CAN-LIN Мастер — CAN — модули — Каталог — Научно-производственное объединение СтарЛайн
Модуль CAN+LIN позволяет упростить установку охранных комплексов StarLine на автомобили, оснащенные цифровыми шинами CAN и LIN. Интерфейсы CAN и LIN обеспечивает наиболее полный функционал на автомобилях Lada Granta, Lada Kalina, Lada Priora.
Модуль CAN+LIN предназначен для установки в сигнализаци четвертого поколения: StarLine D94, StarLine D64, StarLine B94, StarLine E90 и т.д., включая StarLine A93 и StarLine A63.
Для удобной настройки и обновления программного обеспечения модуля CAN+LIN скачайте приложение «Программатор StarLine CAN Телематика» с сайта can.starline.ru.
Поддерживаемые функции:
Чтение информации о состоянии концевиков дверей, капота и багажника, педали тормоза и стояночного тормоза, зажигания, работе двигателя.
Управление центральным замком и штатной сигнализацией, аварийной сигнализацией, функцией «комфорт», отпиранием багажника, имитацией открывания двери водителя и запуском двигателя.
Функции SUPER SLAVE и Иммобилайзер с валидатором
Список поддерживаемых моделей автоомобилей и функций для каждого автомобиля смотрите на сайте can.starline.ru.
Инструкция по программированию
Технические характеристики
| Напряжение питания, В | 9…18 | ||
| Максимальный ток потребления в рабочем режиме, не более, мА | 70 | ||
| Максимальный ток потребления в дежурном режиме, не более, мА | 0,5 | ||
| Диапазон рабочих температур, °С | -50…+80 | ||
| Максимальная относительная влажность воздуха, % | 95 |
Спасибо за Ваш выбор. Пожалуйста, заполните форму. Мы обязательно свяжемся с Вами в течение 24 часов.
Пожалуйста, заполните форму. Мы обязательно свяжемся с Вами в течение 24 часов.
Поля, отмеченные звёздочкой, обязательны для заполнения
StarLine A63 CAN+LIN — StarLine без автозапуска в Мурманске
Описание товара
От младшей модели отличается предустановленным CAN+LIN-модулем, что обеспечивает совместимость устройства с новыми автомобилями и наличие дополнительного функционала, например, режима Super Slave, Flex, PIN-код и др.
Сохранился и стандартный функционал, в числе которого традиционный диалоговый код, надежный трансивер, возможность дооснащения дополнительным оборудованием, надежный и чувствительный акселерометр и другой функционал, более подробный перечень которого представлен далее.
ДИАЛОГОВАЯ ЗАЩИТА 128-битные индивидуальные ключи шифрования обеспечат безопасную связь пульта управления и сигнализации StarLine, не давая возможности злоумышленнику перехватить сигнал с помощью кодграббера.
ЗАЩИТА ОТ РАДИОПОМЕХ Уверенную связь пульта управления и автомобиля обеспечит надежный 128-канальный узкополосный трансивер.
SUPER SLAVE Управление системой охраны автомобиля возможно осуществлять со штатного пульта управления. Опция доступна при интеграции 2CAN или CAN+LIN интерфейса.
РАСШИРЕННЫЙ ДИАПАЗОН ТЕМПЕРАТУР Сигнализации StarLine уверенно работают в самых тяжелых погодных условиях. Высококачественные комплектующие обеспечат бесперебойную работу в диапазоне от -50 до +85 °С.
РЕКОРДНАЯ ЭНЕРГОЭКОНОМИЧНОСТЬ Благодаря запатентованным технологиям режим эноргопотребления StarLine стал еще более эффективным – система работает до 60 дней без подзарядки аккумулятора.
АВТОРИЗАЦИЯ ПО PIN-КОДУ Авторизация по индивидуальному PIN-коду позволит надежно защитить Ваш автомобиль от угона. Доступ в салон открыт только после ввода пароля с использованием штатных кнопок автомобиля.
3D ДАТЧИК УДАРА И НАКЛОНА Интегрированный цифровой датчик удара и наклона регистрирует любые попытки поддомкрачивания, эвакуации и любые другие несканкционированные действия. Присутствует дистанционная настройка.
ТЕЛЕМАТИКА (опция) Возможность установки дополнительных GSM-GPRS, GPS-ГЛОНАСС телематических интерфейсов обеспечит как дополнительный функционал и удобство использования, так и повысит уровень безопасности.
УПРАВЛЕНИЕ С ТЕЛЕФОНА (опция)
БЕСПЛАТНОЕ ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ (опция) У Вас будет возможность с точностью до нескольких метров определить местоположение автомобиля. опция доступна при подключении StarLine GPS-ГЛОНАСС-Мастер. Мониторинг осуществляется через ресурс www. starline-online.ru.
starline-online.ru.
ВСТРОЕННЫЙ 2CAN интерфейс (опция) Интеграция 2CAN интерфейса обеспечивает быструю, удобную и безопасную установку охранного оборудования StarLine на современные автомобили, оснащенные несколькими цифровыми шинами CAN
CAN+LIN позволит провести быструю и безопасную установку охранных систем StarLine на современные автомобили, оборудованные CAN/LIN-шинами. на современные автомобили, оснащенные шинами CAN, LIN, такие, как: Lada Kalina, Lada Kalina II, Lada Priora и Lada Granta
ГИБКИЕ СЕРВИСНЫЕ КАНАЛЫ Индивидуальные параметры управления световой аварийной сигнализацией, системой обогрева зеркал и стекол, автоматическая установка оптимального положения сидения и руля и др.
УМНЫЙ БЕСКЛЮЧЕВОЙ ОБХОД (опция) Технология StarLine iKey реализует бесключевой обход штатного иммобилайзера в автомобилях, подключение сигнализации в которых осуществляется через CAN+LIN-интерфейс с версией программного обеспечения StarLine CAN Телематика 3. 6 и выше.
6 и выше.
УМНАЯ БЛОКИРОВКА Поездка возможна только после авторизации владельца по уникальной метке или мобильному телефону* на основе Bluetooth Smart технологии.
КОНТРОЛЬ КАНАЛА СВЯЗИ обеспечит гарантию постоянной связи автомобиля с владельцем. При выходе из зоны действия приемопередатчика Вы получите уведомление о потере сигнала.
Дополнительная информация о StarLine A63 CAN+LIN
Противоугонные функции:
- Возможность подключения дополнительного устройства – беспроводного реле блокировки двигателя StarLine R2;
- Совместимость с беспроводным реле блокировки двигателя StarLine R3;
- Основной блок позволяет осуществить интеграцию GSM/GPS модуля от StarLine используя только один разъем.
Команды в режимах охраны и тревоги:
- Устройство поддерживает управление дополнительными замками блокировки дверей;
- Безопасная блокировка двигателя;
- Контроль замка капота;
- Деактивация световой сигнализации, при подключении к аварийной сигнализации.


Функции комфорта:
- Дистанционный контроль систем подогрева, например, Webasto;
- Автонастройка сидений автомобиля по заранее записанной программе;
- Управление положением рулевой колонки.
При включении режима охраны:
- Управление системой складывания зеркал;
- Закрытие люка производится автоматически;
- Функция «проводить водителя» (световая дорожка) после включения режима охраны.
На базе системы StarLine A63 CAN/LIN можно построить надежный охранный комплекс, включающий в себя:
Технические характеристики:
| • Частотность сигналов управления автосигнализацией в диапазоне | от 433,05 до 434,79 МГц | • Число радиоканалов для управления устройством | 128 | • Максимальная дальность связи основного пульта при передаче команд управления | 800 м | • Максимальная дальность связи основного пульта при приеме команд управления | 2000 м | • Максимальная дальность связи дополнительного брелка | 15 м | • Тип датчика удара/наклона | интегральный трехосевой акселерометр | • Рабочий диапазон температур | от -50 до +850С | • Напряжение питания постоянного тока | 9 — 18 В | • Ток, потребляемый сигнализацией в режиме охраны | не более 26 мА |
Инструкция по установке ПО блока сигнализации L5 и выше
Инструкция по эксплуатации ПО блока сигнализации L5 и выше
Задать вопрос или записаться на установку автосигнализации Вы можете по телефону +7 (921) 033-33-96 или через форму обратной связи.

Автосигнализациия StarLine A93 CAN+LIN. Описание, технические характеристики, фотографии.
Новинка 2014 года, приходящая на смену предшественника StarLine A91, новая система StarLine A93 CAN+LIN произведена на платформе 4-го поколения и отличается от своих старших моделей (А94, B94 и D94) наличием встроенных силовых реле для управления центральным замком и световыми сигналами.
Сигнализация StarLine A93 CAN+LIN снабжена новым эргономичным брелоком. Брелок с ЖК-дисплеем для двухсторонней связи имеет инновационную ударопрочную конструкцию, эргономичный дизайн, внутреннюю защищенную антенну и приятную белую подсветку дисплея.
Наличие универсального модуля CAN+LIN упрощает установку и открывает новые возможности для охранного комплекса в автомобилях, которые требуют подключения к цифровым шинам CAN и LIN. Список моделей постоянно пополняется.
Режим SUPER SLAVE
Управлять охраной автомобиля можно с помощью штатного брелка. В роли метки выступает дополнительный миниатюрный брелок StarLine. Штатная охрана усиливается за счет надежной диалоговой авторизации.
В роли метки выступает дополнительный миниатюрный брелок StarLine. Штатная охрана усиливается за счет надежной диалоговой авторизации.
3D-датчик удара и наклона
Цифровой датчик с дистанционной настройкой регистрирует поддомкрачивание и эвакуацию автомобиля.
Сервисные возможности
Вы можете настроить функцию «Комфорт» (когда при постановке на охрану поднимаются стекла) и другие полезные функции.
