передачи данных максимальная длина шины быстро уменьшается. При обычных скоростях передачи данных CAN-шины автомобиля максимальная длина шины составляет:
.- 125 Кбит / с — 530 метров
- 500 Кбит / с — 130 метров
- 1000 Кбит / с (1 Мбит / с) — 49 метров
Длина шлейфов должна быть короткой, 30 см для CAN-шины 1 Мбит / с, то есть прокладывать кабели CAN-шины к каждому узлу, а не использовать длинные кабели для узлов на шлейфах.
15 сентября 2020 года — andreaspenda92 спросил: Привет, вы проводите онлайн-уроки по CAN-шине?
Tek Eye — Здравствуйте, онлайн классы CAN-шины в настоящее время не предоставляются.