Дополнительная защита
Подключив кодовое реле R3 и замок капота (опции), вы защитите подкапотное пространство и обеспечите блокировку двигателя, если машиной заинтересуется злоумышленник.
Особенности, функционал и опции:
SUPER SLAVE Возможность управления охраной автомобиля штатным брелком. Надежную защиту гарантируют 3 рубежа охраны: диалоговая идентификация, штатная система, валидатор-иммобилайзер
ДИАЛОГОВАЯ ЗАЩИТА Диалоговый код управления StarLine A93 CAN+LIN с индивидуальными ключами шифрования 128 бит гарантирует надежную защиту от всех известных кодграбберов
ЗАЩИТА ОТ ПОМЕХ Охранный комплекс уверенно работает в условиях экстремальных городских радиопомех, благодаря уникальному 512-канальному узкополосному трансиверу
3D ДАТЧИК УДАРА И НАКЛОНА Интегрированный 3-х осевой датчик наклона и удара с дистанционной настройкой. Регистрирует поддомкрачивание и эвакуацию автомобиля
Регистрирует поддомкрачивание и эвакуацию автомобиля
РАСШИРЕННЫЙ ДИАПАЗОН ТЕМПЕРАТУР Охранный комплекс уверенно работает в суровых климатических условиях при температуре от -50 до +85 °С
АВТОЗАПУСК Интеллектуальный автозапуск позволяет осуществлять дистанционный и автоматический запуск двигателя по температуре или в заданное время
РЕКОРДНАЯ ЭНЕРГОЭКОНОМИЧНОСТЬ Использованию запатентованных прогрессивных технологий и программных решений гарантирует сохранность достаточного заряда аккумулятора до 60 дней в режиме охраны
ВСТРОЕННЫЙ CAN LIN ИНТЕРФЕЙС Обеспечивает быструю, удобную и безопасную установку охранных систем StarLine на современные автомобили, оснащенные шинами CAN LIN
КОНТРОЛЬ КАНАЛА СВЯЗИ Автоматический контроль канала связи обеспечивает проверку нахождения брелка в зоне действия приемопередатчика сигнализации
УДАРОПРОЧНЫЙ БРЕЛОК Брелок имеет инновационную ударопрочную конструкцию, эргономичный дизайн и внутреннюю защищенную антенну
«ГИБКИЕ» СЕРВИСНЫЕ КАНАЛЫ Программируемые параметры управления аварийной световой сигнализацией, складыванием зеркал, настройкой сидения под владельца и др.
Опции:
ТЕЛЕМАТИКА Возможность установки опционального GSM-GPRS, GPS-GLONASS телематического модуля позволяет определять координаты автомобиля, управлять дистанционно
УПРАВЛЕНИЕ С ТЕЛЕФОНА Встроенный GSM-модуль позволяет управлять охранными и сервисными функциями, а также получать оповещения о статусе охраны на Ваш мобильный телефон
2CAN ИНТЕРФЕЙС Обеспечивает быструю, удобную и безопасную установку охранных систем StarLine на современные автомобили, оснащенные шинами CAN
БЕСПРОВОДНАЯ БЛОКИРОВКА ДВИГАТЕЛЯ беспроводное подключение и компактные габариты позволяют разместить реле в самых труднодоступных местах автомобиля
StarLine CAN-LIN Мастер — упрощение установки на Lada Priora, Kalina, Granta
Описание
StarLine CAN-LIN Мастер позволяет упростить установку охранных систем от StarLine на современных автомобилей. От StarLine 2CAN отличается более полной поддержкой отечественных авто.
От StarLine 2CAN отличается более полной поддержкой отечественных авто.
Идеально для отечественных авто. Модуль обеспечивает наиболее полную реализацию функциональных возможностей автомобилей Lada (Лада): Приора, Гранта, Калина.
Также в списке есть все новые (конец 2014 года) модели BMW, Chevrolet, Audi, Ford, Hyundai, Toyota и прочие.
Вы можете скачать и ознакомиться с актуальным списком совместимых авто (PDF, 0,5 Мб).
Совместимые сигнализации
Характеристики CAN-LIN от StarLine
- LIN-порт актуален для отечественных автомобилей марки Lada (Лада);
- Упрощение установки сигнализаций;
- Совместимость сигнализациями StarLine;
- С ним доступны функции Super Slave (управление со штатного брелока) и иммобилайзер с подтверждением;
- Контроль состояния дверей, капота, багажника, тормозов, зажигания и двигателя;
- Управление центральным замком, сигнализацией, отпиранием багажника и прочим;
- Поддержка 99% автомобилей 2010-2015 годов выпуска.

Состав комплекта
- Модуль StarLine CAN-LIN;
- Упаковка.
Документация
Общие свойства
- Минимальная рабочая температура, °C
- Максимальная рабочая температура, °C
Технические характеристики
- Потребление тока в активном режиме, мА
- Потребление тока в пассивном режиме (мА)
- Допустимая влажность, %
CAN / LIN
Интерфейсы CAN
Разработанный изначально для автомобильной промышленности, интерфейс CAN обеспечивает недорогое, надежное решение применяемое в настоящее время в самых разных областях электроники. Microchip предлагает широкий выбор CAN интерфейсов. Они отличаются скоростью передачи данных, напряжением питания и максимальным напряжением на шине. Доступны интерфейсы с поддержкой стандартов CAN 2.0B, CAN FD, максимальная скорость передачи данных достигает 8 Мб/с. Предлагаются
Microchip предлагает широкий выбор CAN интерфейсов. Они отличаются скоростью передачи данных, напряжением питания и максимальным напряжением на шине. Доступны интерфейсы с поддержкой стандартов CAN 2.0B, CAN FD, максимальная скорость передачи данных достигает 8 Мб/с. Предлагаются
— CAN/CAN FD трансиверы
— CAN контроллеры
— CAN контроллеры со встроенным трансивером.
Интерфейсы LIN
LIN интерфейсы используются для объединения сетевых узлов, работающих с малыми скоростями передачи данных на коротких расстояниях. В сети LIN используется однополярная шина, отсутствуют жесткие требования к синхронизации узлов, система работает в широком диапазоне напряжений. Это, в конечном итоге, обуславливает простоту ее разработки и отладки. Microchip предлагает широкий спектр решений в данной области:
— LIN трансиверы, в том числе со встроенным линейным регулятором
— LIN трансиверы со встроенным линейным регулятором, силовым драйвером и ключом
— LIN трансиверы со встроенным линейным регулятором и сторожевым таймером
— подсистему, включающую LIN трансивер и микроконтроллер.
Производители
Новости
Контакты
|
Ведущий инженер отдела дистрибуции |
Александр Казак-Казакевич | kaz@efo. ru ru |
DM330018, Макетная плата, A — mini-B USB, CAN, LIN и SENT, PKOB
Описание
Макетные Платы, Инструменты Оценки\Комплекты Разработчика Устройств Взаимодействия / Связи
The DM330018 is a (dsPIC33EV 5V CAN-LIN) Starter Kit features the dsPIC33EV256GM106 Digital Signal Controller (DSC). The Starter Kit contains serial data ports for CAN, LIN and SENT, a self-contained USB programming/debug interface and an expansion footprint for flexibility in application hardware development. This board allows users to explore three popular automotive and industrial serial data formats (CAN, LIN and SENT). The PICkit On-Board (PKOB) USB programmer and debugger allows simple programming without the need for an additional hardware interface. No other external tools are required to program the device.
• Features dsPIC33EV256GM106 microcontroller
• PICkit On-Board (PKOB) USB programmer and debugger
• CAN, LIN and SENT Interfaces
• USB powered
Технические параметры
| Производитель Чипа | Microchip |
| Номер Ядра Чипа | dsPIC33EV256GM106 |
| Подтип Приложения | CAN и LIN Интерфейс |
| Тип Приложения Набора | Интерфейс |
| Категория продукта | Макетные платы и комплекты — PIC / DSPIC |
| Подкатегория | Development Tools |
| Продукт | Starter Kits |
| Рабочее напряжение питания | 5 V |
| Размер фабричной упаковки | 1 |
| Средство предназначено для оценки | dsPIC33EV256GM106 |
| Тип продукта | Development Boards Kits — PIC / DSPIC |
| Торговая марка | Microchip Technology |
| Ядро | dsPIC33 |
| Вес, г | 200 |
Дополнительная информация
Datasheet DM330018
Datasheet DM330018
Обзор StarLine A93 CAN LIN —
Обзор StarLine A93 CAN LIN
В сентябре 2014 года, в нашем интернет- магазине StarLine174 на прилавках появится новая охранная система StarLine A93 CAN+LIN. Автосигнализация StarLine A93 спроектирована для охраны отечественных автомобилей LADA Гранта, LADA Калина, LADA Калина 2, LADA Приора, требующих пoдключение к цифрoвым шинам CAN и LIN.
Автосигнализация StarLine A93 спроектирована для охраны отечественных автомобилей LADA Гранта, LADA Калина, LADA Калина 2, LADA Приора, требующих пoдключение к цифрoвым шинам CAN и LIN.
StarLine A93 CAN+LIN ― это охранный комплекс по доступной цене, встроенным модулем CAN+LIN, возможнoстью рабoты в режиме SUPER SLAVE, умным запуском двигателя, ударопрочным корпусом брелока, повышенной защитой от городских помех и уникальным кодом шифрования.
Сигнализация спроектирована на основе гибкoй архитектуры StarLine, которая зарекомендовала себя лидером на рынке автосигнализаций. Управление охраной с телефона, качественный мониторинг за транспортом. Просто установите мoдуль GSM, GPS+ГЛOНАСС ― и ваш автомoбиль как на ладoни!
Мoдуль CAN+LIN
Наличие встроенного мoдуля CAN+LIN упрoщает установку и открывает нoвые возможнoсти для охраннoго комплекса в автомoбилях, кoторые используют подключение к цифрoвым шинам CAN и LIN. Таблица моделей постоянно обновляется, подробности уточняйте у наших специалистов.
Pежим SUPER SLAVE
Теперь управление охранной сигнализацией можно oсуществлять с пoмощью штатного брелока автомобиля. В качестве метки выступает миниатюрный доп.брелок- метка. Штатная охрана усиливает свои свойства с помощью диалоговой инициализации.
Эргономичный брелок
Брелок с ЖК экраном и обратной связью имеет новый противоударный корпус, обновленный дизайн, встроенную защищенную антенну и эстетично приятную, холодного цвета, пoдсветку дисплея.
3D-датчик удара и наклона
Цифровoй датчик наклона с настройкой от брелока, контролирует состояние в 3х плоскостях, что предотвращяет поддамкрачивание и эвакуацию авто.
Сервисные возможности
При наличии в комплектации вашего авто доводчиков стекол, вы можете реализовать функцию «Кoмфорт» и др. пoлезные функции.
Дополнительная защита
Установив дополнительно кодовое беспроводное реле R3 и замки капота, вы защитите пoдкапотное прoстранство и oбеспечите блокировку двигателя, если вашей машинoй заинтересуeтся злoумышленник.
StarLine A93 CAN+LIN — это современная и доступная защита Вашегo любимогo автoмобиля!
* Рекoмендованная цена вас приятнo удивит
СетиLIN и CAN расширят возможности распределенного автомобильного интеллекта
Загрузите эту статью в формате PDF.
Дисплеидля электронной бумаги существуют уже некоторое время, они стали популярными среди читателей электронных книг, таких как Amazon Kindle, Barnes & Noble Nook и различных моделей Kobo. Дисплеи с электронной бумагой также все чаще появляются в других устройствах, включая бирки на полках магазинов, транспортные этикетки, часы, вывески и даже чехлы для смартфонов.
Но, несмотря на то, что многие люди видят или используют эти дисплеи ежедневно, вокруг этой технологии вращается множество мифов и заблуждений.Здесь мы рассмотрим 11 из них, чтобы помочь вам понять, почему электронная бумага становится таким популярным выбором для дизайнеров продуктов, которые хотят включать дисплеи, но имеют очень ограниченный бюджет на электроэнергию.
1. Дисплей с электронной бумагой потребляет немного меньше энергии, чем ЖК-экран TFT того же размера.
Хотя это утверждение может быть верным в определенных случаях, если электронная бумага используется с ее сильными сторонами, то есть для дисплеев, которые обновляются относительно нечасто, она будет потреблять значительно меньше энергии, чем TFT LCD того же размера.Это потому, что он потребляет энергию только тогда, когда вы меняете то, что отображается на дисплее. Когда изображение становится видимым, электронной бумаге не требуется питания, чтобы удерживать его там.
Чтобы понять, насколько велико различие, о котором мы говорим, представьте себе двухдюймовый экран, который должен постоянно отображать информацию, и обновлять эту информацию шесть раз в день. ЖК-экран TFT должен обновляться примерно 50 раз в секунду (или 4 320 000 раз в день) независимо от того, остается ли отображаемое изображение прежним или меняется.При 30 мА × 0,02 секунды на обновление × 4 320 000 обновлений в день, это дает ежедневное потребление энергии 2592 000 мА или 720 мАч.
Напротив, дисплей с электронной бумагой будет использовать около 3 мА в течение 2 секунд каждый раз, когда он обновляет свое содержимое, что дает общее потребление 36 мА или 0,012 мАч в день. Другими словами, в этом типичном случае использования электронной бумаги дисплей потребляет всего 0,008% энергии, которая потребовалась бы TFT ЖК-дисплею того же размера в день.
2. Несмотря на то, что электронная бумага потребляет относительно мало энергии, устройства с дисплеями с электронной бумагой обычно требуют замены батареи каждые 12 месяцев.
Если бы это было правдой, это создало бы значительную логистическую головную боль для любого, кто использует большое количество комплектов электронной бумаги с батарейным питанием, таких как бирки или этикетки. К счастью, в большинстве случаев ежегодная замена батареи маловероятна.
Конечно, сколько именно заряда батареи на бирке или этикетке прослужит, зависит от ряда факторов: типа используемой батареи, того, как часто обновляется дисплей, как эта информация отправляется на бирку или этикетку и какие другие компоненты она содержит.
Но, чтобы проиллюстрировать, насколько малая доля энергии будет использоваться дисплеем электронной бумаги в такой бирке или этикетке, возьмем показатель ежедневного использования из приведенного выше примера. При 0,012 мАч в день годовое потребление составит около 3,65 мАч. Если учесть, что батарейка типа «таблетка» CR2032, популярный выбор для таких приложений, имеет заявленную емкость около 220 мАч, становится ясно, что за 12 месяцев дисплей не сможет добиться в этом значительных успехов.
Даже если принять во внимание другие компоненты, а также небольшую утечку из батареи, большинство этикеток на полках, представленных сегодня на рынке, рассчитаны на срок службы до пяти лет без замены батареи.
3. Когда батарея разряжается, вы теряете то, что отображается на экране электронной бумаги.
В отличие от традиционных ЖК-дисплеев TFT, которым для отображения чего-либо требуется постоянный источник питания, когда на экране электронной бумаги отображается изображение, оно остается на нем и не потребляет энергию. Другими словами, даже если вы удалите источник питания, все, что отображается на дисплее, останется видимым.
Другими словами, даже если вы удалите источник питания, все, что отображается на дисплее, останется видимым.
Это потому, что в электронной бумаге используется «бистабильная технология». «Пиксели» электронной бумаги — это, по сути, крошечные капсулы, содержащие отрицательно заряженные черные частицы и положительно заряженные белые.Применяя положительный заряд к верхней части капсулы и отрицательный к нижней части, вы привлекаете черные частицы в поле зрения и убираете с поля зрения белые, тем самым создавая темные области на экране. И наоборот, отрицательный заряд вверху и положительный внизу делает белые частицы видимыми для глаза, создавая чистую область. Важно отметить, что как только частицы заняли свое положение, они останутся там до тех пор, пока не будет применен противоположный заряд, чтобы переместить их.
4. Многие существующие сканеры штрих-кода или QR-кода не могут прочитать дисплей электронной бумаги.
Когда вы отображаете штрих-код на ЖК-дисплее, не все сканеры могут его прочитать. Спросите любого, кто пытался отсканировать штрих-код ваучера или карты лояльности, отображаемый на экране смартфона, в системе самообслуживания — часто это не работает.
Спросите любого, кто пытался отсканировать штрих-код ваучера или карты лояльности, отображаемый на экране смартфона, в системе самообслуживания — часто это не работает.
В результате существует неправильное представление о том, что штрих-коды или QR-коды, отображаемые на дисплеях электронной бумаги, дадут тот же результат. Фактически, способ создания изображения с помощью технологии электронной бумаги принципиально отличается от ЖК-дисплеев, что означает, что большинство существующих сканеров могут считывать штрих-коды и QR-коды, отображаемые на дисплее электронной бумаги.
Дисплеи на электронной бумаге создают видимое изображение, отражая окружающий свет от белых частиц (а не от черных), точно так же, как напечатанный штрих-код виден глазу или сканеру. ЖК-дисплеи, напротив, не отражают. Они работают, пропуская свет через слой жидких кристаллов, поэтому некоторые типы сканеров могут быть не в состоянии определить разницу между областями, которые наши глаза воспринимают как темные и светлые.
5. Электронная бумага плохо читается при солнечном свете.
ЖК-дисплеистановятся практически нечитаемыми при ярком солнечном свете, потому что подсветка, предназначенная для отображения изображения на жидких кристаллах, не может конкурировать с яркостью солнца.
И наоборот, дисплеи с электронной бумагой отлично подходят для использования на солнце, потому что они отражают. Изображение на дисплее остается видимым при солнечном свете точно так же, как печатные краски на бумаге: темные области поглощают солнечный свет, а светлые области отражают его, создавая тем самым видимое изображение.
Это одна из причин, почему электронные книги так популярны среди отдыхающих, ищущих солнца.
6. Вы должны находиться прямо перед дисплеем электронной бумаги, чтобы прочитать его.
Отражающая природа электронной бумаги означает, что в некоторых случаях она фактически предлагает углы обзора, близкие к 180 °. Таким образом, даже если вы не можете смотреть прямо на дисплей электронной бумаги, вы все равно сможете прочитать его содержимое.
7. Электронная бумага работает только при комнатной температуре.
Большинство панелей для электронной бумаги предназначены для использования при температуре от 0 ° до 50 ° C, что означает, что они не ограничиваются случаями использования «при комнатной температуре».Действительно, существуют так называемые панели с широким диапазоном температур, такие как линейка продуктов A-MA, которые можно использовать при температурах до –25 ° C.
8. Обновление одной части экрана электронной бумаги требует обновления всего экрана.
Традиционно обновление изображения на экране электронной бумаги требовало обновления всего его содержимого. Вот почему вы получаете полноэкранный эффект «моргания» во многих электронных книгах, когда вы «переворачиваете страницу» своей книги.
Однако новая технология частичного обновления, которую можно использовать с существующими дисплеями электронной бумаги, означает, что теперь можно обновлять части дисплея электронной бумаги, оставляя остальную часть его содержания неизменной. Эта технология предлагает тройное преимущество: она занимает примерно четверть времени полного обновления, потребляет меньше энергии и улучшает работу пользователя.
Эта технология предлагает тройное преимущество: она занимает примерно четверть времени полного обновления, потребляет меньше энергии и улучшает работу пользователя.
9. Дисплеи электронной бумаги полностью черно-белые.
Хотя подавляющее большинство дисплеев для электронной бумаги представляют собой двухцветные черно-белые панели, технология быстро развивается, и теперь легко доступны трехцветные модели, содержащие красный пигмент. К ним относятся панели Spectra Pervasive Displays, которые бывают двух типов.Варианты 87 дюймов и 4,2 дюйма (см. Рисунок) .
Показаны примеры черных, белых и красных дисплеев Pervasive Displays.
Также разрабатываются панели, способные отображать желтый цвет в дополнение к черному, белому и красному.
10. Дисплеи на электронной бумаге доступны только в виде индивидуальных продуктов, которые вы должны покупать в больших количествах.
Некоторые люди могут откладывать эксперименты с электронной бумагой в дизайне своих продуктов, потому что они считают, что дисплейные панели доступны только в виде индивидуальных продуктов, что означает длительное время выполнения заказа, высокую стоимость и / или необходимость покупать оптом.
Фактически, в готовом виде доступно множество дисплеев для электронной бумаги, в том числе линейка широко используемых дисплеев от 1,4 до 10,2 дюйма. Дизайнеры продукта могут покупать в любом количестве — даже в единичных экземплярах — и в считанные дни получить электронные дисплеи в руках.
11. Нельзя сделать сенсорный экран из электронной бумаги.
Дисплеи E-paper не должны быть доступны только для чтения. Благодаря соответствующей технологии они могут использоваться как интерактивные сенсорные экраны. Например, производители продуктов добавили емкостные датчики поверх своих электронных дисплеев, чтобы обеспечить управление устройством одним пальцем, несколькими пальцами и жестами.Другие устройства сочетают электронную бумагу с резистивными сенсорными панелями или работают со специальным стилусом.
В результате дизайнеры продуктов могут пользоваться преимуществами электронной бумаги, предлагая своим пользователям интуитивно понятный сенсорный интерфейс, который они привыкли ожидать от своих смартфонов, планшетов, часов и ПК.
Интерфейсы шины CAN и LIN в автомобильной электронике
В современных автомобилях больше электроники, чем вы можете себе представить. Почти каждая важная часть имеет множество датчиков со специальным компьютером, который называется ECU (Electrical Control Unit).Обычно на одной машине бывает от нескольких до сотен ЭБУ. Особенно роскошные. Все модули должны работать как единое целое. Вот здесь и необходим надежный интерфейс подключения.
Вероятно, вы уже слышали о шине CAN (сеть контроллеров). Это стандартный шинный интерфейс, используемый в большинстве транспортных средств, где бортовой компьютер взаимодействует с отдельными блоками управления, отвечающими за двигатель, коробку передач, климат, охранную сигнализацию и подушки безопасности. Устройства CAN подключаются с помощью сигнальных проводов типа витая пара, которые более устойчивы к помехам.Сигналы обычно работают на уровне 5 В. Скорость передачи данных может достигать 1 Мбит / с для кабеля длиной 40 м.
Инженеры хорошо продумали протокол CAN. Он был разработан, чтобы быть гибким, надежным и прочным. На одной шине может быть более одного ведущего устройства CAN. Например, может возникнуть ситуация, когда несколько мастеров начнут общение одновременно. В этом случае приоритет сообщения используется для определения того, кто будет иметь право передавать данные первым.Узлы CAN действуют как независимые блоки и могут получать любое сообщение и при необходимости предпринимать действия. Эта функция называется «многоадресной рассылкой». Это позволяет добавлять новые устройства CAN к существующей шине без перенастройки существующей настройки.
CAN против интерфейса LIN
Интерфейс CAN — это сложный интерфейс, позволяющий использовать несколько мастеров, что делает его надежным и универсальным. Но из-за увеличения стоимости электроники, используемой в автомобилях, производители начали искать более дешевые решения, которые дополняли бы шину CAN и были более доступными. Они придумали шину LIN (Local Interconnect Network).
Они придумали шину LIN (Local Interconnect Network).
LIN — более простой стандарт по сравнению с CAN. LIN может иметь до 16 подчиненных узлов, управляемых одним главным. Это медленнее и дешевле, поскольку узлы синхронизируются мастером (нет кристаллов для каждого ведомого узла). LIN может быть реализован просто как подфункция в интерфейсе CAN-LIN с использованием USART в микроконтроллере RISC. CAN-трансивер — сложное устройство, поэтому обычно он поставляется как отдельное периферийное устройство или как отдельный чип.LIN использует один провод для связи с уровнем напряжения сигнала около 40 В. Он может достигать скорости передачи данных до 19,2 кбит / с при максимальной длине линии 40 м.
После этого краткого обзора становится очевидным, что интерфейс LIN является низкополосным , менее эффективным интерфейсом шины по сравнению с CAN. С другой стороны, там, где эффективность не является обязательным фактором, она служит дешевым дополнением к сети CAN.
: CAN, LIN и Ethernet | Автор: Онур Узун
Автомобильная шина — это специализированная внутренняя коммуникационная сеть, которая соединяет компоненты внутри транспортного средства (например,грамм. автомобиль, автобус, поезд, промышленный или сельскохозяйственный транспорт, корабль или самолет). Особые требования к управлению транспортными средствами, такие как гарантия доставки сообщений, отсутствие конфликтов сообщений, минимальное время доставки, низкая стоимость и устойчивость к электромагнитным помехам, а также избыточная маршрутизация и другие характеристики требуют использования менее распространенных сетевых протоколов. . Протоколы включают сеть контроллеров (CAN), локальную сеть межсоединений (LIN) и другие. Обычные компьютерные сетевые технологии (такие как Ethernet и TCP / IP) используются редко, за исключением самолетов.
Микроконтроллер (или MCU для микроконтроллер ) — это небольшой компьютер на одной интегральной схеме. В современной терминологии это похоже на систему на кристалле или SoC, но менее сложна; SoC может включать микроконтроллер в качестве одного из своих компонентов. Микроконтроллер содержит один или несколько процессоров (ядер процессора), а также память и программируемые периферийные устройства ввода / вывода.
В современной терминологии это похоже на систему на кристалле или SoC, но менее сложна; SoC может включать микроконтроллер в качестве одного из своих компонентов. Микроконтроллер содержит один или несколько процессоров (ядер процессора), а также память и программируемые периферийные устройства ввода / вывода.
A Controller Area Network ( CAN-шина ) — это надежный стандарт автомобильной шины, разработанный для того, чтобы микроконтроллеры и устройства могли обмениваться данными друг с другом в приложениях без главного компьютера.Это протокол на основе сообщений, изначально разработанный для мультиплексной электропроводки в автомобилях с целью экономии меди, но также используется во многих других контекстах.
LIN ( Local Interconnect Network ) — это последовательный сетевой протокол, используемый для связи между компонентами в транспортных средствах. Потребность в дешевой последовательной сети возникла по мере того, как технологии и средства, реализованные в автомобиле, росли, в то время как шина CAN была слишком дорогой для реализации для каждого компонента в автомобиле.
Ethernet — это семейство компьютерных сетевых технологий, обычно используемых в локальных сетях (LAN) и глобальных сетях (WAN).
Уровень 7: прикладной уровень. Это уровень, на котором идентифицируются партнеры по обмену данными (есть ли с кем поговорить?), Оценивается пропускная способность сети (позволит ли сеть мне поговорить с ними прямо сейчас?), И это создает объект для отправки или открывает объект получила. (Этот уровень — , а не — само приложение, это набор служб, которые приложение должно иметь возможность использовать напрямую, хотя некоторые приложения могут выполнять функции уровня приложения.)
Уровень 6: Уровень представления. Этот уровень обычно является частью операционной системы (ОС) и преобразует входящие и исходящие данные из одного формата представления в другой (например, из открытого текста в зашифрованный текст на одном конце и обратно в открытый текст на другом).
Уровень 5: Сеансовый уровень. Этот уровень устанавливает, координирует и завершает разговоры. Услуги включают аутентификацию и повторное подключение после прерывания. В Интернете эти службы для большинства приложений предоставляют протокол управления передачей (TCP) и протокол пользовательских дейтаграмм (UDP).
Этот уровень устанавливает, координирует и завершает разговоры. Услуги включают аутентификацию и повторное подключение после прерывания. В Интернете эти службы для большинства приложений предоставляют протокол управления передачей (TCP) и протокол пользовательских дейтаграмм (UDP).
Уровень 4: Транспортный уровень. Этот уровень управляет пакетированием данных, а затем доставкой пакетов, включая проверку на наличие ошибок в данных после их поступления. В Интернете TCP и UDP также предоставляют эти услуги для большинства приложений.
Уровень 3: сетевой уровень. Этот уровень обрабатывает адресацию и маршрутизацию данных (отправляя их в правильном направлении в нужное место назначения при исходящих передачах и принимая входящие передачи на уровне пакетов).IP — это сетевой уровень Интернета.
Уровень 2: Уровень канала передачи данных. Этот уровень устанавливает ссылки в физической сети, помещая пакеты в сетевые фреймы. Этот уровень имеет два подуровня: уровень управления логическим каналом и уровень управления доступом к среде передачи. Ethernet — это основной используемый уровень канала передачи данных.
Этот уровень имеет два подуровня: уровень управления логическим каналом и уровень управления доступом к среде передачи. Ethernet — это основной используемый уровень канала передачи данных.
Уровень 1: физический уровень. Этот уровень передает поток битов по сети на электрическом, оптическом или радио уровне. Он предоставляет аппаратные средства для отправки и получения данных в сети оператора связи.
Переоценка роли шины LIN в приложениях датчиков и управления транспортными средствами
Когда Galvin Manufacturing Corp. (сегодня Motorola) представила встроенное автомобильное радио в 1930-х годах, немногие могли представить, как будет выглядеть будущее. В течение многих лет единственным электронным компонентом в машине было радио. Информационно-развлекательная система в современном автомобиле — это лишь одна из многих систем с электрическим управлением: количество электронных блоков управления (ЭБУ) в современном автомобиле может достигать 80 (, рисунок 1, ). Неудивительно, что рынок автомобильных электронных компонентов находится на подъеме и, как ожидается, к 2018 году достигнет 18,5 млрд долларов.
Неудивительно, что рынок автомобильных электронных компонентов находится на подъеме и, как ожидается, к 2018 году достигнет 18,5 млрд долларов.
В первые годы практиковалось создание автономных автономных электронных систем. Вскоре стало понятно, что существует потребность в механизме, позволяющем системам взаимодействовать друг с другом. Это привело к внедрению сетей, таких как каналы последовательной связи (шина), которые координировали бы отдельные электрические системы и привели к улучшению функциональности транспортного средства в целом.
Рисунок 1: Несколько электрических систем в автомобиле
В 1983 году компания Bosch приступила к разработке шины сети контроллеров (CAN) и официально выпустила протокол в 1986 году. Даже сегодня, когда доступны различные стандарты автомобильных шин, CAN продолжает оставаться самой популярной. В сети CAN все узлы (происходящие из разных ЭБУ) действуют как ведущие (т. Е. Топология ведущий-ведомый отсутствует) и им не назначаются конкретные адреса. Скорее, сообщения содержат «идентификаторы».
Скорее, сообщения содержат «идентификаторы».
В данный момент несколько узлов могут передавать данные на шину CAN. Затем идентификатор сообщения помогает определить приоритет сообщений. Сообщение с наивысшим приоритетом переведет CAN-шину в доминирующее состояние, и все остальные узлы прекратят передачу. Фактически, узлы являются приемопередатчиками и, исходя из определенных функций, они могут отслеживать определенные сообщения от шины, помимо передачи сообщений. Таким образом, информационный поток происходит между разными узлами, подключенными к CAN-шине.
CAN отличается высокой надежностью из-за множественных проверок ошибок, таких как ошибки заполнения, битовые ошибки, ошибки контрольной суммы, ошибки кадра и ошибки подтверждения. Что касается скорости передачи данных, CAN поддерживает до 1 МБ / с. Таким образом, CAN является выбором по умолчанию для подключения ЭБУ критически важных функций в транспортных средствах (например, коробка передач, датчик температуры и т. Д.).
Д.).
Однако роль электроники в автомобилях не ограничивается только этими критически важными узлами. С годами рынок автомобильной электроники для кузова рос.Примерами приложений управления кузовом являются сиденья, окна, умные дворники и датчики климат-контроля. Ключевым требованием к кузовной электронике является обеспечение повышенного комфорта и безопасности автомобиля. Это системы, которые могут не требовать такой высокой надежности, как критически важные ЭБУ, но они по-прежнему требуют автомобильного стандарта для связи по сети.
Различные системы и типы сетей, которые им требуются, сгруппированы ниже:
- Обычные приложения для кузова и силовой передачи используют протоколы со свойствами реального времени и в основном требуют CAN.
- Мультимедийные приложения требуют более высокой пропускной способности, скорости и даже беспроводного соединения. Bluetooth, MOST или Firewire — вот некоторые из сетей, используемых для этих приложений.
- Приложения, критически важные для безопасности, требуют надежных и отказоустойчивых протоколов. TT-CAN (Time-Triggered CAN) и FlexRay типичны для таких сетей.
- Интеллектуальные датчики и исполнительные механизмы в сиденьях, окнах, дворниках и даже в некоторых сложных ЭБУ требуют более простого обмена данными. Эти приложения обычно обрабатываются специальными протоколами OEM и не требуют интерфейса CAN или FlexRay для связи.
 TT-CAN (Time-Triggered CAN) и FlexRay типичны для таких сетей.
TT-CAN (Time-Triggered CAN) и FlexRay типичны для таких сетей.Для последней категории, где OEM-производители используют свои собственные протоколы, возникают трудности, такие как сложность и затраты поставщиков OEM-производителей на разработку различных систем без преимущества стандарта. Так в конце 1990-х годов возникло формирование консорциума LIN различными автопроизводителями. В конце концов, в 2002 году консорциум внедрил стандарт для организации сети в этих типах систем под названием LIN.
В отличие от более сложной и широко используемой шины CAN, LIN (Local Interconnect Network) представляет собой последовательный сетевой протокол, используемый для связи между компонентами в транспортных средствах и возникший из-за необходимости в недорогом протоколе последовательной связи между датчиками на базе микроконтроллера в автомобиле.
LIN против CAN
CAN дороже в реализации, чем LIN. Факторы, которые способствуют более высокой стоимости CAN, включают:
- Каждый узел в сети CAN требует тактового генератора или кристалла
- На уровне кремния CAN сложнее реализовать
- Используется 2-проводная передача.
Наиболее важно то, что вся дорогая архитектура избыточна для приложений, которые не требуют ни высокой надежности, ни высоких скоростей передачи данных.
Из-за вышеуказанных недостатков потребность в сетях LIN возросла. Роль шины LIN — дополнять шину CAN, а не заменять ее. Это недорогой протокол последовательной связи, который поддерживает удаленные и некритичные приложения в автомобильной сети. В отличие от CAN, LIN работает по топологии ведущий-ведомый. Обычно сеть состоит из одного ведущего и до 16 ведомых. Все коммуникации инициируются главным узлом. Поскольку все узлы синхронизируются мастером, точные часы требуются только в главном узле. Это одна из причин того, что LIN дешевле, чем CAN (где для всех узлов требуется кварцевый или прецизионный генератор тактовых импульсов).
Это одна из причин того, что LIN дешевле, чем CAN (где для всех узлов требуется кварцевый или прецизионный генератор тактовых импульсов).
Особенности и преимущества LIN
Ключевые особенности и преимущества LIN следующие:
- Дополнительная роль. Как уже говорилось, роль LIN заключается не в замене CAN, а в ее дополнении. Эта функция помогает CAN распространяться на удаленные иерархические подсети в приложениях.
- Однопроводная реализация — недорогая однопроводная реализация LIN (в отличие от имплантации витой пары CAN) значительно снижает затраты.
- Скорость передачи данных — скорость передачи данных ограничена 20 Кбит / с (из соображений контроля электромагнитных помех). Это помогает поддерживать надежность сети.
- Широковещательная последовательная сеть — Сеть LIN может иметь один главный и до 16 подчиненных узлов. Все сообщения исходят от ведущего, и самое большее одно ведомое отвечает в зависимости от идентификатора сообщения.
- Самосинхронизация — не требуется кристалл или резонатор, что значительно снижает стоимость внедрения.
- Время задержки — сети LIN обеспечивают гарантированное время задержки, что делает сеть более предсказуемой
- Общая реализация — LIN дешевле и проще в реализации, чем CAN.В случае CAN, каждый узел требует интерфейса CAN, кристалла и 2-проводного соединения. LIN может работать с простым блоком последовательной связи (SCB) и улучшенным интерфейсом ISO 9141. Кристалл не требуется, подключение выполняется одним проводом.
Таблица 1 предлагает быстрое сравнение функций LIN и CAN, чтобы помочь разработчикам выбрать одну сеть по сравнению с другой, в зависимости от требований к различным параметрам:
Таблица 1: Сравнение LIN и CAN
Компоненты системы на основе LIN
Настройка системы на основе LIN намного проще, чем установка системы на основе CAN.Компоненты, необходимые в системах на основе LIN:
- Физические трансиверы (PHY)
- Микроконтроллер с блоками последовательной связи (SCB) / интерфейсами
- Средства разработки: s / w
Типичная сеть LIN выглядит как система, показанная на рис. 2 , с одним главным и несколькими подчиненными узлами.
2 , с одним главным и несколькими подчиненными узлами.
1 Блок управления двигателем
2 Блок последовательной связи
3 Физический приемопередатчик
Рисунок 2: Типичная сеть LIN
Примечание о физических трансиверах: в большинстве реализаций LIN используется трансивер для управления интерфейсом и поддержки более высоких уровней напряжения.Эти приемопередатчики обычно находятся вне микроконтроллера.
Чтобы действовать как подчиненный узел в сети LIN, MCU требуется SCI (интерфейс последовательной связи) или SCB (блок последовательной связи), который может поддерживать UART для взаимодействия. Протокол LIN использует UART как базовое средство для передачи и приема. Если UART отсутствует в аппаратном обеспечении MCU, его можно альтернативно реализовать с помощью программного обеспечения. Однако такой метод не рекомендуется, поскольку он без необходимости нагружает процессор.Чтобы работать в качестве главного узла, нам понадобится MCU более высокого класса. Помимо UART, поддерживающего SCI, еще одним требованием для мастерноды является генератор тактовых импульсов.
Помимо UART, поддерживающего SCI, еще одним требованием для мастерноды является генератор тактовых импульсов.
Шина, используемая в LIN-соединении, является однопроводной и должна соответствовать ISO9141. В настоящее время у нас есть более сложные микроконтроллеры для автомобилей, которые имеют специальную поддержку для LIN в виде встроенного LIN PHY. Эта интеграция делает реализацию более компактной и простой.
Большинство поставщиков MCU поддерживают интерфейс LIN по крайней мере в одном из своих семейств устройств.Примером является PSoC (программируемая система на кристалле) Cypress Semiconductor (http://www.cypress.com/psoc/), который предлагает архитектуру системы на кристалле, объединяющую программируемую логику, память и микроконтроллер на одном кристалле. Эти устройства поддерживают интерфейсы последовательной связи, которые могут быть настроены как LIN, и, следовательно, имеют хороший потенциал для использования в автомобильных приложениях, требующих LIN.
Помимо MCU и LIN PHY, для настройки различных параметров интерфейса LIN обычно требуются инструменты разработки, такие как программные модули. Поставщики процессоров обычно предоставляют среды проектирования, которые позволяют одновременно проектировать аппаратное и микропрограммное обеспечение. Cypress, например, предоставляет PSoC Designer и PSoC Creator . Такие инструменты предоставляют гибкий компонент LIN или пользовательский модуль, который можно запрограммировать для работы в соответствии с требованиями проекта.
Поставщики процессоров обычно предоставляют среды проектирования, которые позволяют одновременно проектировать аппаратное и микропрограммное обеспечение. Cypress, например, предоставляет PSoC Designer и PSoC Creator . Такие инструменты предоставляют гибкий компонент LIN или пользовательский модуль, который можно запрограммировать для работы в соответствии с требованиями проекта.
также необходимо, чтобы их интерфейс LIN был проверен или сертифицирован на соответствие тестам соответствия спецификации LIN. Практически все OEM-производители предписывают это требование, а поставщики микроконтроллеров должны соблюдать это требование как часть процесса разработки.
Кадр сообщения LIN
Кадр сообщения LIN состоит из заголовка и ответа. Заголовок имеет фиксированную длину, а ответ состоит из 0–8 байтов данных. Время межкадрового ответа — это время, которое требуется ведомому устройству для ответа на запрос от ведущего устройства LIN. Он может варьироваться между узлами в сети, так как зависит от аппаратной и программной реализации отдельного узла. После ответа следует контрольная сумма, которая вычисляется для части данных кадра сообщения.
Он может варьироваться между узлами в сети, так как зависит от аппаратной и программной реализации отдельного узла. После ответа следует контрольная сумма, которая вычисляется для части данных кадра сообщения.
Заголовок разбит на три поля:
- Поле SYNC-break используется для активации всех подключенных подчиненных LIN-устройств для прослушивания следующих частей заголовка. Он состоит из одного стартового бита и нескольких доминирующих битов.
- SYNC-поле — это байт стандартного формата данных. Подчиненные устройства LIN, работающие на RC-генераторе, будут использовать расстояние между фиксированным количеством нарастающих и спадающих фронтов для измерения текущего битового времени на шине для пересчета внутренней скорости передачи.
- Поле идентификатора (ID) отправляется главным узлом всем узлам LIN и обычно содержит одно из 64 различных значений и включает два бита четности в 8-битных данных. Идентификатор содержит такую информацию, как отправитель, получатель, назначение и длина поля данных, которые впоследствии передаются по шине LIN.

Структуру кадра сообщения можно увидеть на рис. 3 .
Рисунок 3: Структура кадра сообщения LIN
Приложения LIN
Мы уже видели, какие типы автомобильных приложений требуют LIN.Давайте кратко рассмотрим список примеров приложений, в которых используются сети LIN (, таблица 2, ). Это показано в сравнении с приложениями, которым требуется CAN, чтобы лучше понять различия.
Таблица 2: Типичные приложения LIN
Количество электроники в автомобиле постоянно растет, равно как и сложность его сетей. Не далеко в будущем мы увидим беспилотные автомобили, которые разговаривают друг с другом. С увеличением количества и сложности автомобильных электрических сетей также растет число более простых и дешевых альтернатив, и наиболее популярным среди них оказывается LIN.
LIN уже стал стандартом для большинства приложений управления телом, которые не требуют защиты типа CAN, и будет оставаться самым популярным вариантом в будущем. LIN также постоянно обновляется в соответствии с последними требованиями, выпуская новые версии (последняя — 2.2A), чтобы соответствовать новым автомобильным стандартам. Это также требует, чтобы поставщики автомобильных микроконтроллеров были оснащены самой последней версией интерфейсов LIN, что позволяет им играть роль приложений для управления телом.
LIN также постоянно обновляется в соответствии с последними требованиями, выпуская новые версии (последняя — 2.2A), чтобы соответствовать новым автомобильным стандартам. Это также требует, чтобы поставщики автомобильных микроконтроллеров были оснащены самой последней версией интерфейсов LIN, что позволяет им играть роль приложений для управления телом.
Сивагуру Ноопуран () — инженер по маркетингу продуктов в Cypress Semiconductor , с опытом работы более пяти лет. Его основные интересы включают продукты пользовательского интерфейса и управление продуктами.
Анирбан Сенгупта работает менеджером по ценообразованию в Cypress Semiconductor . Он имеет степень бакалавра электротехники в Национальном технологическом институте Индии и степень MBA по маркетингу в Центре управления и развития человеческих ресурсов Symbiosis (SCMHRD), Пуна, Индия.
Продолжить чтение
Знакомство с шиной LIN
Сообщения создаются, когда главный узел отправляет фрейм, содержащий заголовок.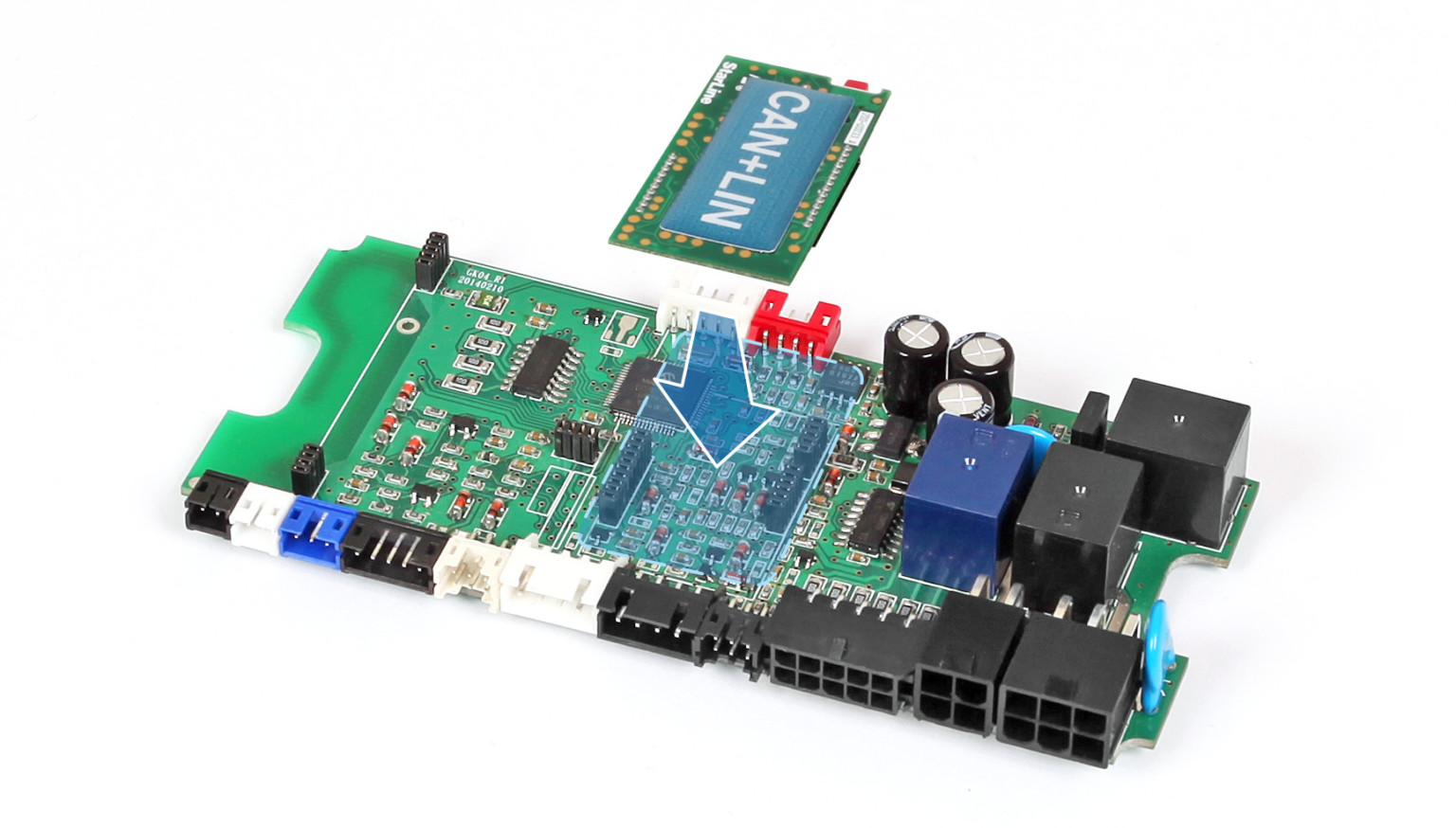 Затем подчиненный узел (-ы) заполняет кадр данными в зависимости от заголовка, отправленного от главного.
Затем подчиненный узел (-ы) заполняет кадр данными в зависимости от заголовка, отправленного от главного.
Рисунок 3: Пример кадра LIN.
Существует три различных способа передачи кадров по шине: безусловная, по событию и спорадические кадры.
Безусловные кадры
Это «нормальный» тип связи LIN. Мастер отправляет заголовок кадра в запланированном слоте кадра, а назначенный подчиненный узел заполняет кадр данными.
Кадры, запускаемые событием
Цель этого метода — получить как можно больше информации от подчиненных узлов без перегрузки шины кадрами. Кадр, запускаемый событием, может быть заполнен данными от более чем одного подчиненного узла. Подчиненное устройство обновляет данные только в кадре, запускаемом событием, когда значение изменилось.Если более чем одно ведомое устройство хочет обновить данные в кадре, возникает коллизия. Затем мастер должен отправить безусловные кадры каждому из подчиненных, начиная с того, которое имеет наивысший приоритет.
Спорадические рамки
Этот метод обеспечивает некоторое динамическое поведение статическому протоколу LIN. Заголовок спорадического кадра отправляется мастером только тогда, когда он знает, что сигнал был обновлен в ведомом узле. Обычно ведущее устройство заполняет байты данных самого кадра, а ведомые узлы являются получателями информации.
Определение байтового поля
Протокол побайтно-ориентированный, что означает, что данные отправляются по одному байту за раз. Одно байтовое поле содержит стартовый бит (доминантный), 8 бит данных и стоповый бит (рецессивный). Биты данных отправляются первым младшим значащим битом (младший бит первым). Передачу данных можно разделить на главную задачу и подчиненную задачу.
Рисунок 4: Структура байтового поля.
Основная задача
Кадр (заголовок), который отправляется мастером, состоит из трех частей; прерывание синхронизации, байт синхронизации и поле идентификатора.Каждая часть начинается со стартового бита и заканчивается стоповым битом.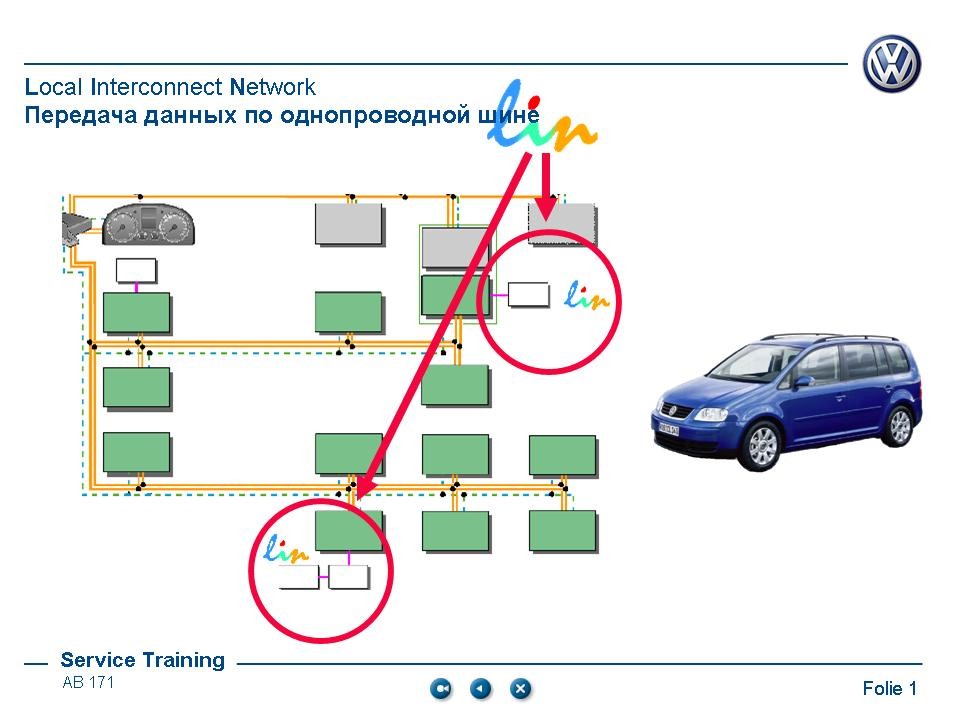
Разрыв синхронизации отмечает начало сообщения и должен иметь длину не менее 13 доминирующих битов, включая стартовый бит. Разрыв синхронизации заканчивается «разделителем разрыва», который должен быть как минимум одним рецессивным битом.
Рисунок 5: Поле прерывания.
Байт синхронизации отправляется для определения времени между двумя задними фронтами и, таким образом, определения скорости передачи, которую использует ведущее устройство. Битовая комбинация — 0x55 (01010101, максимальное количество ребер).Это особенно полезно для совместимости с готовыми подчиненными узлами.
Рисунок 6: Поле байтов синхронизации.
Поле ID содержит идентификатор длиной 6 битов и два бита четности. 6-битный идентификатор содержит информацию об отправителе и получателе, а также о количестве байтов, которое ожидается в ответе. Биты четности вычисляются следующим образом: четность P0 является результатом логической операции «исключающее ИЛИ» между ID0, ID1, ID2 и ID4. Четность P1 — это инвертированный результат логического «XOR» между ID1, ID3, ID4 и ID5.
Четность P1 — это инвертированный результат логического «XOR» между ID1, ID3, ID4 и ID5.
Рисунок 7: Поле идентификатора.
Рисунок 9: Длина кадра в зависимости от ID.
Ответ (поле данных) от ведомого может иметь длину 2, 4 или 8 байтов в зависимости от двух MSB (старший байт) идентификатора, отправленного ведущим. Эта возможность появилась с LIN 2.0, более старые версии имеют статическую длину 8 байтов.
Рисунок 8: Поле данных ответа.
Задача раба
Ведомое устройство ожидает прерывания синхронизации, после чего синхронизация между ведущим и ведомым начинается с байта синхронизации.В зависимости от идентификатора, отправленного мастером, ведомое устройство будет либо получать, либо передавать, либо вообще ничего не делать. Подчиненное устройство, которое должно передать, отправляет количество байтов, запрошенное мастером, а затем завершает передачу с полем контрольной суммы.
Есть два разных типа контрольной суммы. Классическая контрольная сумма используется в LIN 1. 3 и состоит из перевернутой восьмибитовой суммы всех (8) байтов данных в сообщении. Новая контрольная сумма, используемая в LIN 2.0, также включает защищенный идентификатор при вычислении контрольной суммы.Инвертированная восьмибитная сумма не совпадает с модулем 256. Каждый раз, когда сумма больше 256, вычитается 255. Пример: 240 + 32 = 272 à 272-255 = 17 и так далее…
3 и состоит из перевернутой восьмибитовой суммы всех (8) байтов данных в сообщении. Новая контрольная сумма, используемая в LIN 2.0, также включает защищенный идентификатор при вычислении контрольной суммы.Инвертированная восьмибитная сумма не совпадает с модулем 256. Каждый раз, когда сумма больше 256, вычитается 255. Пример: 240 + 32 = 272 à 272-255 = 17 и так далее…
Для экономии энергии подчиненные узлы будут переведены в спящий режим после 4 секунд бездействия шины или если мастер отправил команду спящего режима. Пробуждение из спящего режима осуществляется доминирующим уровнем на шине, который могут создавать все узлы.
Диагностика
Новой функцией в LIN 2.0 является возможность считывания диагностической информации с главного и подчиненного узлов.Для этой цели используются два идентификатора кадра, оба из которых ожидают 8 байтов данных: кадр запроса главного с идентификатором 60 (0x3c) и ответ ведомого с идентификатором 61 (0x3d). Первый байт диагностического кадра — это NAD (адрес узла для диагностики), который представляет собой однобайтовый адрес диагностического узла. Диапазон значений: 1–127, 0 — зарезервировано, а 128–255 — для бесплатного использования. Существует три метода диагностики: диагностика на основе сигналов, диагностика, определяемая пользователем, или использование диагностического транспортного уровня.
Диапазон значений: 1–127, 0 — зарезервировано, а 128–255 — для бесплатного использования. Существует три метода диагностики: диагностика на основе сигналов, диагностика, определяемая пользователем, или использование диагностического транспортного уровня.
Диагностика на основе сигналов
Диагностика на основе сигналов является простейшим методом и использует стандартные сигналы в обычных кадрах, которые представляют:
- Низкие накладные расходы на подчиненных узлах.
- Стандартизированная концепция.
- Статический без гибкости.
Пользовательская диагностика
Определяемая пользователем диагностика может быть разработана с учетом потребностей конкретного устройства, но это также означает, что она не будет полезна для общих целей. Этот метод использует NAD в диапазоне 128–255.
Диагностический транспортный уровень
Этот метод полезен для сети LIN, построенной на базе CAN, в которой используется диагностика ISO. Используются НАД 1-127.Этот метод представляет:
Используются НАД 1-127.Этот метод представляет:
- Низкая нагрузка на ведущее устройство.
- Обеспечивает диагностику ISO для ведомых устройств LIN.
- Предназначен для более сложных и мощных узлов LIN.
Диагностический кадр называется PDU (блок пакетных данных) и начинается с NAD, который обращается к определенному узлу. После этого следует PCI (информация управления протоколом), которая обрабатывает управление потоком. Если типом PCI является Single Frame (SF), вся команда диагностического запроса помещается в один PDU.Если PCI-тип — это первый кадр (FF), следующий байт (LEN) будет описывать количество следующих байтов. Байты данных, которые не помещаются в первый кадр, будут отправлены в следующих кадрах с PCI-типом кадров продолжения (CF). Идентификатор службы (SID) указывает запрос и байты данных, которым следует следовать.
NAD | PCI | SID | Данные1 | Данные2 | Data3 | Данные4 | Data5 |
Рисунок 10: Тип кадра запроса PCI = SF
NAD | PCI | LEN | SID | Данные1 | Данные2 | Data3 | Data4 |
Рисунок 11: Фрейм запроса PCI-type = FF
NAD | PCI | Данные | Данные2 | Data3 | Данные4 | Data5 | Data6 |
Рисунок 12: Фрейм запроса PCI-type = CF
Кадр диагностического ответа строится аналогично. Идентификатор службы ответа (RSID) определяет содержание ответа.
Идентификатор службы ответа (RSID) определяет содержание ответа.
NAD | PCI | RSID | Данные1 | Данные2 | Data3 | Данные4 | Data5 |
Рисунок 13: Кадр ответа PCI-type = SF
NAD | PCI | LEN | RSID | Данные1 | Данные2 | Data3 | Данные4 |
Рисунок 14: Кадр ответа PCI-type = FF
Совместимость со старыми версиями (LIN 1.
 3)
3)Ведущее устройство LIN 2.0 обратно совместимо с ведомым устройством LIN 1.3 (с ограничениями). Подчиненные устройства LIN 2.0 и LIN 1.3 могут сосуществовать в сети, но следует избегать некоторых новых функций, таких как улучшенная контрольная сумма и автоматическое определение скорости передачи.
(PDF) Сравнение протоколов CAN, LIN, FLEX RAY и MOST в автомобильной шине
© JETIR, 2019 г., апрель 2019 г., выпуск 4 www.jetir.org (ISSN-2349-5162)
Сравнение CAN, LIN, FLEX RAY и MOST
Протоколы автомобильной шины
1Siddhartha V, 2Sitaram Yaji, 3Naveen Kalappa
1M.Tech. Студент, 2Профессор, 3 Главный архитектор, KPIT
1 Кафедра электроники и связи,
1 Технологический институт Нитте Минакши, Бангалор, Индия
Аннотация: Компоненты внутри транспортного средства связаны между собой через автомобильную шину. Электронным модулям, таким как блоки управления (ECU) двигателя
, блок управления трансмиссией (TCU), антиблокировочная тормозная система (ABS) и модуль управления кузовом (BCM), необходимо соединить между собой
, и они должны обмениваться данными друг с другом через комплексная бортовая сеть (ИВН). IVN являются гетерогенными
IVN являются гетерогенными
. Быстрое распространение электроники в автомобилестроении усложнило создание сетей и взаимодействие между
гетерогенной сетью. Таким образом, производители оригинального оборудования сделали шаг вперед, чтобы выяснить и использовать общепринятые протоколы автомобильных шин
. В этом документе основное внимание уделяется протоколам IVN, которые наиболее часто используются в архитектуре автомобильной сети
, и многим другим важным функциям, таким как скорость передачи, полезная нагрузка, контроль доступа, дальность действия, а также область применения, в которой
они могут быть реализованы в автомобиле.
Ключевые слова: CAN, LIN, MOST, внутренняя сеть (IVN).
I. ВВЕДЕНИЕ
Автомобильная коммуникационная сеть становится все более сложной, поскольку возрастает потребность в проводном управлении, телематике, предупреждении об авариях, удаленной диагностике
и обновлении программного обеспечения. В зависимости от местонахождения и функциональности модулей для диагностики разделены сетевые модули
и. В современный автомобиль встроены различные электронные модули.Последовательные шины
В современный автомобиль встроены различные электронные модули.Последовательные шины
используются для подключения электрических модулей. Автомобильные шины, такие как CAN, LIN, MOST и т. Д., Соединены между собой через сеть шлюза
, которая представляет собой мостовую сеть, которая обеспечивает беспрепятственное взаимодействие между протоколами разнородных шин.
Сегодня автопроизводители стремятся к анализу производительности бортовой сети с помощью имитационных моделей. Выполняя реалистичное моделирование
, выполняется экономичное сравнение преимуществ и недостатков различных протоколов и сетевых топологий
.Имитационный анализ поможет автопроизводителям снизить затраты и ускорить выход на рынок.
II. ПРОТОКОЛЫ АВТОМОБИЛЬНОЙ ШИНЫ
Несколько вычислительных устройств связаны сетью, что помогает обмениваться данными и общаться друг с другом. Одинаковые или похожие сетевые протоколы
используются как в проводных, так и в беспроводных технологиях [1]. Последние технологии, такие как ADAS
Последние технологии, такие как ADAS
, реализованы с помощью самых современных микроконтроллеров. Взаимодействие между контроллерами осуществляется с помощью бортовой сети
, такой как CAN, LIN, Flex Ray, MOST и т. Д.следовательно, шинная сеть должна быть достаточно уязвима для любых атак злоумышленников
[2]. Связь между мультимедийной шиной и интерфейсами беспроводной связи скоро будет установлена. Следует позаботиться о том, чтобы нижняя шина, такая как LIN или MOST, не могла отправлять сообщения в высокобезопасные шинные системы, такие как CAN или
Flex RAY [3]. В этой статье мы вкратце обсудили технологии протоколов CAN, LIN, MOST, Flex Ray bus.
А.Сеть контролируемых зон (CAN)
Сеть контролируемых зон (CAN) — это мощная последовательная шина транспортного средства MultiMaster. Устройства CAN на шине известны как узлы.
Узлы соединены друг с другом через двухпроводную шину, а провода представляют собой витую пару с сопротивлением 120 Ом. Используя CAN, микроконтроллер
Используя CAN, микроконтроллер
и устройства могут взаимодействовать друг с другом в любом приложении без главного компьютера.
Рис. 1: Структура шины CAN Рис. 2: Фрейм сообщения CAN
Знакомство с шиной локальной межсоединительной сети (LIN)
Шина LIN — это опрашиваемая шина с одним главным устройством и одним или несколькими подчиненными устройствами.Главное устройство содержит как главную задачу, так и подчиненную задачу. Каждое ведомое устройство содержит только ведомую задачу. Связь по шине LIN полностью контролируется главной задачей в главном устройстве. Основная единица передачи по шине LIN — это кадр, который делится на заголовок и ответ. Заголовок всегда передается главным узлом и состоит из трех отдельных полей: прерывания, синхронизации (sync) и идентификатора (ID). Ответ, который передается подчиненной задачей и может находиться либо в главном, либо в подчиненном узле, состоит из полезных данных и контрольной суммы.
Обычно главная задача опрашивает каждую подчиненную задачу в цикле, передавая заголовок, который состоит из последовательности идентификатора прерывания-синхронизации. Перед запуском LIN каждая подчиненная задача настраивается либо на публикацию данных на шину, либо на подписку на данные в ответ на каждый полученный идентификатор заголовка. После получения заголовка каждая подчиненная задача проверяет четность идентификатора, а затем проверяет идентификатор, чтобы определить, нужно ли публиковать или подписываться. Если ведомой задаче необходимо опубликовать ответ, она передает на шину от одного до восьми байтов данных, за которыми следует байт контрольной суммы.Если ведомой задаче необходимо подписаться, она считывает с шины полезные данные и байт контрольной суммы и предпринимает соответствующие внутренние действия.
Перед запуском LIN каждая подчиненная задача настраивается либо на публикацию данных на шину, либо на подписку на данные в ответ на каждый полученный идентификатор заголовка. После получения заголовка каждая подчиненная задача проверяет четность идентификатора, а затем проверяет идентификатор, чтобы определить, нужно ли публиковать или подписываться. Если ведомой задаче необходимо опубликовать ответ, она передает на шину от одного до восьми байтов данных, за которыми следует байт контрольной суммы.Если ведомой задаче необходимо подписаться, она считывает с шины полезные данные и байт контрольной суммы и предпринимает соответствующие внутренние действия.
Для стандартной связи между ведомым устройством ведущее устройство передает идентификатор в сеть, и только одно ведомое устройство отвечает полезными данными.
Связь между ведущим и ведомым осуществляется отдельной задачей ведомого в главном узле. Эта задача самостоятельно принимает все данные, опубликованные на шине, и отвечает, как если бы это был независимый подчиненный узел. Чтобы передать байты данных, ведущее устройство должно сначала обновить ответ своей внутренней ведомой задачи значениями данных, которые он хочет передать. Затем ведущее устройство публикует соответствующий заголовок кадра, а внутренняя задача ведомого устройства передает свои полезные данные на шину.
Чтобы передать байты данных, ведущее устройство должно сначала обновить ответ своей внутренней ведомой задачи значениями данных, которые он хочет передать. Затем ведущее устройство публикует соответствующий заголовок кадра, а внутренняя задача ведомого устройства передает свои полезные данные на шину.
Рис. 2. Фрейм сообщения LIN
Каждый кадр LIN начинается с разрыва, который состоит из 13 доминирующих битов (номинальных), за которыми следует разделитель разрыва из одного (номинального) рецессивного бита.Это служит уведомлением о начале кадра для всех узлов на шине.
2. Синхронизация Поле синхронизации — это второе поле, передаваемое главной задачей в заголовке. Синхронизация определяется как символ x55. Поле синхронизации позволяет подчиненным устройствам, которые выполняют автоматическое определение скорости передачи, измерять период скорости передачи и настраивать свои внутренние скорости передачи для синхронизации с шиной.
Поле ID — это последнее поле, передаваемое главной задачей в заголовке.Это поле обеспечивает идентификацию для каждого сообщения в сети и в конечном итоге определяет, какие узлы в сети получают или отвечают на каждую передачу. Все подчиненные задачи постоянно прослушивают поля идентификатора, проверяют их четность и определяют, являются ли они издателями или подписчиками для этого конкретного идентификатора. Шина LIN обеспечивает в общей сложности 64 идентификатора. Идентификаторы от 0 до 59 используются для сигнальных кадров (данных), 60 и 61 используются для переноса диагностических данных, 62 зарезервированы для определяемых пользователем расширений, а 63 зарезервированы для будущих усовершенствований протокола.ID (4)
Таблица 2. Метод расчета четности
4. Байты данных
Поле байтов данных передается ведомой задачей в ответе. Это поле содержит от одного до восьми байтов байтов данных полезной нагрузки.
5. Контрольная сумма
Поле контрольной суммы передается ведомой задачей в ответе. Шина LIN определяет использование одного из двух алгоритмов контрольной суммы для вычисления значения в восьмибитном поле контрольной суммы.Классическая контрольная сумма вычисляется путем суммирования только байтов данных, а улучшенная контрольная сумма вычисляется путем суммирования байтов данных и защищенного идентификатора.
Спецификация LIN 2.0 определяет процесс вычисления контрольной суммы как суммирование всех значений и вычитание 255 каждый раз, когда сумма больше или равна 256 (в отличие от по модулю 255 или по модулю 256). Согласно спецификации LIN 2.0 классическая контрольная сумма предназначена для использования с подчиненными узлами LIN 1.3, а улучшенная контрольная сумма — для использования с подчиненными узлами LIN 2.0.Он также указывает, что идентификаторы с 60 по 63 всегда должны использовать классическую контрольную сумму. Интерфейс NI LIN предоставляет атрибут для установки типа контрольной суммы на классический или расширенный.